反潜机磁探仪跟踪航路规划建模与仿真*
2020-12-26高青伟刘首善
吴 芳,吴 铭,高青伟,刘首善
(1.海军航空大学,山东 烟台 264001;2.解放军92697 部队,海南 陵水 572400)
0 引言
目前国内外对反潜巡逻机磁探仪搜潜技术作了大量相关研究,但相关的公开文献并不多,大多是围绕磁探仪搜潜原理的定性描述,缺乏必要的模型支持和仿真验证[1]。
1 潜艇位置分布模型
潜艇位置和运动的不确定性,决定了对潜艇的搜索是一件随机事件,所以确定潜艇位置散布规律,必须依据执行任务时所具有的目标初始信息多少为原则。由于来自其他信息源的潜艇位置数据具有很大的不确定性,根据中心极限定理,可以认为潜艇初始位置服从二维正态分布。从获得潜艇位置初始信息,到反潜兵力到达搜索区域时,潜艇的位置以初始位置散布为中心、以原航行速度继续扩大。位置散布区域大小与潜艇的速度和搜索延迟时间有关。因此,潜艇当前位置散布应包含初始散布和运动不确定性引起的散布两部分[2]。

2 磁探仪跟踪潜艇航路规划模型
2.1 磁探仪八字形跟踪潜艇航路规划模型
图1 八字形跟踪航路示意图
根据磁探仪八字形跟踪示意图,整个跟踪过程可以分为以下两个部分:
1)反潜机从初始位置点P1飞往目标航向点P4

图2 反潜巡逻机飞往目标航向航路规划



其中,vs为反潜机跟踪速度。
2)八字形搜索航路
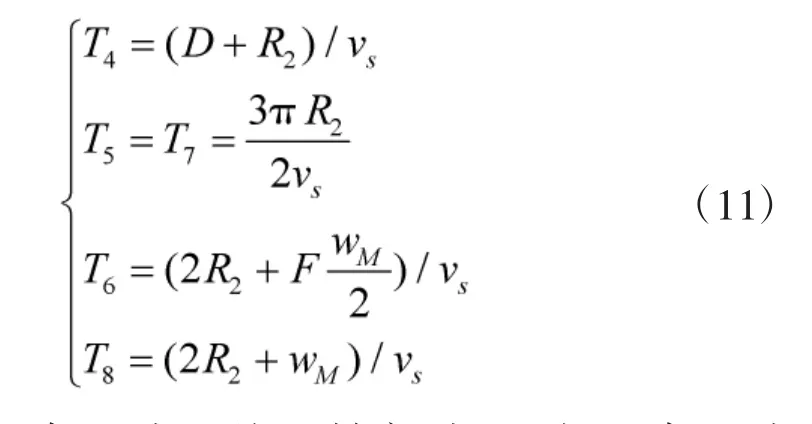
由图1 可知,反潜机先从目标概略位置[4]P4直飞到P5,接着从P5转弯到P6,再从P6直飞P7,接着从P7转弯到P8,其各段航路跟踪时间为:

航路规划中的直飞、转弯模型分别同于式(6)~式(8)。
2.2 磁探仪苜蓿叶形跟踪潜艇航路规划模型
磁探仪苜蓿叶形跟踪航路如图3 所示。
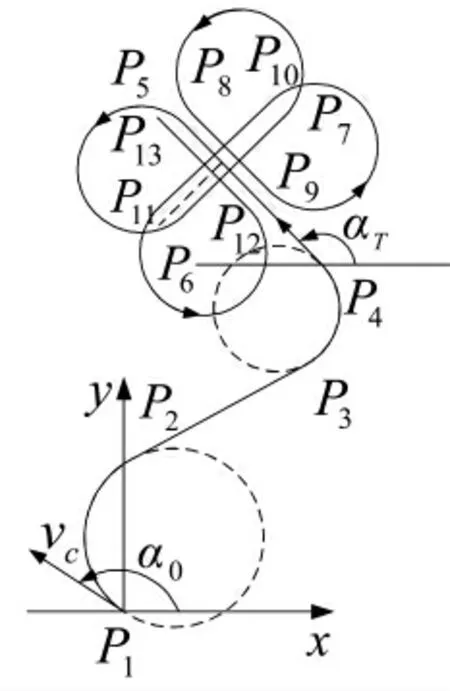
图3 苜蓿叶形跟踪航路示意图
根据磁探仪苜蓿叶形跟踪示意图,整个跟踪过程可以分为以下两个部分:
1)反潜机从初始位置点P1飞往目标航向P4点
航路规划模型同八字形跟踪。
2)苜蓿叶形搜索航路
由图3 可知,反潜机先从目标概略位置P4直飞到P5,接着从P5转弯到P6,再从P6直飞P7,从P7转弯到P8,从P8直飞到P9,再从P9转弯到P10,从P10直飞到P11,从P11转弯到P12,从P12直飞到P13,其各段航路跟踪时间[5]为:

其中,从P8直飞到P9,从P9转弯到P10,从P10直飞到P11,从P11转弯到P12,从P12直飞到P13,同式(10)。
2.3 磁探仪八苜形跟踪潜艇航路规划模型
磁探仪八苜形跟踪航路如图4 所示。

图4 八苜形跟踪航路示意图
根据磁探仪八苜形跟踪示意图,整个跟踪过程可以分为以下两个部分:
1)反潜机从初始位置点P1飞往目标航向P4点
其航路规划模型同八字形跟踪。
2)八苜形搜索航路
由图4 可知,反潜机先从目标概略位置P4直飞到P5,接着从P5转弯到P6,再从P6直飞P7,从P7转弯到P8,从P8直飞到P9,再从P9转弯到P10,从P10直飞到P11,从P11转弯到P12,从P12直飞到P13,其各段航路跟踪时间为:
其中,从P8直飞到P9,从P9转弯到P10,从P10直飞到P11,从P11转弯到P12,从P12直飞到P13,同式(11)。
3 磁探仪跟踪效能仿真分析
仿真比较磁探仪八字形、苜蓿叶形、八苜形跟踪方法在潜艇不同的初始位置散布、初始航向散布、经济航速、初始距离以及不同海洋磁噪声环境条件下的跟踪概率,来衡量磁探仪作战效能。设定仿真参数:反潜巡逻机初始位置(200,200)km,巡航速度600 km/h,初始航向300°,利用磁探仪搜潜搜索时的飞行速度为300 km/h,最大转弯坡度角30°,飞行高度取100 m,潜艇初始位置散布为1 km,常规潜艇的经济航速为10 km/h,潜艇下潜深度50 m,海域重力加速度为9.8 m/s2,三级海况时,磁探仪有效作用距离为500 m。
仿真1:磁探仪八字形、苜蓿叶形、八苜形跟踪航路
潜艇初始概略位置为(240,240)km,潜艇概略航向为300°,航向散布3°,初始位置散布为0.2 km。磁探仪八字形、苜蓿叶形、八苜形跟踪航路仿真结果如图5~图7 所示。

图5 八字形跟踪航路仿真
仿真2:潜艇初始位置对跟踪效能的影响
当潜艇初始位置散布为0.1 km~1 km 时,仿真结果如图8 所示。
仿真3:初始距离对跟踪效能的影响
潜艇初始位置为(200+d,200+d)km,当d 为10 km~100 km 时的仿真结果如图9 所示。
仿真4:潜艇经济航速对跟踪效能的影响

图6 苜蓿叶跟踪航路仿真

图7 八苜形跟踪航路仿真
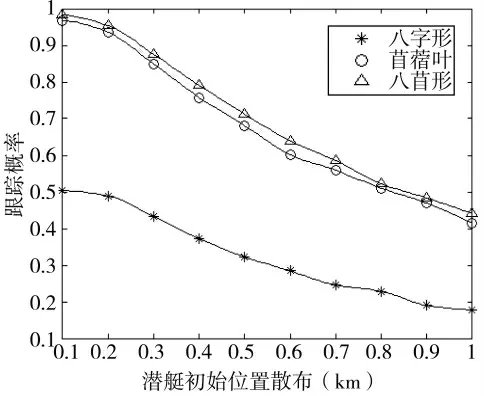
图8 初始位置散布对跟踪效能的影响

图9 初始距离对跟踪效能的影响
当潜艇经济航速为6 km/h~36 km/h 时的仿真结果如下页图10 所示。
仿真5:潜艇航向散布对跟踪效能的影响
图10 潜艇经济航速对搜潜效能的影响
潜艇初始位置散布为0.2 km,当潜艇航向散布为1~10°时的仿真结果如图11 所示。
图11 潜艇航向散布对搜潜效能的影响
仿真6:海洋环境磁噪声对跟踪概率的影响
当海洋环境磁噪声为0.01~0.09 nT 时,仿真结果如图12 所示。
以上仿真结果表明:相同条件下,八苜形的跟踪概率最高,且受潜艇初始航向散布和初始距离影响相对较小,但受潜艇初始位置散布、潜艇经济航速以及海洋大气环境影响较大。因此,只有在较准确地知道潜艇的初始位置,潜艇经济航速较低,海况较低时才能利用磁探仪有效对潜跟踪;在实际跟踪潜艇中,采用八苜形能获得较高的跟踪效能。
图12 海洋环境磁噪声对搜潜效能的影响
4 结论
目前,关于航空磁探仪对潜跟踪航路规划建模与仿真研究的相关资料较少,较多是关于航空磁探仪的战术战法研究,缺少相关的理论模型及仿真验证。基于此,本文结合航空磁探仪对潜艇跟踪的战术要求,建立了磁探仪八字形、苜蓿叶形、八苜形跟踪潜艇航路规划模型,仿真分析了初始距离、潜艇初始位置散布、潜艇初始航向、潜艇航速、海洋磁环境等对磁探仪不同航路跟踪潜艇效能的影响。由仿真结果可知:八苜形能获得较高的跟踪效能。
