深层搅拌船施工过程自动匹配控制技术
2020-12-28黄宗锐潘永军周昭旭
黄宗锐,潘永军,周昭旭
(中交疏浚技术装备国家工程研究中心有限公司,上海 201208)
0 引言
在海洋地基处理工程技术领域,深层搅拌船(DCM船)利用水泥作为固化剂的主剂,通过处理机搅拌翼在海洋地基深部就地将软土和固化剂强制拌和,使软土硬结而提高地基强度[1]。DCM工法[2]广泛应用于海洋地基加固,具有工期短、地基强度高、绿色环保、施工质量可靠的优点[3]。随着环保要求的提高,DCM工法已成为港口建设、海上机场、垃圾堆场和人工岛屿等设施地基处理的主要工法之一[4]。
DCM船是集锚泊定位、深层水泥浆搅拌、智能化施工管理、船舶自动调倾系统等技术于一体的高技术、高附加值的重大技术装备[5],到目前为止世界上的深层搅拌船主要集中在日本,韩国的深层搅拌船多为挤密砂桩船改造而成,施工能力及质量和日本深层搅拌船有很大的差距,其它国家很少有深层搅拌船的运用。日本此项技术由DCM研究会掌握,禁止对外公布。日前由中交疏浚集团组织国内有关单位联合设计、建造的国内首艘重型双处理机DCM船已在香港机场三跑道项目中开始进行施工应用[6]。其中本文论述的新研发的智能化施工管理系统打破了日、韩等国在该领域的技术垄断,填补了国内空白。且日本的施工管理只能实现半自动化,施工过程仍需要大量人为干预,而本文论述的施工管理系统不仅可以实现全自动化,还可以实现在施工过程中搅拌次数、喷浆流量和升降速度等关键参数的智能化自动匹配。
1 研究背景
DCM船施工过程实际上就是使用搅拌翼将水泥浆和软土强制拌和,因此水泥浆量和拌和的均匀程度直接关乎到搅拌桩的强度,单位长度的喷浆量由喷浆流量表示,而搅拌的均匀程度由搅拌次数决定,因此喷浆流量和搅拌次数就成为决定最后成桩质量的关键参数。出于成本考虑,喷浆量也需达到施工工艺要求的最小水泥用量,注浆过程中不能有断浆现象。搅拌次数越多,拌和越均匀,成桩质量也越好,但施工时间也越长,效率不高。而处理机的升降速度又直接影响到施工效率,因此如何既保证成桩质量,又提高施工效率,即智能化的自动匹配施工过程中搅拌次数、喷浆流量和升降速度等关键参数就成为在工程实践中探索的一个课题。为此,本文提出了自动匹配控制技术。
2 自动匹配控制技术
本文提出的自动匹配控制技术包括搅拌次数与升降速度自动匹配控制和喷浆流量与升降速度自动匹配控制。
2.1 搅拌次数与升降速度自动匹配控制
2.1.1 控制系统构成
搅拌次数与升降速度自动匹配控制的系统构成框图如图1所示。

图1 搅拌次数与升降速度自动匹配技术控制系统框图Fig.1 Block diagram oftechnicalcontrolsystem for automatic matching ofstirring times and lifting speed
2.1.2 自动匹配控制过程
在施工管理系统软件中设置施工各阶段的搅拌速度和处理机的升降速度。在搅拌翼自动控制模式+处理机升降绞车自动控制模式下,施工控制系统按照参数设置全自动执行。根据施工要求,单位长度的搅拌次数N≥Ns,其中Ns为施工要求设定值。而为桩的长度;R为搅拌翼转速;V为绞车升降速度;n为搅拌翼个数,故拌翼搅拌速度或升降绞车速度异常时,自动按照上述公式调整搅拌翼或升降绞车相应命令,使搅拌次数满足施工要求。当搅拌翼旋转速度和处理机升降绞车速度均与施工参数不一致时,优先调整搅拌翼旋转速度。搅拌翼自动匹配调节流程见图2,绞车升降速度自动匹配调节流程见图3。

图2 搅拌次数自动匹配调节流程图Fig.2 Flow chartofautomatic matching adjustment ofstirring times

图3 绞车升降速度自动匹配调节流程图Fig.3 Flow chart ofwinch lifting speed automatic matching adjustment
2.2 喷浆流量与升降速度自动匹配控制
2.2.1 控制系统构成
喷浆流量与升降速度自动匹配控制的系统构成框图如图4所示。
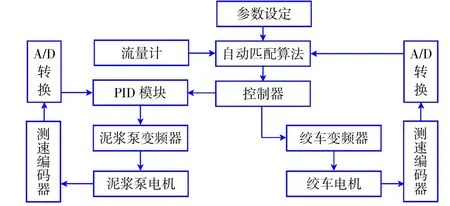
图4 喷浆流量与升降速度自动匹配技术控制系统框图Fig.4 Block diagram oftechnicalcontrolsystem for automatic matching ofshotcrete flow rate and lifting speed
2.2.2 自动匹配控制过程
每一根搅拌桩都有具体的喷浆量要求Ls和桩长D,故设定喷浆流量Fs为根据泥浆的转速与流量的实际对应关系可以将喷浆流量换算成泥浆泵的转速。在施工管理系统软件中设置施工各阶段的泥浆泵转速和处理机的升降速度。在搅拌翼泥浆泵自动控制模式+处理机升降绞车自动控制模式下,施工控制系统按照参数设置全自动执行。由于施工要求喷浆流量需尽量稳定,因此对泵速的调节采用位置式PID算法[7]控制。位置式PID算法[8]是数字PID的一种,其原理是将传统模拟PID中的积分项和微分项进行离散化处理:以T作为采样周期,k作为采样序号,则离散时间kT近似连续时间t,用矩形法数值积分近似代替积分,用一阶后向差分近似代替微分,可以得到数字PID的表达式为:

式中:k为采样序号,k=0,1,2,…;Uk为第k次采样的输出值;ek为第k次采样的输入偏差值;ek-1为第k-1次采样的输入偏差值;Kp为比例系数;Ki为积分系数;Kd为微分系数。
在施工过程中,根据匹配算法换算出的泵转速指令通过PID算法调节实际泵的转速,PID的参数整定通过经验法[9]调试确定,保证喷浆量满足要求以此确保成桩质量,确保软基处理的效果。
3 调试和结果
本文提出的方法应用于中交海建DCM船DCOC-1与DCOC-2,以下结合实船参数和试验桩的具体参数进行说明。DCOC-1共有搅拌翼5个,试验桩桩长21 m,喷浆总量12 671.2 L,搅拌次数不低于450次/m。结合土质情况和设备能力对搅拌桩每米的搅拌翼转速和绞车升降速度进行设置,并设置了420个采样点(即20个/m),在施工过程得到的匹配关系曲线如图5所示。根据桩长和喷浆总量经过计算得到合适的喷浆流量,进行设置后,在施工过程得到的匹配关系曲线如图6所示。

图5 搅拌翼转速与升降速度自动匹配曲线Fig.5 Automatic matching curve of the rotating speed of agitator wing and lifting speed

图6 喷浆流量与升降速度自动匹配曲线Fig.6 Automatic matching curve ofthe shotcrete flow rate and lifting speed
从图中可以看出,在自动匹配控制技术控制下,DCM船关键施工参数搅拌次数与升降速度、喷浆流量与升降速度均持续保持在理想的匹配状态,满足施工成桩要求。综合总体施工数据,每根桩的施工时间相较于人工控制平均减少15 min。
4 结语
本文提出的自动匹配控制技术可以在DCM船施工过程中智能化的自动匹配搅拌次数、喷浆流量和升降速度等关键参数,既保证了施工质量,又不降低施工效率。在DCOC-1及DCOC-2深层搅拌船上已经成功应用1 a多,在香港新机场三跑道项目中施工完成了数千根搅拌桩,从实际应用的效果看,该控制技术不但有效而且十分稳定。在以后DCM施工管理系统中可以进一步的得到应用和发展。
