下肢康复机器人设计与分析
2020-12-29徐林森王海平
杨 力,徐林森,王海平
(1.常州工业职业技术学院轨道交通学院,江苏 常州 213164)(2.中国科学院合肥物质科学研究所,安徽 合肥 230031)(3.江苏理工学院机械工程学院,江苏 常州 213163)
下肢康复机器人基于运动再学习理论而研发,是用于辅助肢体运动功能有障碍的患者进行康复训练,并能提供患者康复信息的辅助治疗自动化设备。机器人与人在同一个作业空间内带动患肢完成康复训练,使患肢逐渐恢复运动功能。机器人辅助治疗的优点为:可以将治疗师从康复训练过程中解放出来,使其能专心地针对患者病情变化制定合理的训练方案;能精确记录训练参数,对康复过程和效果进行客观评价;还能让患者直观地看到自己的训练进展,使训练过程更具有吸引力,从而提高患者参与治疗的积极性。
目前国内外市场上已投入生产的下肢康复机器人多为助力式直立行走模式或是悬吊减重模式[1-2],前者需要患者有足够的上肢力量,其有一定的平衡性隐患,后者则因为设备安装要求高、整体尺寸过大等难以普及。国内外相关机构正在研究坐姿下肢康复机器人[3-4],该机构具有结构简单、功能齐全、适用于家庭康复等优点。
本文根据坐姿下肢康复机器人特点,开展康复机器人构型与尺度优化设计,并对关键功能部件[5]进行一体化、轻量化设计,进一步保证患者使用该机器人康复训练的安全性与康复效果。
1 下肢康复机器人结构设计与计算
如图1所示,该下肢康复机器人共有4个自由度,即髋关节外展/内收、髋关节屈伸、膝关节屈伸、踝关节背屈/跖屈,适用于身高150~190 cm、体重在120 kg之内的用户,左右脚通用,运动范围:髋关节屈伸10°~120°,膝关节屈伸0°~135°,踝关节背屈30°~跖屈45°。
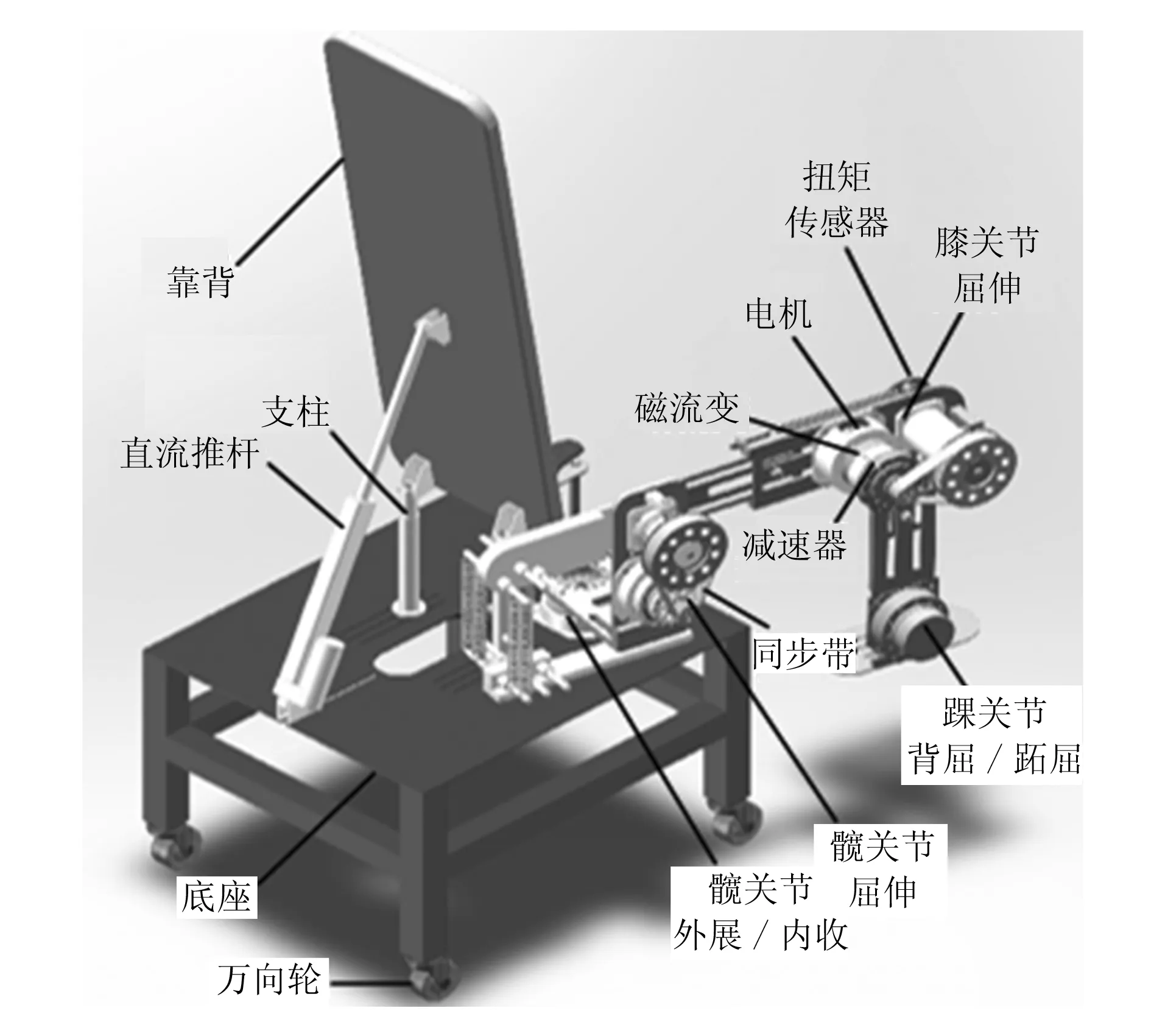
图1 脑卒中下肢康复机器人结构总图
1.1 髋关节结构设计
如图2所示,髋关节具有2个自由度,即1个旋转自由度、1个屈伸自由度,各用1个电机驱动,2个关节的旋转轴线共面且垂直,考虑到不同患者的腰围不同,两个关节之间的距离可以调整。
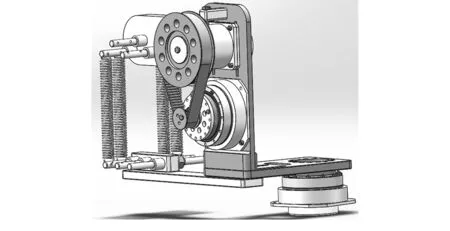
图2 髋关节总图
经计算可知,减速器输出最大扭矩小于髋关节扭矩,同时考虑到动力在传递过程中的传动效率问题,本文采用同步带传动,通过对减速器输出扭矩进行放大处理可以满足需求。另外,考虑到加工误差、装配精度、传动效率等问题,设计了弹簧辅助机构来平衡机械臂及人体下肢重力。
1.2 膝关节结构设计
如图3所示,膝关节具有1个屈伸自由度,由1个电机驱动,为了采购方便,膝关节电机选择与髋关节电机一致。根据GB 10000—1988中国成年人人体尺寸,大腿长度为380~520 mm,故大腿采用可调式的抽拉结构,以满足不同身高患者的需求。

图3 膝关节总图
膝关节也采用带传动并设计了弹簧辅助机构,其中弹簧的变形量通过调节螺母在带孔螺杆上移动的距离来调节。
1.3 踝关节结构设计
如图4所示,踝关节具有1个屈伸自由度,由1个电机驱动,踝关节电机、谐波减速器选型均与膝关节一致。根据GB 10000—1988中国成年人人体尺寸,小腿长度为320~420 mm,故小腿采用可调式的抽拉结构,以满足不同身高患者的需求。
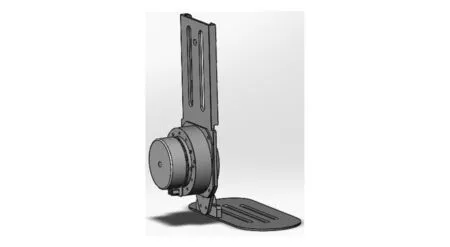
图4 踝关节总图
因踝关节处所需扭矩较小,故所选电机、谐波减速器的输出扭矩完全可以满足需求,不需要带传动机构,采用电机带动谐波减速器直接驱动。
1.4 ANSYS静力学分析[6]
根据GB 10000—1988 中国成年人人体尺寸,取大腿长为520 mm,小腿长为420 mm。
大腿约占体重的14%,小腿约占体重的4%,脚约占体重的1.5%。根据本文设定,最大穿戴者体重为120 kg,故大腿质量m1为17 kg,小腿质量m2为5 kg,脚质量m3为2 kg。机器人材料为铝合金,机器人大腿及小腿的厚度为6 mm,宽度为80 mm。机器人大腿尺寸为520 mm×80 mm×6 mm,质量m4为0.68 kg,小腿尺寸为420 mm×80 mm×6 mm,质量m5为0.55 kg。膝关节处电机+减速器+磁流变等质量取为m6=3 kg,踝关节处电机+减速器等质量取为m7=2 kg。髋关节处扭矩T1为
T1=m1×10×0.26+m2×10×0.47+m3×10×0.94+m4×10×0.26+m5×10×0.47+m6×10×0.55+m7×10×0.94=126.153(N·m)
膝关节处扭矩T2为
T2=m2×10×0.21+m3×10×0.42+m5×10×0.21+m7×10×0.40=28.455(N·m)
简易静力学分析如下:
在SolidWorks中建立模型并导入ANSYS中,设置材料属性、重力、外力及固定位置。分析结果如图5所示。
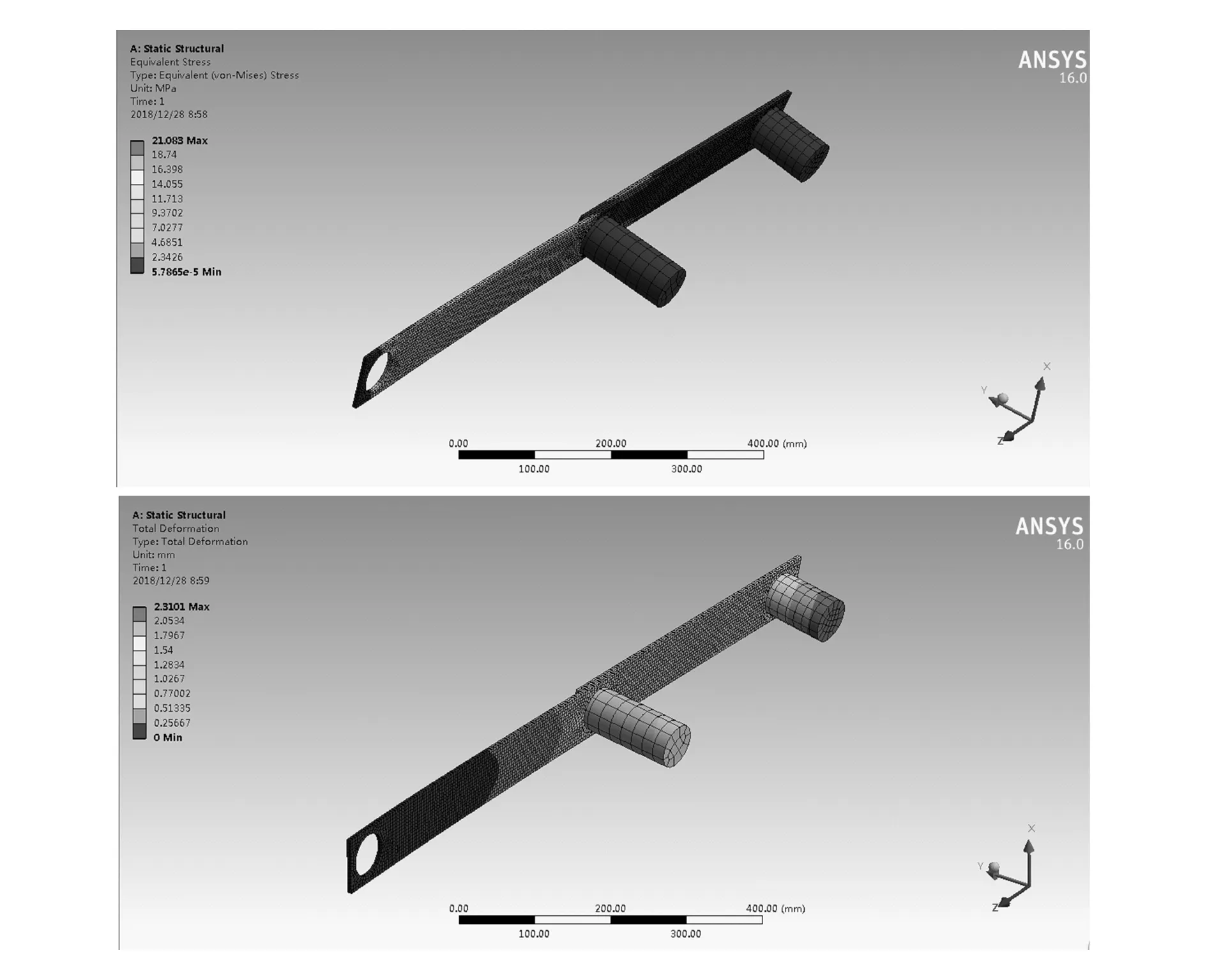
图5 分析结果
由图可知,最大位移为2.3 mm,最大应力为21.083 MPa,机器人能满足康复使用要求。
2 运动学和动力学分析
2.1 运动学分析
2.1.1运动学方程的建立
机器人结构简图如图6所示。本文采用D-H法[7]对机器人系统进行运动学分析,在机器人的每个连杆上都固定一个坐标系,如图7所示,用4×4的齐次变换矩阵来描述相邻两连杆的空间关系,则该4自由度的脑卒中下肢康复机器人的运动学方程TH为:
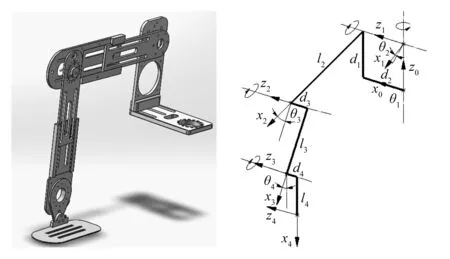
图6 结构简图 图7 坐标系图
(1)
式中:A1,A2,A3,A4为各连杆对应的变换矩阵;nx,ny,nz为机械臂末端坐标系的X轴在基坐标系中的方向矢量;ox,oy,oz为机械臂末端坐标系的Y轴在基坐标系中的方向矢量;ax,ay,az为机械臂末端坐标系的Z轴在基坐标系中的方向矢量;px,py,pz为机械臂末端在基坐标系中的坐标。
2.1.2运动学仿真[8]
采用基于MATLAB下的Robotics Toolbox机器人工具箱对下肢康复机器人进行运动学可视化计算仿真,仿真结果如图8所示。通过调节各关节转角变量θ1,θ2,θ3,θ4的值,可以得到机器人的运动状态。
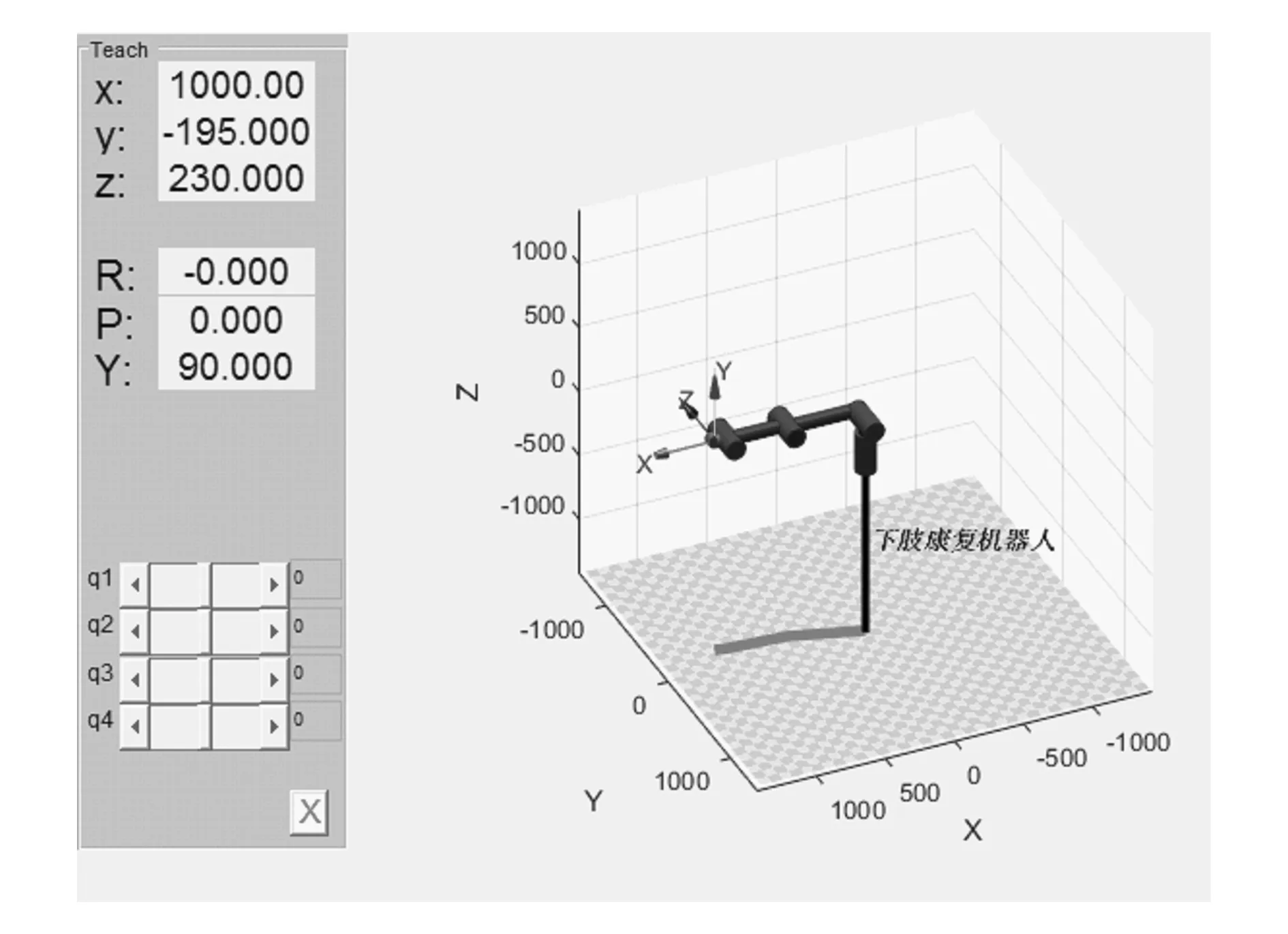
图8 仿真结果
输入θ1=θ2=θ3=θ4=0°可以确认解的正确性。
2.2 动力学分析
2.2.1动力学方程的建立
采用拉格朗日法对脑卒中下肢康复机器人系统进行动力学分析。
动力学的普遍方程为:

(2)
2.2.2动力学仿真[9]
在SolidWorks中建立简化模型三维图,机器人工作时需带动患者的腿部进行康复训练,故仿真关节扭矩时需考虑人腿的质量,本文取大腿质量m1为17 kg,小腿质量m2为5 kg,脚质量m3为2 kg,仿真时将人腿的质量平均分布于对应的连杆上。建模后三维图及质量属性如图9,10所示,仿真结果如图11所示。
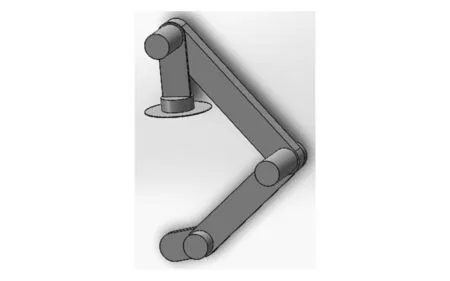
图9 康复机器人简化模型三维图
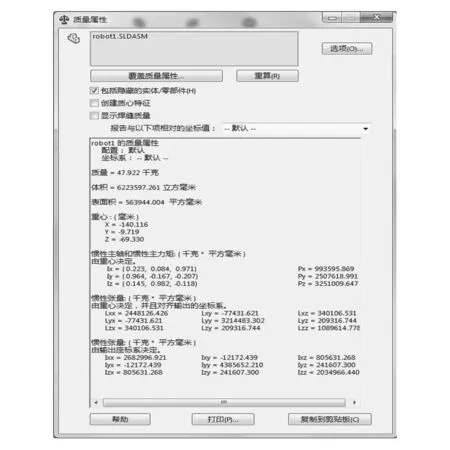
图10 康复机器人简化模型质量属性
机械臂在运动过程中惯性较大,为了保证机械臂能够平稳运行,需要研究运动过程中机械臂各个连杆动能的变化情况,从图11中可以看出,在运行过程中各个关节运行平稳,没有出现大的突变,符合工作要求。
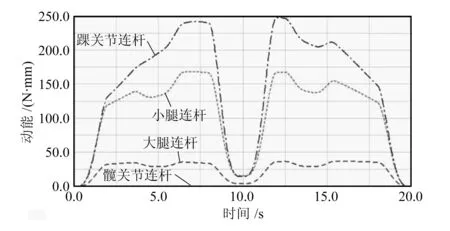
图11 各连杆动能变化曲线
3 结束语
本文针对脑卒中的下肢运动功能障碍患者对康复训练的要求,从人体下肢运动机理出发,完成了一款具有4个自由度的脑卒中下肢康复机器人的设计。
通过机器人的运动学及动力学建模与仿真,得出4个关节处的动能数据,为动力传递方式的设计提供了理论依据,优化了机器人结构,保证了康复训练的安全性。
