行人违规的跟踪与行为预测
2020-12-28李鑫帅赵翼康曲晓轩卞建鹏
李鑫帅 赵翼康 曲晓轩 卞建鹏

摘 要:研究行人违规的跟踪与行为预测问题,为降低行人违规率和伤亡人数,通过中值滤波法,抑制噪声的干扰,并通过背景差法,分离背景区域与运动区域,将运动的行人区域检测出来。运用基于颜色匹配和模板匹配的目标跟踪算法,对FPGA开发板安装相关编程和相应环境搭建,把软件实现的检测算法加到开发板中,可有效达到行人违规的跟踪与行为预测的目的。
关键词:行人违规;背景差分;中值滤波;颜色匹配;模板匹配;FPGA
中图分类号: TP18 文献标识码:A
文章编号:1009-3044(2020)31-0222-02
Abstract: The tracking and behavior prediction of pedestrian violations were studied. To reduce the rate of pedestrian violation and the number of casualties, the median filtering method was used to suppress the interference of noise, and the background difference method was used to separate the background area from the moving area to detect the moving pedestrian area. By using the target tracking algorithm based on color matching and template matching, the FPGA development board is installed with relevant programming and the corresponding environment is built, and the detection algorithm realized by the software is added to the development board, which can effectively achieve the purpose of pedestrian violation tracking and behavior prediction.
Key words: pedestrian violation; background difference; median filtering; color matching; template matching; FPGA
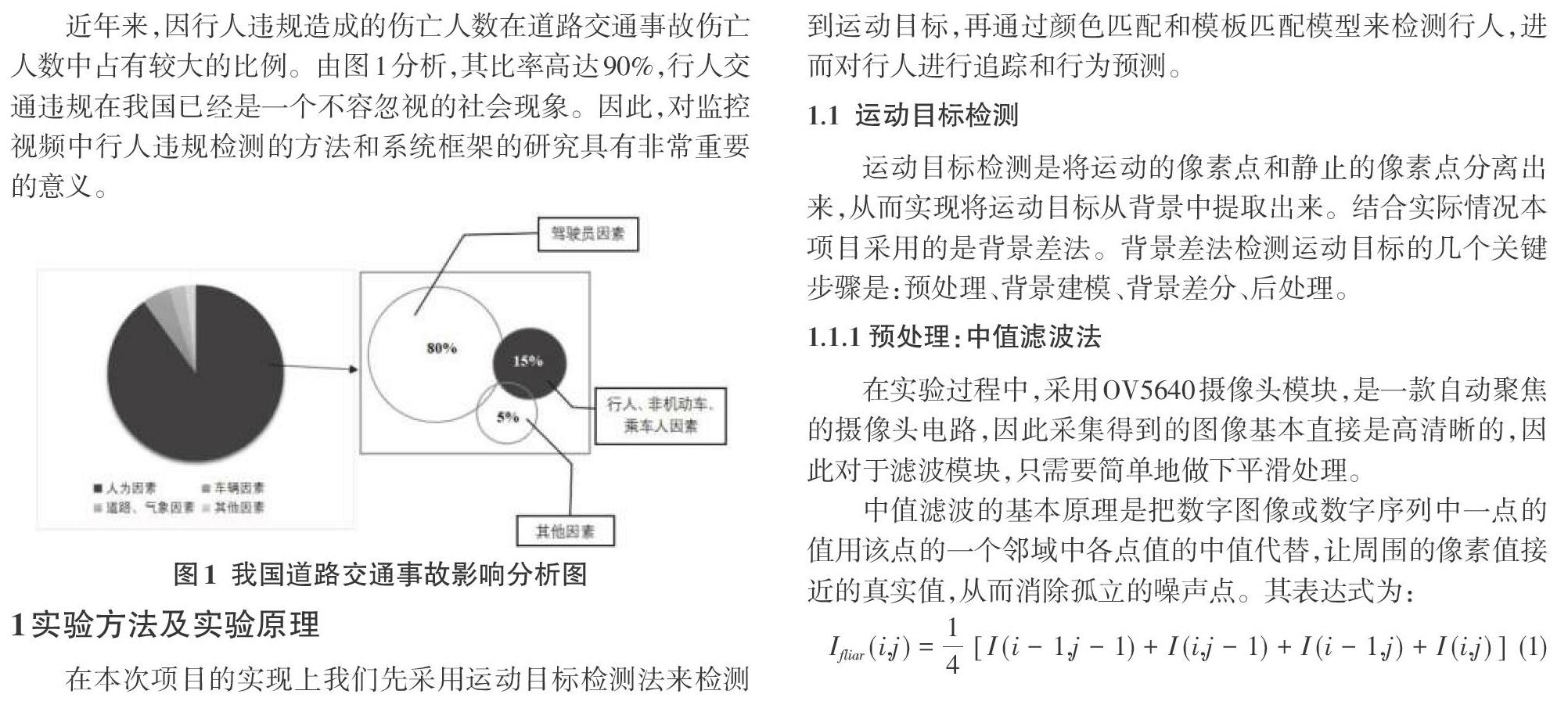
近年来,因行人违规造成的伤亡人数在道路交通事故伤亡人数中占有较大的比例。由图1分析,其比率高达90%,行人交通违规在我国已经是一个不容忽视的社会现象。因此,对监控视频中行人违规检测的方法和系统框架的研究具有非常重要的意义。
1实验方法及实验原理
在本次项目的实现上我们先采用运动目标检测法来检测到运动目标,再通过颜色匹配和模板匹配模型来检测行人,进而对行人进行追踪和行为预测。
1.1 运动目标检测
运动目标检测是将运动的像素点和静止的像素点分离出来,从而实现将运动目标从背景中提取出来。结合实际情况本项目采用的是背景差法。背景差法检测运动目标的几个关键步骤是:预处理、背景建模、背景差分、后处理。
1.1.1 预处理:中值滤波法
在实验过程中,采用OV5640摄像头模块,是一款自动聚焦的摄像头电路,因此采集得到的图像基本直接是高清晰的,因此对于滤波模块,只需要简单地做下平滑处理。
中值滤波的基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近的真实值,从而消除孤立的噪声点。其表达式为:
通过这个处理方式,可以抑制部分像素点的像素突变情况。[I(i,j)]表示坐标为[i]和[j]的像素值。[Ifliar]为滤波输出后的像素值。
1.1.2 背景建模
本系统中要建立的背景模型主要受天气影响。为确保运动目标检测的准确性,该模块选择基于统计的背景相减法来获取背景,同时还运用了大津法以最大限度地减小了目标被错认为是背景的概率。背景差分是通过视频当前帧减去背景参考帧,然后对所的图像选择合适的阈值二值化后,即得到完整的运动目标。设当前帧图Ii背景图像为B,背景差分二值图为:
这样,在差分二值图像的灰度值为255的像素点即可视为前景的运动目标点。为了取得更为精确的对象域,可运用形态学操作的方法对图像进一步处理。
1.2行人检测
通过对运动物体检测后,得到运动区域。但这个物体有可能是车辆或其他,因此我们需要对检测的运动物体进行进一步的分类。在本项目中,我们采用了RGB颜色匹配模型和模板匹配模型来完成行人检测。目标提取之后,需要对目标进行轮廓的标记,在FPGA中,具体的流程大概如下:
Step1:统计出目标区域的每一个像素点的坐标;
Step2:将坐标的前后左右坐标的最大值和最小值计算出来;
Step3:根据这些最大值和最小值,得到跟踪标记。
2硬件及其说明
在实际应用中目标检测技术有时需要移植到移动嵌入式设备当中,需要达到能够实现实时性的目标检测效果。经过反复对比后我们选择了FPGA系列的ax545这一开发板,使用者可以通过烧入配置文件的方式来自己定制电路。将目标检测算法和FPGA开发板相结合,可以大大改善目标检测在嵌入式端的实际应用现状。
3实验结果与分析
本文对FPGA开发板安装相关编程和相应环境搭建,把软件实现的检测算法加到开发板中,实现了对行人违规的跟踪与行为预测。如图5所示,为视频中的目标人物,对基于匹配的跟踪方法进行编程,使有效实现目标跟踪,如图6所示。最后可实现对目标人物进行提取,如图7所示,黑色部分为背景区域,白色部分为目标区域。
4结语
本文运用基于颜色匹配的跟踪方法快速准确地跟踪目标人物。具体实现上,对视频序列综合使用多种形态学方法检测目标位置,再对目标采样点进行颜色匹配,接着用模板匹配进行完善,最终根据匹配结果显示跟踪结果。通过此方法,可实现公共场所的快速准确跟踪,对降低行人违规率和因人为因素导致的伤亡人数有重大意义。
参考文献:
[1] 曹燕,陈玉婷,曾晓珊.基于颜色匹配的密集多目标快速跟踪算法[J].计算机仿真,2012,29(8):230-234.
[2] Bouwmans T.Subspace learning for background modeling:asurvey[J].Recent Patents on Computer Sciencee,2009,2(3):223-234.
[3] 张艳楠.图像处理中的中值滤波及其改进[J].中国新通信,2018,20(2):230-231.
[4] Kryjak T,Komorkiewicz M,Gorgon M.Hardware implementation of the PBAS foreground detection method in FPGA[C]//Proceedings of the 20th International Conference Mixed Design of Integrated Circuits and Systems - MIXDES 2013.June20-22,2013,Gdynia,Poland.IEEE,2013:479-484.
[5] 湯露,程姝.基于FPGA的实时中值滤波算法硬件设计[J].工业控制计算机,2018,31(2):20-22.
【通联编辑:唐一东】
