未来测绘发展方向展望
2021-01-04白小刚
白小刚
(长沙市规划勘测设计研究院,湖南 长沙 410000)
测绘是运用各种测量方法将目标地形地貌数据进行采集、标注,形成地图。传统测绘由于技术、设备的限制,更多地是测绘人员到实地去采集相关数据,劳动强度大,由于实地情况复杂多样,对于作业人员存在一定的风险。经过半个多世纪的发展,无论从测量方法还是设备方面,都发生了日新月异的变化,涌现了诸如全球卫星定位系统、三维激光扫描、倾斜摄影测量等一大批先进的技术和设备。
1 现阶段测绘主要技术
随着近现代电子技术、计算机技术的高速发展,改变了整个测绘行业的生产作业模式。对比我院测绘生产实际情况,从早期50年代到90代末,控制测量还是要靠人工读数、记录,测图还是平板仪,数据成果还停留在纸质时代。随着改革开放步伐逐渐加大,测绘市场需求加大,早期低效率的测量手段被市场抛弃,高效率的设备开始不断投入和使用,完成了技术和设备的更新换代。
1.1 GPS技术
迈入到21世纪,美国在GPS基础上推出了民用政策,依托这一政策,彻底改变了传统控制测量的作业方法,极大地提高了工作效率。我院于20世纪初开始购入GPS设备进行控制测量作业,主要采用了静态测量的方法。并逐渐引入了电台RTK技术进行动态测量,改变了基础测量作业方法,加快了基础测量的更新速度。2007年12月,我院完成了长株潭GNSS连续运行参考站系统的建设,这标志着在长株潭范围内实现了坐标系统的统一、基础测量作业范围的全覆盖(图1)。
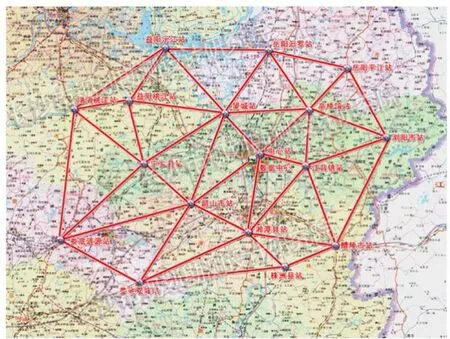
图1 长株潭GNSS连续运行参考站
现在GPS-RTK技术已经成为数据采集的主力军,它具有速度快,精度高,一人就可作业,所见即所得,在传统测量中占据着主要位置,它与全站仪构成了测量工作的中坚力量。
1.2 三维激光扫描
三维激光扫描技术主要采用高速激光扫描测量的方法,快速获取大面积高分辨率的被测对象表面的三维坐标数据、大量的空间点位信息,建立物体的三维影像模型,是一种全新的技术手段[1]。
三维激光扫描技术,早期由于价格昂贵,技术始终得不到广泛推广,反而制约了技术发展。而伴随着使用范围的扩大,使用频率的提升,三维激光扫描仪也在不断进化,设备的便携化,价格也不再高不可攀,使得这一技术得到了更多测量场景的应用,例如在地下空间测量(图2、图3)、建筑密集区域、复杂建筑的竣工测量等,相信随着使用的更加广泛,也会促使这一技术和设备不断得到进化。

图2 BLK360实地测量

图3 三维激光扫描效果图
1.3 倾斜摄影测量
摄影测量在经过3个阶段发展之后,来到了全面数字化阶段,计算机技术的发展以及数字图像处理等技术的应用,传统的采集同名点等工作,已经逐渐被计算机所替代。在无人机技术的推动下,摄影测量的使用从高空到低空、从大范围到小范围的转变,尤其是倾斜摄影测量(图4)发展迅速,它的数据处理过程更加智能化,其成果能够快速反映地物周边真实情况(图5),可实现单张影像量测,建筑物侧面纹理采集,有效降低城市三维建模成本[2]。

图4 多旋翼无人机

图5 三维模型效果图
2 新测绘需求
随着以5G、人工智能、自动驾驶为代表的新技术陆续涌现,国家也提出了“中国制造2025”的概念,自然资源部也提出“向非尺度地理实体全息数据库转变”的要求,在这种背景之下,测绘需要提供信息更加丰富,能够满足更多用户需求地服务。
新测绘更多地为了满足机器的需求,例如自动驾驶等,传统的二维平面地图承载的信息量有限,不能够满足未来的需求,以长沙市的万家丽高架桥为例,高架桥上有快速路,桥下有复杂的普通城市干道,地下有城市地铁,将这么多立体的信息在二维地图上表达,显然难以做到,即使采用颜色或特殊符号区别表示,那对于没有专业知识为背景的普通人,它也不能够分辨出哪里是桥、哪里是路,地图不能够抽象地表达实地事物,这也让地图失去了存在的基础。这就要求我们采取一种新的方式—三维地图,这也是未来的测绘发展方向。
3 新一代测绘技术
随着新的需求出现,传统低效的数据采集工作将被舍弃,能够同时采集多种数据并能有效融合的设备将会越来越多的投入使用,新的高效方法也将崭露头角,数据采集工作将会变得简单、轻松、高效。就目前发展方向来看,运用小型性的测量设备,采用非接触测量的方法已经逐渐成为主流,主要体现在SLAM技术和消费型测量设备等。
3.1 SLAM技术
SLAM是指搭载特定传感器的主体,在完全未知环境中通过自身传感器感知周围环境和位姿信息进行自身定位,并构建环境的增量式地图,最终完成自身定位与导航。它经历了传统时代(状态估计问题)、算法分析时代、鲁棒性-预测性时代,随着计算能力的提升及算法的改进,BA优化、位姿优化等手段逐渐成为主流。在人工智能技术的加入下,基于深度学习的SLAM越来越受到研究者的关注。
多传感器融合SLAM极大的提高了未知环境下创建地图的能力,如何提高多传感器融合的数据耦合度、提高算法的实时性、与深度学习和多机器人协同相结合将是多传感器融合SLAM未来一段时间的研究方向。可以相信在未来携带式SLAM帮助人们实时创建地图,不需要人工处理,直接输出实时地图,这将彻底改变测绘行业现状,对测绘行业产生深远影响。
3.2 消费型测量设备
苹果公司前不久新推出的2020款iPad Pro上运用全新的摄像头模组(增加了激光雷达传感器图6),激光雷达传感器采用的是直接飞行时间测量(Direct-ToF,简称DToF),通过发射、接收光并测量光子飞行时间,直接计算确定距离,它拥有响应快、功耗低等优势。可以将激光雷达传感器的深度数据与来自摄像头的图像数据,以及来自其传感器阵列的运动数据融合在一起,从而构建环境的空间映射。
将激光雷达技术小型化并带入到消费级电子设备中,未来这一技术有望引入到安卓阵营中,到那时人人手中一部手机就可以完成小范围内的三维建模(图7),不需要专业设备,不需要专业知识,每个人都可以绘制三维实时地图,带来的不仅仅是效率的提高,更是人们对未来虚拟现实的大量需求。相信这一技术的进步,将对三维建模技术带来深远的变革,也给未来的测绘工作带来无限的可能。

图6 iPad Pro摄像头模组

图7 三维建模模拟图
4 结论
未来的测绘工作主要是通过多种传感器大量地获取原始地形地貌数据,通过内业计算机智能化处理,辅以少量的人工干预,得以重建实地三维模型,通过对三维模型的再加工、再分析,就可针对不同行业快速输出与之相对的测量成果。
未来的测绘设备一定会具备小型化、便携化、网络化等特点,对测绘设备的使用者的要求会越来越低,设备的使用将更加智能、傻瓜,例如现在的三维激光扫描仪已经无需整平对中等操作,获取数据的工作将越来越加简单;无人机航拍从内到外已经从原来传统的作业模式彻底改变,流程更加简单。传统笨重、精密的测绘设备将会逐渐消失,取而代之的是依靠大量传感器获取数据,依靠强大的智能软件、算法处理数据,依靠无处不在的互联网分享数据。科学技术就是第一生产力,对设备如此,对人员也是如此,这就要求我们测绘行业人员改变自己单一的知识、技能架构,从多方面丰富自己的技能水平,作一个融合性人材,去适应时代的发展、拥抱未来。