动态雕塑机械驱动装置结构优化
2020-12-25田永刚张卫东
田永刚,张卫东
(1.太原学院,山西 太原 030032;2.山西大学,山西 太原 030006)
1 引言
动态雕塑是实现空间运动或空间位置移动的雕塑,雕塑运动技术可以实现雕塑运动[1]。雕塑运动形式通常包括水平旋转、垂直移动和水平移动等。随着人民生活水平的提高以及科技的发展,动态雕塑在城市规划、旅游开发和地产开发中被广泛应用[2]。在增加旅游收入和提升城市形象等方面,动态雕塑具有重要作用,在带来良好经济效益同时也提升了社会效益。但目前可以借鉴的产品较少,大行动、大负载的动态雕塑数量较少,动态雕塑普遍存在动作单一问题[3]。动态雕塑周围经常存在大量游客,所以对动态雕塑的可靠性和安全性提出较高要求。通过动态雕塑机械驱动装置结构优化设计可靠性和安全性高的动态雕塑,并将其应用在旅游景区中,不仅能够提升城市形象,还能为旅游景点吸引游客[4]。
该领域相关人员也进行了大量研究,在传统动态雕塑机械驱动装置的基础上对动态雕塑机械驱动装置结构进行优化设计,为动态雕塑领域奠定了基础。
2 动态雕塑机械驱动装置结构
2.1 回转装置
回转装置具有重量轻、承载能力好、刚性强、运转平稳等特点,可以承受较大的轴向力、径向力和倾翻力矩。设计的回转装置主要由回转台、回转支承和回转基座三部分组成。回转装置结构,如图1 所示。

图1 回转装置图Fig.1 Diagram of Turning Device
回转台是一种工字形断面环梁结构,其作用是对动态雕塑和升降装置进行支撑;回转支承是驱动系统中的重要部件,由齿圈、座圈、滚动体等组成,具有承受能力强、结构稳固等特点,其作用是将动态雕塑和升降装置传给回转基座;回转基座是一种圆形结构,能够支撑起全部升降装置。通过立式电动机和行星齿轮减速机传动,使回转驱动装置呈对称分布状态,是因为立式电动机利用液力祸合器使行星齿轮减速,再通过小齿轮与基座上的大齿轮相啮合,带动雕塑回转基座运行。
2.2 花瓣开合装置
由于动态雕塑在运行时,花瓣同时进行开合运动,所以动态雕塑在运行的过程中不能与各运动装置产生干涉,而在设计开合装置时还要考虑升降的协调性,保证动态雕塑的平稳运行和安全运行,由此花瓣开合装置是开合机构的重要工作模块之一,能够对花瓣开合的工作性能造成影响。传统开合装置的缺点:开合力系数大、成本昂贵、使用复杂等,在传统开合装置的基础上设计一种开合力系数小、成本廉价,且美观、简单的花瓣开合装置,如图2 所示。

图2 花瓣开合装置Fig.2 Petal Opening and Closing Device
由图2 可知,花瓣开合装置由花瓣、花瓣连接框架、花瓣支架、液压缸、液压安装台和防水塔组成。防水塔的形状为圆筒形,在防水塔的上方安装6 只花瓣和能够驱动花瓣开合的液压缸,在防水塔的内部安装能够驱动花瓣开合的液压传动,能够促使液压缸活塞牵引花瓣进行上下运动,保证了动态雕塑在运行过程中的的平稳性和可靠性。
2.3 升降装置
动态雕塑升降装置主要由齿轮齿条升降结构模块、固定结构模块和安全辅助部件构成。齿轮齿条升降结构模块它支撑着全部荷载,能够直接影响升降装置的工作性能,保证动态雕塑机械是否能够平稳运行;固定结构模块的作用是辅助升降装置支撑,其利用高强度螺栓与回转台相连,防上升降装置发生移动,为升降装置起到保护作用;安全辅助部件能够保证动态雕塑机械驱动系统安全工作,防止意外发生。升降装置内部结构,如图3 所示。
根据图3 可知,升降装置内部结构主要由齿条、齿轮、导轮1、导轨1、雕塑连接模块、导轮2、导轨3、导轮3、固定结构模块和升降结构模块组成。由于动态雕塑在运行过程中会发生自身晃动,导致动态雕塑偏载,造成刚性冲击现象,因此为安全起见和避免刚性冲击的危害,设计了三种导轮,以防止雕塑发生晃动而引起偏载现象发生,在导轮和导轨间添加压缩弹簧,如图4 所示。

图3 升降装置内部结构Fig.3 Internal Structure of Lifting Device

图4 导轮结构Fig.4 Guide Wheel Structure
2.4 电动机装置
交流异步电动机可以实现调速控制,保证动态雕塑平稳运行,与直流电动机和交流同步电动机相比,是结构最简单、最牢固的,降低了故障率,减少维护工作量,提高运行可靠性。交流异步电动机顾名思义是以异步工作方式存在的,较交流同步电动机操作简单,弥补了同步控制的缺点,由此,采用了380V/50Hz 的YZE-132M-4 电磁制动三相异步电动机设计动态雕塑机械驱动装置结构,从根本上改进了动态雕塑机械驱动运行平稳性能,如图5 所示。

图5 电磁制动三相异步电动机Fig.5 Electromagnetic Braking Three-Phase Asynchronous Motor
2.5 变频器装置
在对变频器装置进行设计时,要考虑电动机的额定功率,将电动机实际电流值作为依据,但是在动态雕塑运行过程中,变频器会因选择不当而温度过高,导致发动机使用寿命下降,因此在选择变频器时应适当留有余量[5-6],根据选取的YZE132M-4 电磁制动三相异步电动机,其过载力矩一般为2.5 倍,为了发挥电动机的过载性能,将变频器的容量提高到20%左右,即提高了动态雕塑瞬时过载能力,因此,选择D 型MM440 变频器,其参数设置,如表1 所示。

表1 变频器参数设置Tab.1 Parameter Setting of Frequency Converter
2.6 电路保护装置
电路保护装置需要熔断器和断路器两种保护器件进行保护,如果在运行时,电流过大,熔断器会迅速熔断,并切断电源,保护电路;而断路器具有短路检测、故障检测等功能,如果电路发生异常,断路器会脱扣,断开动态雕塑机械驱动的电路,从而对电动机和变频器起到了保护作用[7-9]。控制电路简图,如图6 所示。

图6 控制电路简图Fig.6 Control Circuit Diagram
3 基于矢量控制的装置结构优化
通过矢量控制对装置结构进行优化,从而提升动态雕塑机械驱动的性能。动态雕塑机械三相交流电通过3/2 变化等效为两相的交流电,在励磁方面交流电在变换前后等效[10],三相电与两相电之间用旋转坐标系代替两相静止坐标系,即:

转子、定子在旋转坐标系下电压为:


式中:r1—定子电阻;r2—转子电阻;M—转子和定子之间存在的互感;p—微分算子;L1—起动转矩;ω1—旋转磁场角度;ωr—转子转速;L2—负载转矩。
当电动机的起动转矩L1大于负载转矩L2,且控制电压在变频器三相交流电压输出电压范围内,有功功率控制在(15~22)kW范围内时,使转子磁链在理想矢量控制情况下恒定,可以将上式简化为下式:

电动机的定子励磁电流转子磁链、转矩方程、转差频率和磁链方程之间的关系为:

式中:P—磁极对数;Tr—转子绕组电磁时间常数;ψ2—转子磁链;ωs—转差角速度。
通过上述动态调整数学模型,实现动态雕塑机械驱动驱动装置结构的优化。
4 实验结果与分析
4.1 实验环境与参数设置
为了验证动态雕塑机械驱动装置结构优化的整体有效性,进行一次仿真实验分析,本次实验在Simulink 平台中完成,采用Windows xp 系统,其运行内存为8GB,CPU 为3.6 GHz。动态雕塑机械驱动系统模型,如图7 所示。
图7 动态雕塑机械驱动系统模型Fig.7 Dynamic Sculpture Mechanical Drive System Model
在上述实验环境下,对动态雕塑机械驱动系统模型进行参数设置,设定驱动电压为220/V,仿真时间为30/min,仿真步数为200 步,液压缸运行速度小于1000/mm/s。根据参数设置,对优化后的动态雕塑机械驱动装置结构和优化前的动态雕塑机械驱动装置结构进行实验对比分析。
4.2 回转角加速度
由于转角加速度对回转制动冲击具有一定影响,由此为了验证动态雕塑机械驱动装置结构中回转装置的动态性能,利用动态雕塑机械驱动装置结构优化方法对回转角加速度进行验证,回转角加速度越小,制动冲击越小,回转角加速度曲线波动,如图8所示。

图8 回转角加速度曲线波动Fig.8 Return Angle Acceleration Curve Fluctuation
根据图8 可知,设计的回转角加速度曲线波动较小,回转装置运行平稳、无较大的冲击。说明设计的回转装置合理可行。
4.3 输出电压
为了验证设计方法的有效性,对优化后的动态雕塑机械驱动装置结构和优化前的动态雕塑机械驱动装置结构的输出电压进行对比分析,对比结果,如图9 所示。
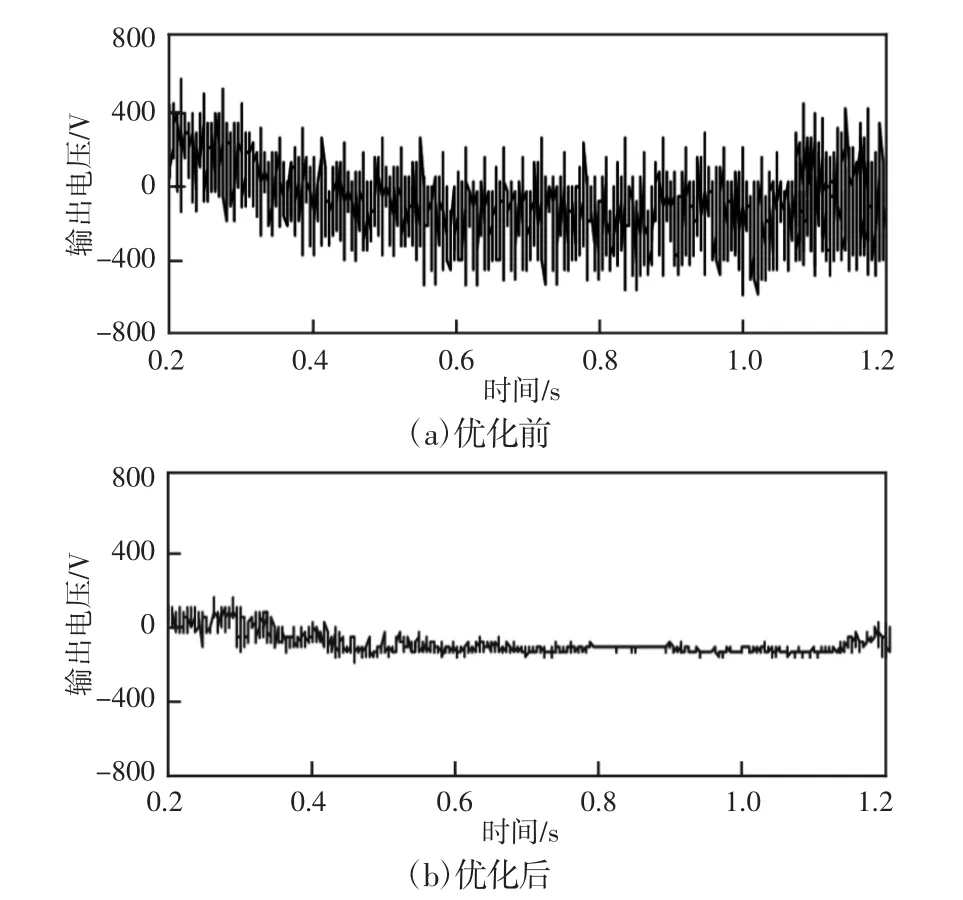
图9 输出电压对比结果Fig.9 Output Voltage Comparison Results
根据图9 可知,优化后的动态雕塑机械驱动装置结构的输出电压比优化前的输出电压平稳,说明设计的动态雕塑机械驱动装置结构优化后的驱动性能较好。
4.4 有功功率
为了进一步验证设计方法的有效性,对优化后的动态雕塑机械驱动装置结构和优化前的动态雕塑机械驱动装置结构的有功功率进行对比分析,对比结果,如图10 所示。
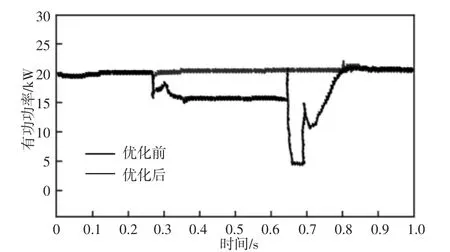
图10 有功功率对比结果Fig.10 Comparison Results of Active Power
根据图10 可知,优化后的动态雕塑机械驱动装置结构的有功功率比优化前的动态雕塑机械驱动装置结构的有功功率平稳,且控制在(15~22)kW 内,说明动态雕塑机械驱动性能较好。
5 结语
旅游事业的飞速发展,人们开始关注旅游景区的动态雕塑景观,动态雕塑的安全运行至关重要。为了提高动态雕塑机械驱动性能,提出并设计了动态雕塑机械驱动装置结构优化方法。
(1)通过设计回转装置、花瓣开合装置和升降装置、电动机装置、变频器装置和电路保护装置,保证动态雕塑的平稳运行和安全运行。
(2)利用矢量控制对装置结构进行优化,提升了动态雕塑机械驱动性能。
(3)设计的动态雕塑机械驱动装置结构优化方法,使回转角加速度曲线波动变小,输出电压平稳,有功功率能够控制在(15~22)kW 内,提升了动态雕塑机械驱动性能,为动态雕塑稳定运行提供保障。
