铁路编组站现场作业人员高精度定位系统
2021-01-06乐建炜王晓强
乐建炜,王晓强,黎 斌
(1. 中国铁路信息科技集团有限公司,北京 100844;2. 中铁信弘远(北京)软件科技有限责任公司,北京 100038)
随着我国铁路运营里程不断增加,运输安全面临的风险也不断加大。积极推进北斗卫星导航系统在铁路中的应用,充分发挥其在定位、高精度测量、通信方面的技术优势,符合国家发展战略和安全要求[1],对于完善铁路技术体系、促进铁路技术发展、增强铁路运输战略安全性,有着十分重要的意义。
国内关于实时动态(RTK,Real-time Kinematic)定位技术的研究已取得不少成果。袁正午等采用3G无线通信技术基于嵌入式平台在流动站与连续运行参考站(CORS,Continuously Operating Reference Stations)中心建立数据链,以提高数据传输稳定性和定位精度[2]。在算法方面,祝会忠等提出仅用一个历元的观测数据确定RTK 中距离参考站间的双频载波相位整周模糊度单历元解算方法[3];李昕改进GPS/BDS 常规RTK 和中长距离RTK 及室内伪卫星RTK 高精度定位算法,可满足多种应用环境下高精度定位需求[4];高星伟等提出改进的中性大气模型及定性与定量分析方法,以消除中性大气对信号延时的影响[5];王世进等提出一种可使GPS/BDS RTK 定位在短基线的情况下获得更佳联合定位的方法[6]。在应用方面,仲跻炜等结合城市交通信息平台建设,实现车辆智能调度管理、监控与跟踪[7];轩志伟等设计了一种基于北斗差分定位技术的站场数字化系统,用于列车安全防护、作业监控等[8]。
借鉴已有研究成果和成功经验,结合铁路编组站实际状况,研究开发铁路编组站作业人员高精度定位系统(简称:系统),应用“北斗+RTK”高精度复合定位和动态坐标系转换等技术,实时获取现场作业人员的高精度定位数据,在此基础上实现现铁路编组站作业安全预警。
1 系统构成
系统主要由北斗+RTK”复合定位终端、“北斗+RTK”复合定位增强基站、数据差分服务器、代理服务器、应用服务器和实现内外网通信的铁路移动数据传输统一平台(MTUP,Unified Mobile Data Transmission Platform for Railway)组成,系统构成见图1 所示。
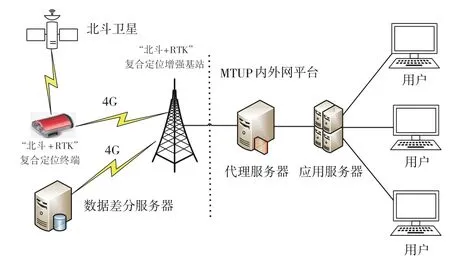
图1 系统构成示意
现场作业人员佩戴的复合定位终端,经过北斗卫星定位和数据差分服务器处理,获得的编组站作业人员实时定位数据的精度可达到厘米级;高精度的现场作业人员定位数据通过MTUP 实时传输到铁路内网,供铁路内网中各类应用使用。系统采用“北斗+RTK”复合定位增强基站,有效覆盖范围约为方圆5 km,铁路编组站大部分作业区域一般都处于其有效范围内。
1.1 北斗卫星导航系统的优势
北斗卫星导航系统是中国自行研制的全球卫星导航系统,具有开放兼容、技术先进、稳定可靠和覆盖全球的特点。与全球定位系统(GPS,Global Positioning System)等其它卫星导航系统相比,北斗系统具有以下优点:(1)混合星座定位,高轨卫星多,抗遮挡能力强;(2)三频信号单点定位,定位精度高;(3)具备短报文通信服务;(4)自主研发,独立自主,安全可靠。
1.2 “北斗+RTK” 复合定位增强基站
复合定位增强基站负责向“北斗+RTK”复合定位终端发送基准数据和误差修正数据,结合获取的卫星观测数据进行计算,修正和消除终端位置误差,获得较高定位精度。
1.3 “北斗+RTK”复合定位终端
复合定位终端主要由定位模块和通信模块2 部分组成。定位模块负责接收卫星信号和基站信号,计算定位终端所处位置的坐标;通信模块通过3G、4G、北斗短报文等方式,将定位模块计算得到的定位终端坐标等信息发送至系统主服务器。
2 系统功能
系统通过现场终端设备获取定位数据,根据现场通信网络状况,选择通过北斗地面基站或直接与无线网络基站建立通信,将定位数据发送至系统主服务器,主服务器接收和存储现场终端采集的定位数据;调度中心从主服务器获取定位数据,在地图上显示,提供现场作业人员实时定位、作业活动轨迹追踪、作业区电子围栏设置等功能。
2.1 现场作业人员实时定位
编组站现场作业人员佩戴的复合定位终端与定位基站之间完成双差模糊度的求解、基线向量的解算、坐标的转换,将定位数据上传至系统主服务器,由后台程序进行校验和解析后存储。现场作业人员实时定位过程如图2 所示。
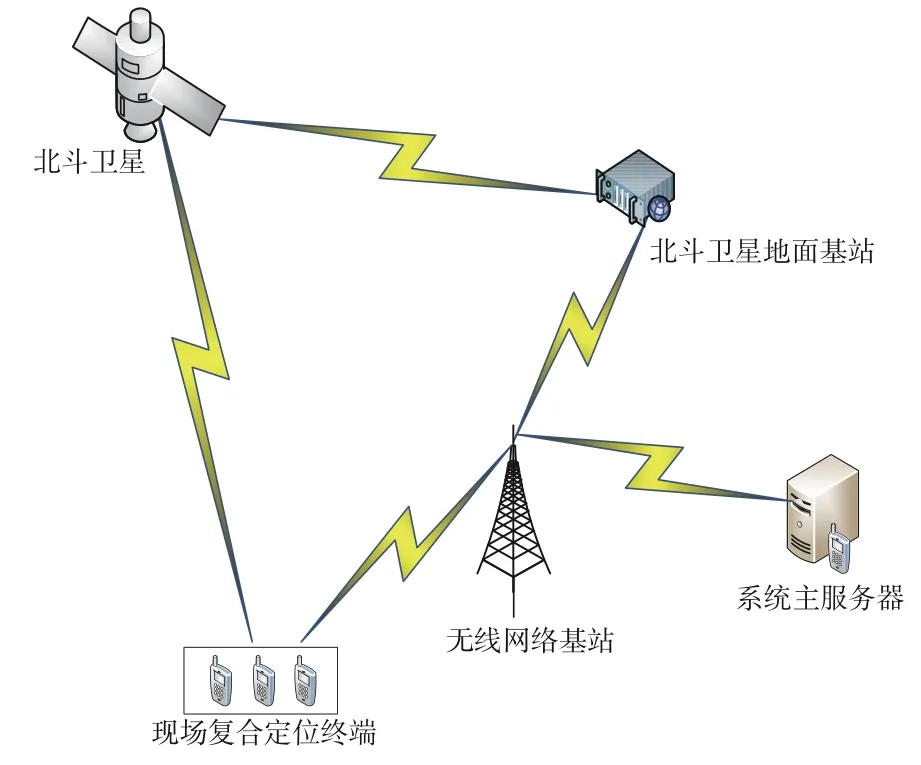
图2 现场作业人员的实时定位过程示意
系统采用北斗卫星定位和RTK 技术,精确定位编组站现场作业人员佩戴的复合定位终端,并从铁路货检安全监控与管理系统获取作业计划,经匹配得到现场作业人员的作业安排信息,将现场作业人员位置信息与作业内容实时展现在站场二维电子地图上,如图3 所示。

图3 站场电子地图显示的现场作业人员实时定位
2.2 作业活动轨迹追踪
系统可显示编组站现场作业人员在站场内从起点至终点的活动轨迹,提供轨迹回放开始、停止、加速、减速功能,如图4 所示。

图4 现场作业活动轨迹追踪
2.3 作业区电子围栏
系统可为铁路编组站站场作业区设置电子围栏,在电子地图上显示现场作业人员的作业活动和行动轨迹,将现场作业人员的定位数据与电子围栏进行比对,若出现作业人员越出指定作业区,立即进行告警,如图5 所示。
3 关键技术
3.1 北斗定位与基于载波相位的RTK 定位技术
系统将北斗定位与基于载波相位的RTK 定位技术相结合,通过实时处理2 个测量站载波相位观测量的差分方法,将基站采集的载波相位发给复合定位终端,进行求差解算坐标;载波相位差分算法流程见图6 所示。

图5 站场作业区电子围栏设置
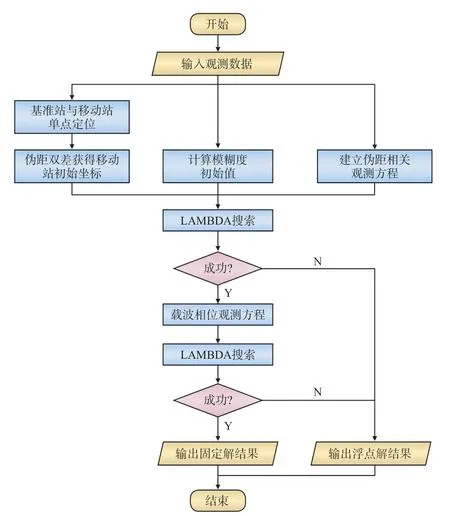
图6 载波相位差分算法流程
3.2 经纬度坐标与像素坐标的转换
系统以可缩放的矢量图形(SVG,Scalable Vector Graphics)作为底图,向右为x轴正方向,向下为y轴正方向,单位为像素。(1)从底图中找出纬度的最大值和经度的最小值的点,得到最接近西北方向的参照点,将其作为显示屏幕的原点;(2)参照点的经纬度转化为弧度,计算得出该参考点距离x轴和y轴的距离。
参照点经纬度转化成弧度的计算公式为:


其中, φ1为 参考点纬度; φ1为 参考点经度; θφ1为参考点纬度的弧度值; θφ1为参考点经度的弧度值。
参考点距离X 轴和Y 轴距离的计算公式为:

其中,Pr为极半径;Er为 赤道半径;MY为参考点距离y轴的距离;MX为参考点距离x轴的距离。
计算目标点到参照点X 轴Y 轴的实际物理距离,目标点经纬度转换成弧度的公式为:

其中, φ2为目标点纬度; φ2为 目标点经度;θφ2为目标点纬度的弧度值; θφ2为目标点经度的弧度值。
实际物理位置上参照点到x轴和y轴的距离的计算公式为:

其中,DX为距离x轴方向实际物理位置的距离;DY为距离y轴方向实际物理位置的距离。
将式(7)和(8)计算得出的实际物理距离DXDY换算成SVG 底图上对应的像素点,换算公式为:

其中,R为实际物理位置距离和屏幕像素点距离之间的比例系数,PX为目标点距x轴的像素距离,PY为目标点距y轴的像素距离。
4 结束语
系统采用北斗卫星定位、通信和RTK 定位技术,利用铁路编组站现场作业人员佩戴的复合定位终端,实现对现场作业人员的高精度定位,并提供作业活动轨迹追踪和作业区电子围栏设置等功能;系统定位准确、使用便捷、可靠性高,通过强化对现场作业人员的监控,规范铁路编组站作业流程,促进关键岗位工作流程的标准化,有助于提高现场作业效率,保障作业安全。
随着系统在应用中不断积累数据,今后通过数据分析还可实现更多增值应用,如通过分析各作业区不同时段作业人员的分布和作业情况,帮助提高编组站的管理水平。