基于Android端的电力GIS巡检机器人控制系统设计
2021-01-04邹德华周展帆王远笛方子豪
严 宇,邹德华,江 维,周展帆,王远笛,方子豪
基于Android端的电力GIS巡检机器人控制系统设计
严 宇1,邹德华2,江 维3,周展帆1,王远笛1,方子豪3
(1. 国网湖南省电力有限公司 检修公司,湖南 长沙 410004;2. 国网湖南省电力有限公司 输电检修分公司,湖南 衡阳 420100;3. 武汉纺织大学 机械工程与自动化学院,湖北 武汉 430073)
Android系统是现在使用最多的移动操作系统,能够弥补传统基于PC端的工业控制的诸多缺陷,基于此,本文面向电力系统GIS设备检修任务提出一种基于Android端的GIS巡检机器人新型控制系统,设计机器人的硬件控制系统,开发Android软件人机交互平台,在Android移动设备上实现机器人的远程控制。同时,对所设计的GIS巡检机器人控制系统进行调试与结果分析。实验测试结果验证了基于Android端的机器人控制系统能够满足电力系统GIS设备的巡检作业需求。最后,通过硬件系统、软件系统、机械系统集成设计开发出电力GIS巡检机器人物理样机,相比传统的基于PC端的机器人控制系统,基于Android端的机器人控制系统工程实用性更强、通用性更好,便于二次开发,具有较强的推广和应用价值。
Android端;GIS;机器人;控制系统;物理样机
0 引言
作为变电设备的重要发展方向,系统内建设有大量GIS设备[1-4],新建设的变电站大都是GIS设备,GIS属于金属封闭设备,一旦有内部故障,查找与处理需要打开气室,非常的不便,安全与经济性差。且大部分情况下,GIS检修并不能直接解体故障单元,都需要一层层解体,加上恢复的时间,一个小问题可能就耗费几十万,需要半个月时间。从目前的内部缺陷看,80%以上集中为固定件松动、清洁度差等小问题。因此,设计开发一款体积小、操作灵巧的GIS设备检修机器人[5-8]辅助或者替代人工进行GIS设备的检修维护作业,其对于提高作业效率、作业可靠性及电力系统运维管理自动化水平的提高具有重要理论意义与实际应用价值。在GIS检修机器人作业过程中,各关节自由度灵巧控制是顺利完成作业的关键,目前很多机器人关节电机控制方式还停留在传统的物理器件控制方式上,对于传统的关节电机控制系统,只是简单的一个单片机电机控制系统,控制关节运行时只能现场就近操控,并且关节运行数据也只能现场获取,无法做到远程监控,传统控制方法的弊端愈发凸显。随着智能手机的普及和Android操作系统[9-10]的广泛应用,智能手机最大的优越性就在于其移动性与互联性,可通过无线通讯方式与机器人关节控制系统连接,实现远程监控控制系统的目的。相较于传统控制方式,基于智能手机终端的机器人关节控制有以下明显优势[11-12],其一,精确的数字量调速。通过单片机反馈回的数据在手机端呈现,可视化精确调节,而传统物理控制电路调速只能模糊调速。其二,远程实施控制。可以通过手机界面实时查看关节运行状态,根据需要从手机端即可控制关节达到运行要求,而传统控制方式只能现场操作控制。其三、控制参数可以灵活改变。可以在手机端随时设置复杂的数字控制系统,而无需重复在单片机上重复编程,节省了机器人系统地维护成本。当智能手机与MCU等控制装置组成一个系统时,可以提供人性化的人机交互界面和可视化的操作平台,节约一定的IO硬件的开发,同时也可将大计算量的工作交于手机端执行,从而弥补MCU性能不足的缺点,甚至能直接从手机端动态的改变机器人关节控制算法。
综上所述,针对上述传统基于PC端控制的GIS巡检机器人控制系统的缺陷, 本文开发了一款轻巧、灵便、新型的适用于电力系统GIS设备检修作业机器人物理样机,在上层控制上,针对传统PC控制的诸多缺陷,基于Android Studio 开发平台开发了机器人的无线终端控制系统,通过作业实验验证了基于Android端的机器人控制系统具有较好的稳定性、实时性和鲁棒性,并且本系统对于其它不同类型的机器人作业控制系统具有较强的可扩展性和通用性, 且易于开发和移植到其它机器人控制系统。
1 电力GIS巡检机器人控制系统总体架构
图1 基于Android端的GIS巡检机器人控制系统结构图


图2 GIS巡检机器人软件系统结构图
2 电力GIS巡检机器人硬件电路系统的设计
2.1 电力GIS巡检机器人机关节电机的基本原理

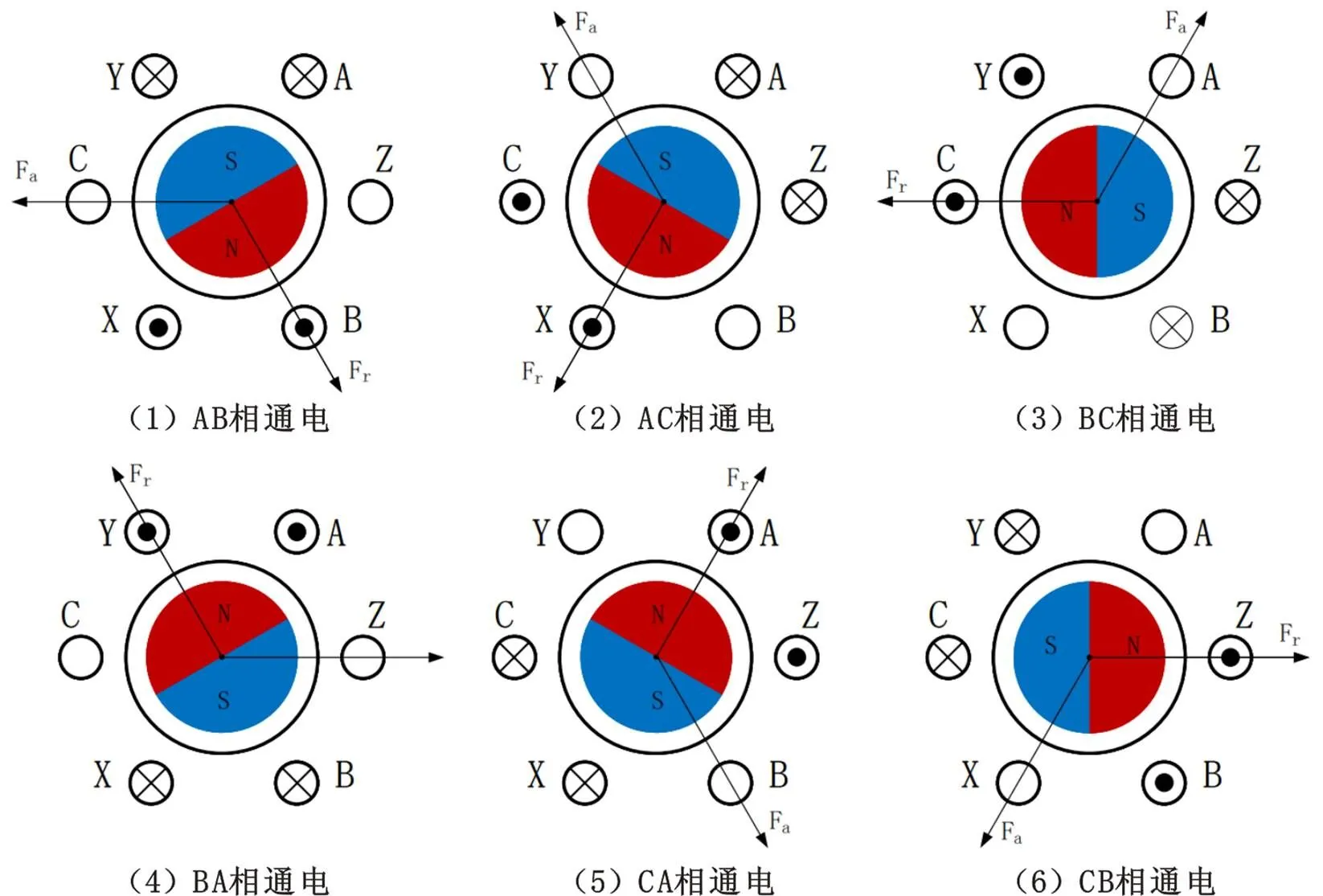
图3 GIS巡检机器人关节电机工作原理图
2.2 电力GIS巡检机器人关节电机反电动势检测电路设计


图4 GIS巡检机器人关节电机电动势过零时刻图
3 电力GIS巡检机器人Android控制端软件设计
3.1 软件系统总体结构
GIS巡检机器人应用程序使用的Android开发组件主要包括活动(Activity)和服务(Service)。Activity是应用程序的主要部分,提供界面显示,控件交互,控制整个应用运行状态的功能。Service为应用程序提供后台服务,与前台Activity交换信息,执行任务并返回结果。GIS巡检机器人应用程序有两个Activity,即可视化操作界面,SearchBluetooth和UIActivity。
3.2 Android端控制界面设计
基于Android端的GIS巡检机器人控制端控制软件的设计主要包括两部分,首先是SearchBluetooth:为应用程序初始活动,是蓝牙搜索界面,负责检测蓝牙权限,申请权限,开启蓝牙,搜索可用蓝牙设备并显示蓝牙搜索结果。其次是UIActivity:它是应用程序的主要活动,也为整个系统的监控界面,其界面如图5所示,程序流程如图6所示。UIActivity负责显示来自单片机的信息和发送给单片机的控制信息,同时, 控制服务ConnectService与单片机的直接通讯。

图5 GIS 机器人关节控制界面
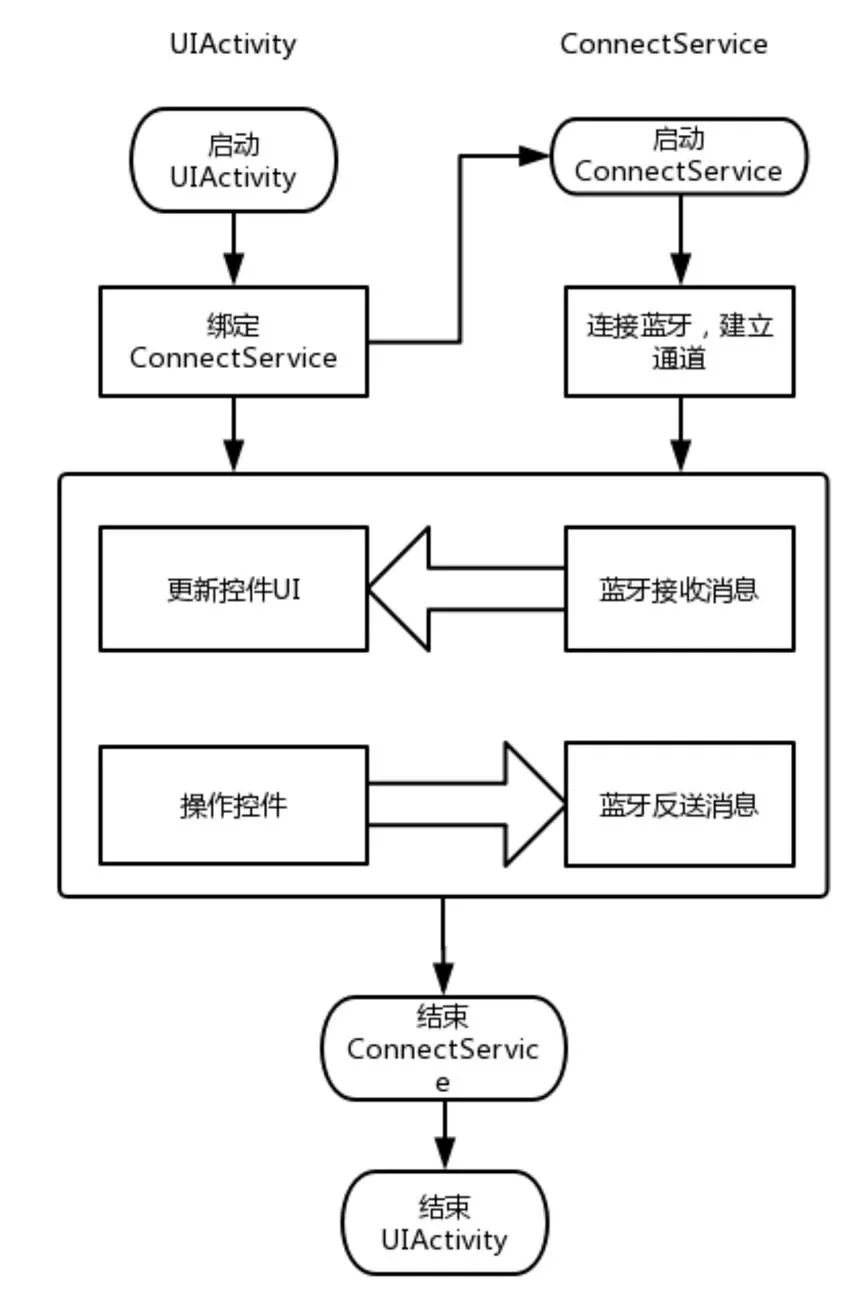
图6 UI界面及蓝牙通讯服务结构图
4 电力GIS巡检机器人物理实现与控制系统调试
4.1 电力GIS巡检机器人系统物理实现
GIS巡检机器人上位机系统由Android手机及控制应用程序组成,下位机系统各关节由无刷直流电机、无刷电机驱动电路、光电隔离电路、STM32f103控制器及HC-42蓝牙模块组成。通过硬件系统、软件系统和机械系统的集成设计可以得到开发的GIS巡检机器人物理样机系统(如图7所示)。

图7 GIS巡检机器人物理样机系统
4.2 电力GIS巡检机器人Android控制端应用程序测试
(1)蓝牙连接测试:打开应用程序并开启蓝牙后,开始搜索目标蓝牙设备。扫描到蓝牙模块的蓝牙名称和蓝牙地址,并在屏幕中显示出来,则搜索蓝牙成功。然后点击屏幕中的蓝牙名称,应用程序关闭了Searchbluetooth活动,进入UIActivity活动,当弹出Toast提示“连接蓝牙” 可以开始进行通讯。
(2)蓝牙通讯测试:在Android端上操作控件向蓝牙模块发送控制命令:①启动、②设置转速、③逆时针旋转、④顺时针旋转、⑤停止。测试结果符合数据通讯格式,则表示Android手机与蓝牙模块通讯成功。
(3)经测试空载且驱动电路电压为12V时,GIS巡检机器人系统中的关节电机最高转速为160r/s,对应PWM波占空比100%,最低转速为10r/s对应占空比10%,所并测得PWM占空比与电机转速的关系如图9所示。
图8 GIS机器人关节电机PWM占空比转速关系图
5 结论
(1)针对电力系统GIS设备的检修作业,提出了一种GIS巡检机器人的控制系统架构,设计并实现了基于Android端的GIS巡检机器人上位机控制系统。
(2)通过硬件系统、软件系统、机械系统的集成设计,开发了GIS巡检机器人物理样机,通过Android端控制系统的测试与实验,验证了系统设计的有效性。
(3)相比传统的基于PC端的机器人控制系统,基于Android端的机器人控制系统使用操控更加方便,程序结构化且易于二次开发,成本降低,且工程实用性更强。
[1] 马径坦, 赵军平, 游浩洋, 等. GIS支撑绝缘子表面状况对其雷电冲击闪络特性的影响[J]. 高压电器, 2016, 52(4): 63-69.
[2] 刘琳, 李晓昂, 张锐, 等. 影响GIS支柱绝缘子闪络电压的沿面电场特征参数[J]. 高电压技术, 2019, 45(9): 2740-2747.
[3] 马飞越, 刘威峰, 李奇超. 超声波局部放电检测在GIS自由颗粒缺陷检测中的应用[J]. 宁夏电力, 2016, (10): 28.
[4] 任新新,胡文涛,吕海翔. 电缆管道巡检清理机器人的研究与设计[J]. 电力学报, 2016, (04): 25.
[5] 田可新, 王钢. GIS绝缘子在冲击电压下沿面闪络的分析[J]. 高压电器, 2003, 39(6): 14-16.
[6] Tang C, Hu H, Zhang M, et al. Real-time detection of moving objects in a video sequence by using data fusion algorithm [J]. Transactions of the Institute of Measurement and Control, 2019, 41(3): 793-804.
[7] Ege E, Ankarali M M. Feedback motion planning of unmanned surface vehicles via random sequential composition [J]. Transactions of the Institute of Measurement and Control, 2019. 0142331218822698.
[8] Cao X, Liu D, Ren X. Detection method for auto guide vehicle’s walking deviation based on image thinning and Hough transform [J]. Measurement and Control, 2019, 52(3-4): 252-261.
[9] 贾阳静, 邹念育, 雷冬鸣, 等. 基于Android和WIFI通信的智能家居系统设计[J]. 大连工业大学学报, 2016, (1): 67-71.
[10] 刘建华, 田岁苗, 赵勇. 基于Android的智能家居系统设计[J]. 西安邮电大学学报, 2013, 18(4): 71-74.
[11] 倪亚玲, 李晓宁, 张小红. 基于Android的无线智能家居系统设计与研究[J]. 计算机应用与软件, 2017, 34(11): 97-102.
[12] 丁函, 陆军军, 罗军, 等. 智能家居控制APP系统的设计与实现[J]. 计算机技术与发展, 2017, (01): 121-125.
Design of Electric Power GIS Inspection Robot Control System Based on Android
YAN Yu1, ZOU De-hua2, JIANG Wei3, ZHOU Zhan-fan1, WANG Yuan-di1, FANG Zi-hao3
(1. State Grid of Hunan Electric Power Company Maintenance Company, Changsha Hunan 410004, China;2. State Grid Hunan Transmission Maintenance Company, Hengyang Hunan 420100, China;3. School of Mechanical Engineering and Automation, Wuhan Textile University, Wuhan Hubei 430073, China )
The Android system is now the most used mobile operation system which can make up for many shortcomings of traditional PC-based industrial control. Based on this, this article proposes an Android-based GIS inspection robot innovation control system for power system GIS equipment maintenance tasks. The robot hardware control system was designed and Android software human-computer interaction platform was developed, and the robot remote control was realized on the Android mobile device. At the same time, debugging and analyzing the results of the designed GIS inspection robot control system. The experimental test results verify that the Android-based robot control system can meet the inspection requirements of power system GIS equipment. Finally, through the integrated design of hardware system, software system and mechanical system, a physical prototype of GIS inspection robot was developed. Compared with the traditional PC-based robot control system, the Android-based robot control system engineering has stronger practicability, better versatility, is convenient for secondary development, and has stronger promotion and application value.
Android; robot; gas insulated switchgear; control system; physical prototype
严宇(1986-),男,高级工程师,博士,研究方向:带电作业新技术及装备.
智能带电作业技术及装备(机器人)湖南省重点实验室/带电巡检与智能作业技术国家电网公司实验室开放课题资助项目(2020KZD1001); 国网湖南省电力有限公司科技项目(5126A318000J).
TM63
A
2095-414X(2020)06-0008-06
