用多阈值多目标无人机图像分割优化算法检测秸秆覆盖率
2020-12-25刘媛媛孙嘉慧张书杰于海业王跃勇
刘媛媛,孙嘉慧,张书杰,于海业,王跃勇
用多阈值多目标无人机图像分割优化算法检测秸秆覆盖率
刘媛媛1,孙嘉慧1,张书杰1,于海业2,王跃勇3※
(1. 吉林农业大学信息技术学院,长春 130118;2. 吉林大学工程仿生教育部重点实验室,长春 130025;3. 吉林农业大学工程技术学院,长春 130118)
为了适应航拍采集秸秆覆盖图像大尺度处理需求,提高当前多阈值差分灰狼优化算法(Differential Evolution Grey Wolf Optimizer,DE-GWO)的图像分割质量和速度,提出一种用于检测秸秆覆盖率的图像分割优化算法。该研究借鉴了人工蜂群多目标灰狼优化算法(Artificial Bee Colony Survey Multi-Objective Grey Wolf Optimizer,AS-MOGWO),在DE-GWO算法中加入了多目标灰狼优化算法(Multi-Objective Grey Wolf Optimizer,MOGWO)的外部存档,引入多目标的概念,并添加了人工蜂群算法(Artificial Bee Colony,ABC)中观察蜂的搜索策略,提出了基于多阈值的多目标秸秆覆盖图像自动分割的优化算法(Differential Evolution Artificial Bee Colony Survey Multi-Objective Grey Wolf Optimization,DE-AS-MOGWO)。该算法不仅继承了DE-GWO算法的自动分割特性,还兼备AS-MOGWO算法的高效收敛性,提高了图像分割的准确性和处理速度。分析结果显示,在无外界影响的情况下,该研究提出的DE-AS-MOGWO优化算法与人工实际测量法匹配的误差可控制在8%以内。在算法性能方面,DE-AS-MOGWO相比于PSO(Particle Swarm Optimization)、GWO(Grey Wolf Optimizer)、DE-GWO和DE-MOGWO在平均匹配率上分别提高了4.967、3.617、2.188和3.404个百分点,平均误分率分别降低了0.168、0.131、0.089和0.116个百分点,而算法耗时分别降低了82%、84%、17%和32%。试验结果表明,多阈值多目标图像分割方法在大尺度无人机图像中可获得较好的分割效果,且针对不同秸秆覆盖率图像均具有普遍适用性,为大面积秸秆覆盖率检测以及其他相关图像检测提供了高效算法支持。
秸秆; 算法;灰狼优化算法;多阈值;多目标;观察策略;秸秆覆盖率
0 引 言
基于无人机采集图像进行秸秆覆盖率检测,有效利用无人机灵活的特点获取待测区域的完整图像,采用图像分割的方法简单、易行,亦为监督作物长势[1-3]、预估作物产量[4]等提供了图像和方法依据。因此,针对无人机航拍采集图像,开发高效的智能算法来检测秸秆覆盖率成为了当务之急。
针对航拍图像秸秆覆盖率检测,目前已有的差分灰狼优化算法(DE-GWO)[5]是一种将灰狼优化算法(Grey wolf optimizer,GWO)[6]和差分进化算法(Differential evolution,DE)[7-10]相结合的一种高效的多阈值图像分割优化处理方法,该算法可以有效地解决传统灰狼优化算法易于陷入局部最优和处理速度较慢等特点,实现航拍图像的多阈值分割[11]。但是,实际应用中,基于航拍的秸秆覆盖采集图像尺寸较大,图像处理速度和处理效果往往不能同时令人满意,因此,亟待寻求一种兼容处理效果和耗时较短的图像智能分割算法。
多目标灰狼优化算法(Multi-Objective Grey Wolf Optimizer,MOGWO)[12]是在灰狼优化算法(GWO)中加入了一个外部存档Archive,用该存档来保存或检索灰狼所获得的非支配的Pareto最优解[13],然后利用该存档来定义狼群的社会层次结构,模拟多目标空间[14]中灰狼的狩猎行为,进而对所拥有多个不同解的问题中的各个解之间能够进行协调处理,使所有目标尽可能达到最优。MOGWO算法不仅继承了传统灰狼优化算法的特点,而且拥有更快的收敛速度,实现了多目标优化,但容易陷入局部最优的缺陷[15]仍然有待改善。
本文将DE-GWO算法从单目标扩展到多目标DE-MOGWO,实现多目标优化,大大提升了多阈值图像分割的准确度,增强了算法对采集图像中不同的地物提取和分类[16],但是算法也拥有了MOGWO算法的容易陷入局部最优的缺陷[15]。人工蜂群算法(Artificial Bee Colony,ABC)[17]是一种模拟蜜蜂采食行为提出的一种优化方法,该算法通过对所求问题的解进行优劣的比较,使群体中的全局最优解脱颖而出。为了进一步提高算法在秸秆覆盖率检测应用中图像自动分割的质量和处理速度,本文又借鉴了AS-MOGWO算法[15]通过在多目标灰狼算法中添加蜂群算法的观察阶段,以此来解决MOGWO算法不稳定、易陷入局部最优的缺点,从而增强算法稳定性和寻优能力的思维。在DE-MOGWO算法加入了人工蜂群算法[17-20]中观察蜂的观察策略,提出了改进的差分灰狼优化算法(Differential Evolution Artificial Bee Colony Survey Multi-Objective Grey Wolf Optimization,DE-AS-MOGWO),在质量和速度方面更加高效地解决秸秆覆盖率图像分割问题,使得检测效果进一步提高。
1 秸秆覆盖率检测设计方案
1.1 图像采集
图像采集来源于无人机实地高空俯视平行地面拍摄的田间现场图像。在无人机拍摄采集的图像中除秸秆和土壤外,还有杂草、杂物等因素的干扰,其中秸秆覆盖部分和杂草部分颜色极其接近,已还田的部分和土壤的颜色较为接近。杂草的识别可以进行作物下一周期的针对性处理,提高土地的养分利用率和生长空间,达到稳产、增产的作用,也可以根据用户需求将杂草和秸秆部分合并计算覆盖率,如图1(部分截取)。
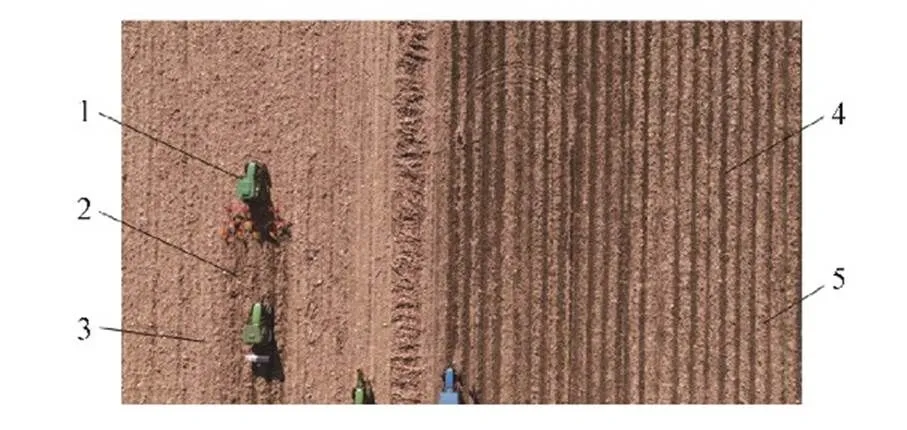
1.农具 2.秸秆 3.已耕作土地 4.土壤 5.杂草
1.2 检测目标
利用无人机拍摄获取的田间秸秆图像,结合秸秆覆盖率现场复杂情况及图像灰度直方图的特点,设计算法寻求最优阈值,利用该阈值来对图像进行分割,快速准确地将感兴趣区域进行分割,并计算出各部分像素点个数,利用秸秆部分的像素点个数与图像总像素点的个数比来求得秸秆的覆盖率[5],如公式(1)。
本文提出DE-AS-MOGWO算法来对所得秸秆覆盖图进行分割,并利用形态学算法[21-22]对图像分割出的各部分进行提取,再对秸秆覆盖的面积进行计算,秸秆覆盖率检测方法流程图如图2所示。
本文利用多阈值图像分割算法,可根据图像内容选择适当数量的阈值,对图像灰度级进行分类。因此,灰度级范围在相同阈值区域内时,光照等外界条件不影响检测结果。
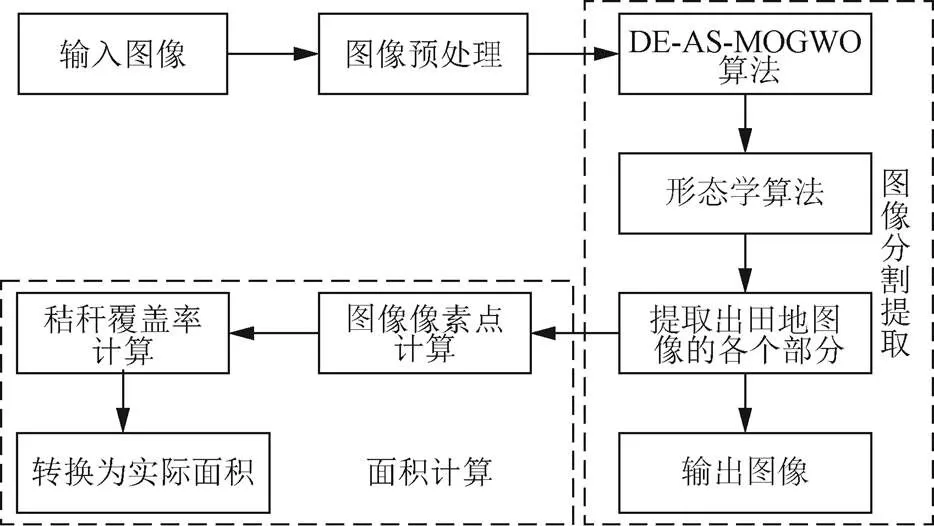
图2 秸秆覆盖率检测方法流程图
此外,利用无人机现场拍摄的照片通常会受到采集设备等外界因素的影响,具有明显的噪声,直接影响图像分割的准确性,进而导致秸秆覆盖率检测结果的偏差。本文采用了基于频域的平滑滤波方法[23]对图像的亮度不均的问题进行修正,消除图像在数字化过程中的噪声,为后续的图像阈值分割做好准备。
2 多阈值多目标图像分割算法原理
2.1 DE-GWO算法原理
灰狼算法(GWO)[6]通过模拟狼群的狩猎行为来处理函数的优化问题,在狼群社会中有着严格的等级制度,从高到低依次为:头狼、探狼、猛狼和最低层次的狼。
灰狼算法的基本思想是:在某一待寻优空间中,选取其中适应度值最佳的狼作为头狼,在图像分割过程中即是最佳阈值。
由于田间实际图像干扰因素较多,且图像灰度级相近。本文选择可以推广到非广义系统的Tsallis熵[24-25]作为核心算法的适应度函数[5]。在确定了Tsallis熵后,使用灰狼算法让灰狼个体的位置不断迭代更新,并将当前位置的最好的前3个解分别标记为狼、狼和狼,将其他的解记为狼,在狼群狩猎的过程中,狼、狼和狼会领导整个狼群向目标猎物逼近,找到最优解。该过程可以用如下方程表示


DE-GWO算法[5]是在灰狼算法(GWO)算法[6]的基础上混入差分算法(DE)[7],DE算法流程类似于遗传算法,采用迭代方法逐步进化完成最优解的搜索过程,其中变异、交叉和选择操作增加了寻优的多向性、加快了收敛速度,解决了基本灰狼算法阈值局部最优的缺陷,加快了图像分割的处理速度。针对实际采集的田间秸秆图像处理颜色接近、图像信息量大的实际应用问题,DE-GWO算法从分割处理效果和处理速度较GWO算法明显占优势。
2.2 AS-MOGWO算法原理
AS-MOGWO算法是由崔明朗等[15]在多目标灰狼优化算法(Multi-Objective Grey Wolf Optimizer,MOGWO)[12]的基础上通过借鉴人工蜂群算法(Artificial Bee Colony,ABC)[17]中的观察蜂的观察策略,提出的一种改进型优化算法。通过在多目标灰狼算法中添加狼群的观察阶段,和对控制参数的调整策略的改进,克服了MOGWO算法不稳定、易陷入局部最优的缺点,增强了算法的稳定性和寻优能力。
MOGWO算法在原有的GWO中集成了一个固定大小的外部存档,保存或检索当前获得的非支配的Pareto最优解[13],然后利用该存档来定义狼群社会层次结构,模拟多目标空间中灰狼的狩猎行为。在算法迭代的过程中,将新得到的非优势解与存档内的数据进行比较和更新。在外部存档并对狼群位置进行更新的过程中存在3种可能的更新策略:1)如果新的非优势解被至少一个存档内的数据主导,该解决方案不允许存入存档;2)如果新的非优势解主导存档中的一个或多个方案,将该非优势解替换原存档中的数据;3)如果新的非优势解和存档中的数据互不主导,将新的非优势解存入存档中。如果存档文件已满,则重新安排目标空间,插入新的解,以确保Pareto最优解的多样性。
在多目标狼群算法中,由于Pareto解的最优性很难选择出像原GWO算法中的狼领导狼群向有希望的区域空间进行搜索,但是存档中所储存的数据为当前的最优解,没有优劣之分,因此,该算法采用轮流选择的方法对存档中的所有数据进行选择,选出3个头狼引领狼群,称之为头狼选择策略。每一个数据被选择的概率如下

然而在实际运行中,因为个体狼会盲目的跟随头狼逼近目标,所以存在着探索能力不足,容易陷入局部最优而导致效果不稳定的问题。针对这些缺陷,AS-MOGWO算法借鉴了ABC[17-19]中观察蜂的搜索策略,使狼群中的每只狼在位置更新后,都会观察附近的状况并评估自己所在的位置,进行移动和更新,其遵循的公式如下
2.3 DE-AS-MOGWO算法原理
DE-AS-MOGWO算法的核心思想是在DE-GWO算法的基础上加入了MOGWO算法的外部存档,嵌入多目标算法的搜索机制,采用Tsallis熵对算法效率进行评估,同时为了弥补多目标灰狼算法探索能力不足,容易陷入局部最优而导致效果不稳定的问题,该算法又引入了蜂群算法中观察蜂的观察策略,从而得到了一种高效的全局优化多目标随机搜索方法。
DE-AS-MOGWO算法原理如下:首先,建立外部存档,更新狼群位置,将优秀个体存档;其次,对存档内种群差分进化,保留优秀个体,实现多目标优秀种群全局优化随机搜索;再次,采用Tsallis熵求个体适应度函数,轮盘赌[26]方式选出3只头狼;然后,采用人工蜂群算法中观察蜂的观察策略,避免局部最优,提升狼群探索能力;最后,使用变异和交叉操作更新种群位置,直至达到最大迭代次数,得出理想目标阈值,并依照该阈值对图像进行分割。算法流程示意如图3。
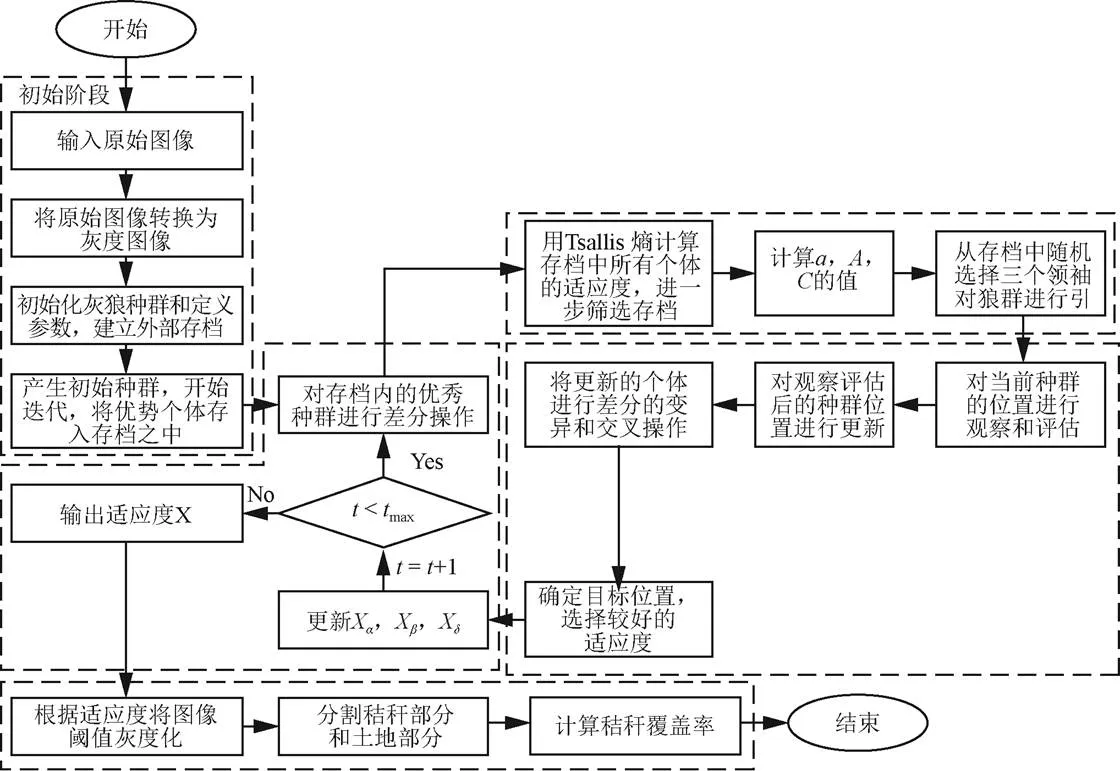
图3 DE-AS-MOGWO流程图
3 多阈值的多目标无人机图像分割的秸秆覆盖率检测
3.1 模拟试验
运用基于DE-AS-GWO算法对玉米秸秆图像进行二阈值分割,并与DE-GWO算法和DE-MOGWO算法所求得的秸秆覆盖率进行比较,验证算法的有效性和准确性。采用Photoshop CS6软件中手动精准检测面积的方法来手动标准分割图像,通过匹配率,误分率和准确率(见公式11-13)来评判算法对秸秆覆盖图像的分割效果[27]。手动精准测量方法步骤为:调整图像的色阶直方图,将土地部分调整到最暗,并且调整全部通道视图,选择秸秆部分和杂草部分,从直方图中的像素部分可以得出手动检测像素值。

此外,本文采用平均值和标准差[28]衡量算法匹配率,误分率和准确率的稳定性。
为控制变量得到精准数据,全程试验环境为:Mircrosoft Windows 10 Professional;CPU: Inter ®Core™ i5-9400 @ 2.90 GHZ-2.90 GHZ;RAM:16GB;显卡:GeForce GTX 1650;Visual Studio 2015 Professional软件开发环境。
本文算法参数设置如下:灰狼种群规模设为50,迭代次数为100,交叉概率为0.9,Archive种群最大个体数为100。为了避免随机性,每张图像运行100次,每10次为一组取平均值。为了加强秸秆覆盖率检测的准确性,将图像分割为秸秆图像、土壤图像和杂草图像。5种算法对图像的分割结果如图4。
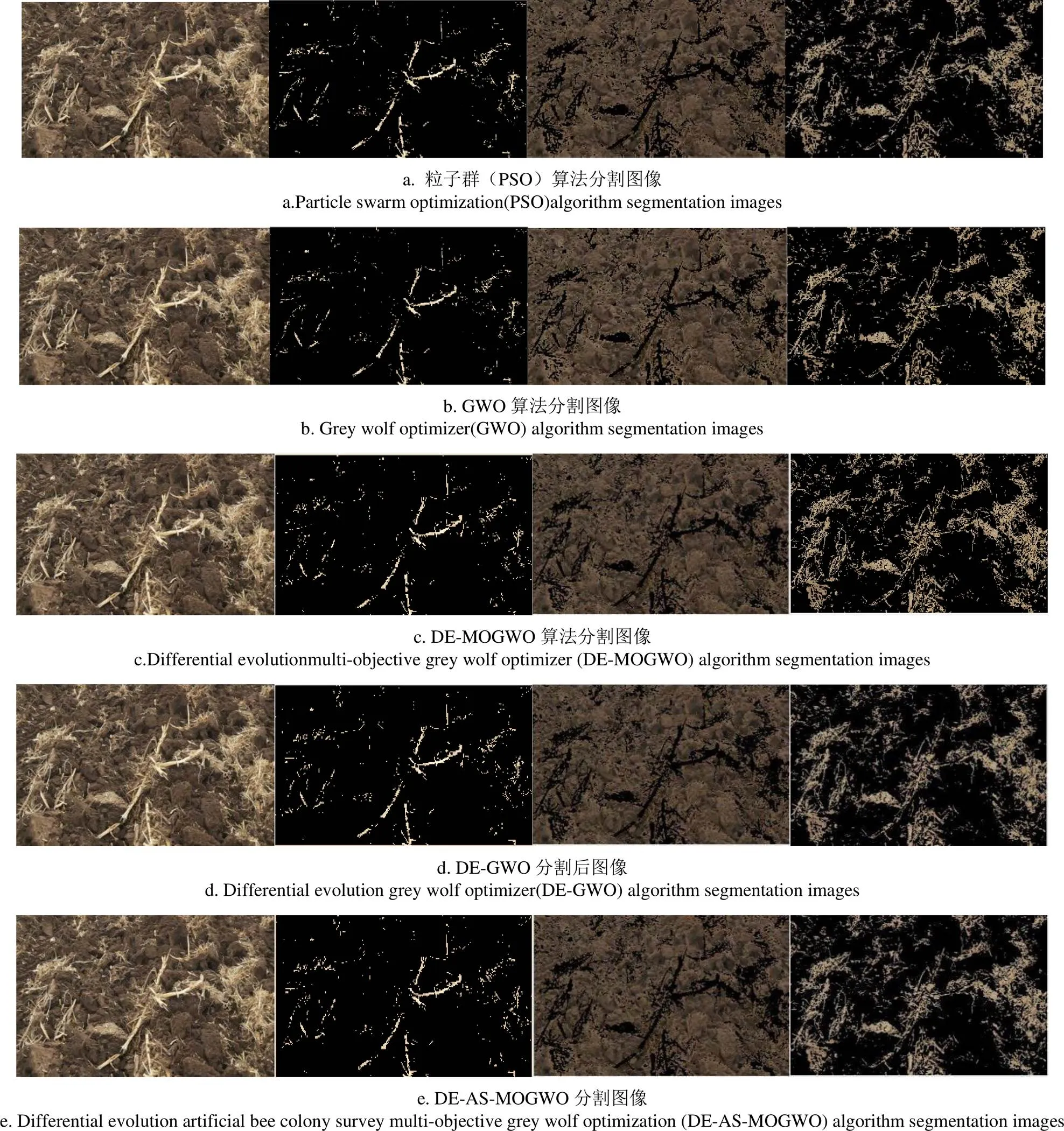
注:从左到右依次为:原始图像、秸秆图像、土壤图像、杂草图像。
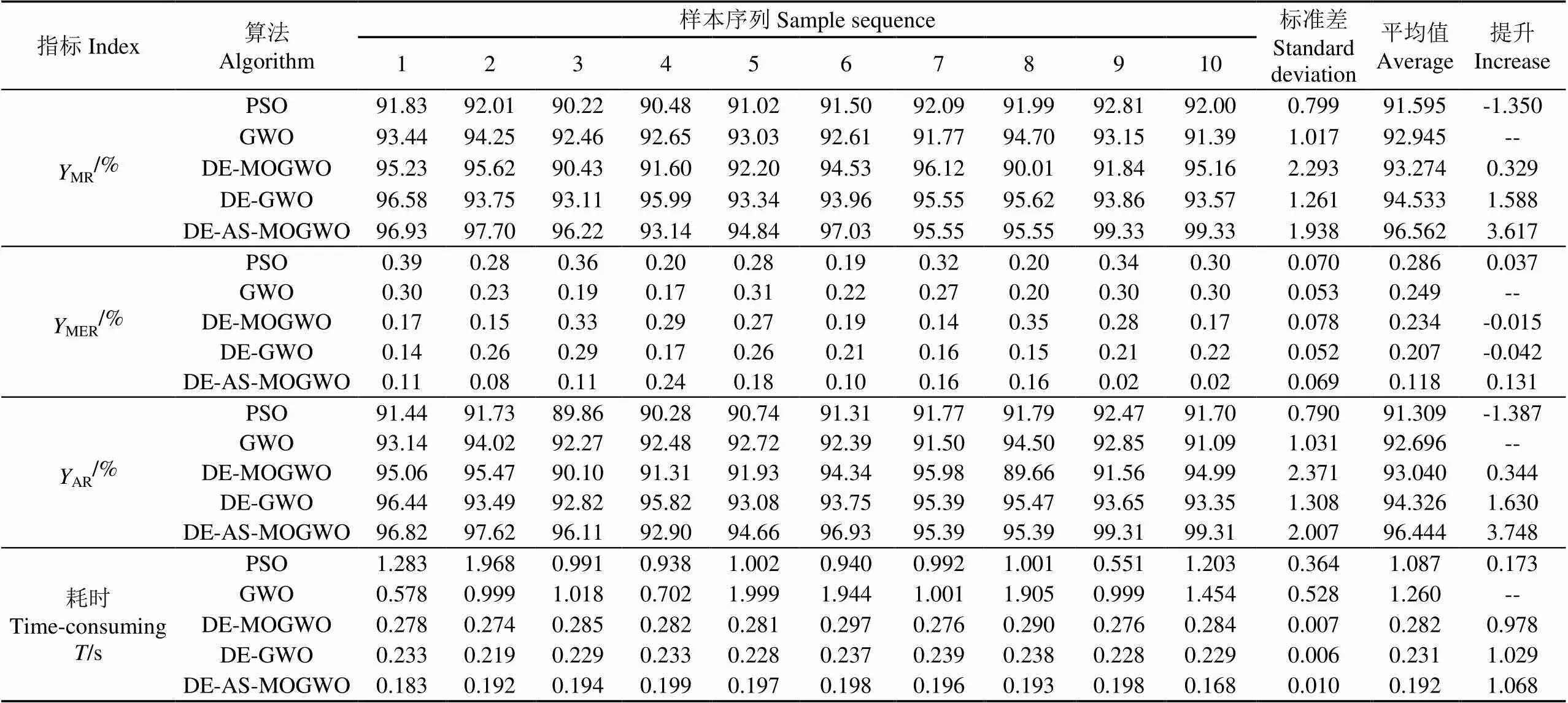
表1 算法判定结果对比
注:MR为匹配率,%;MER为误分率,%;AR为准确率,%,下同。
Note:MRis the matching rate,%;MERis the error rate,%;ARis the accuracy,%,the same below.
由图4可以看出,DE-AS-MOGWO算法用于秸秆覆盖率检测图像分割时较PSO、GWO、DE-GWO和DE-MOGWO算法具有更佳的秸秆、土地以及杂草的分割效果。由表1可知,DE-AS-MOGWO算法的平均匹配率高达96.562%,较PSO、GWO、DE-GWO和DE-MOGWO分别提高了4.967、3.617、2.029和3.288个百分点;DE-AS-MOGWO算法平均准确率达到96.444%,对比另外4种算法分别提高了5.135、3.748、2.188和3.404个百分点;DE-AS-MOGWO算法平均误分率为0.118%,对比另外4种算法分别降低了0.168、0.131、0.089和0.116个百分点;同时,衡量算法耗时,DE-AS-MOGWO算法比另外4种算法耗时分别降低了82%、84%、17%和32%。综上所述,DE-AS-MOGWO算法通过DE算法解决传统灰狼优化算法易于陷入局部最优和处理速度较慢,扩展多目标提升了多阈值图像分割的准确度,ABC算法对所求问题的解进行优劣的比较,增强算法稳定性和寻优能力。DE-AS-MOGWO算法应用于秸秆覆盖率检测图像分割时较PSO、GWO、DE-GWO和DE-MOGWO算法可靠性更高,分割效果更佳,耗时更短。
3.2 秸秆特征图像分割
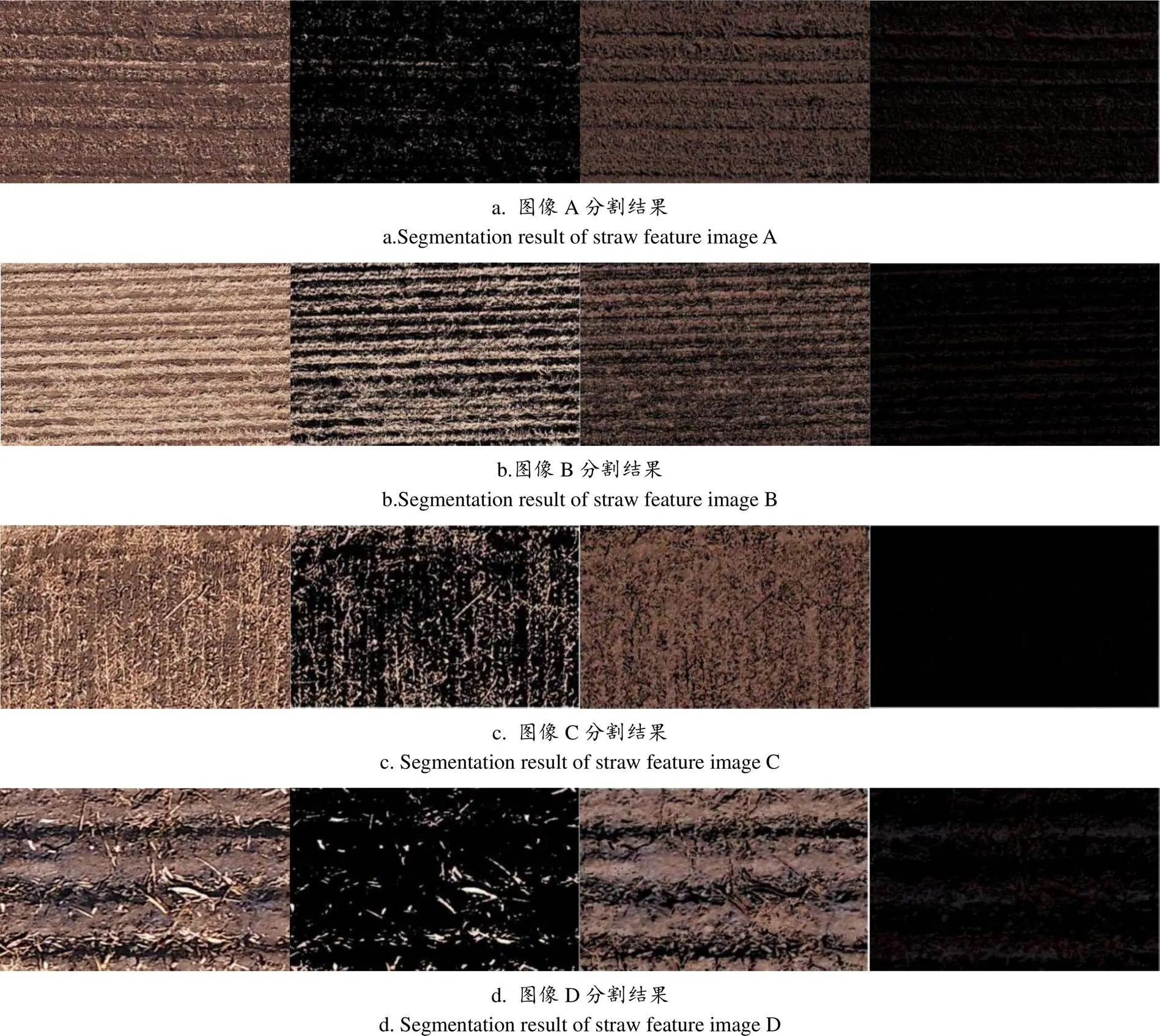
为了验证本文算法的普遍适用性,本文运用基于DE-AS-MOGWO图像分割的算法对4幅具有不同特征的代表性秸秆图像进行二阈值分割。图像A为旋耕后耕地图像,秸秆和杂草含量较少;图像B为秸秆粉碎还田后图像,含有大量秸秆和少量杂草;图像C为秸秆收割后茎茬残余图像,仅含有茎茬,不含有杂草;图像D为秸秆焚烧后耕地图像,仅含有少量残余秸秆。每张图像运行100次,每10次为一组取平均值求得秸秆的覆盖率,并利用与3.1中相同的方法求得匹配率、误分率、准确率以及标准差。其处理结果如图5,试验结果见表2。
由表2可以得知,对于4种不同特征的秸秆覆盖图像,本文提出的DE-AS-MOGWO算法均可以得到较高的匹配率和准确率,较低的误分率,且耗时较短,因此说明该算法在秸秆检测分割处理时具有普遍适用性。
3.3 秸秆覆盖率检测应用试验
本文采用DJI大疆悟2代inspire2无人机搭载X5S云台相机,采集时间为2017年10月21日、2018年11月5日,采集地点为中国吉林省榆树市大岗乡,采集范围地理坐标分别为(126.261 675°E,45.097 652°N)、(126.287 043°E,45.101 012°N)、(126.262 969°E,45.074 335°N)、(126.300 194°E,45.075 098°N),采集条件为自然光照,垂直地面距离:50 m。
为了验证DE-AS-MOGWO算法不同阈值下对秸秆图像分割的效果,本文选取了3组采集的图像,分别用DE-MOGWO算法,DE-GWO算法和本文提出的DE-AS-MOGWO算法,根据图像的复杂程度使用了不同的阈值进行分割处理。根据灰度分级[29-30],已耕作部分为0~56,土壤部分为56~109,其他部分为109~165,秸秆部分为165~214,杂草部分为214~255。利用本文的DE-AS-MOGWO算法,不同阈值分割结果如图6,提取出图像中的不同元素,并记录时间,通过提取的秸秆的像素点和整个图像的像素点求出秸秆覆盖的面积。
图像面积与无人机fov视角有关[31],本文图像与实际面积转换公式为
注:从左到右依次为:原始图像、秸秆图像、土壤图像、杂草图像。
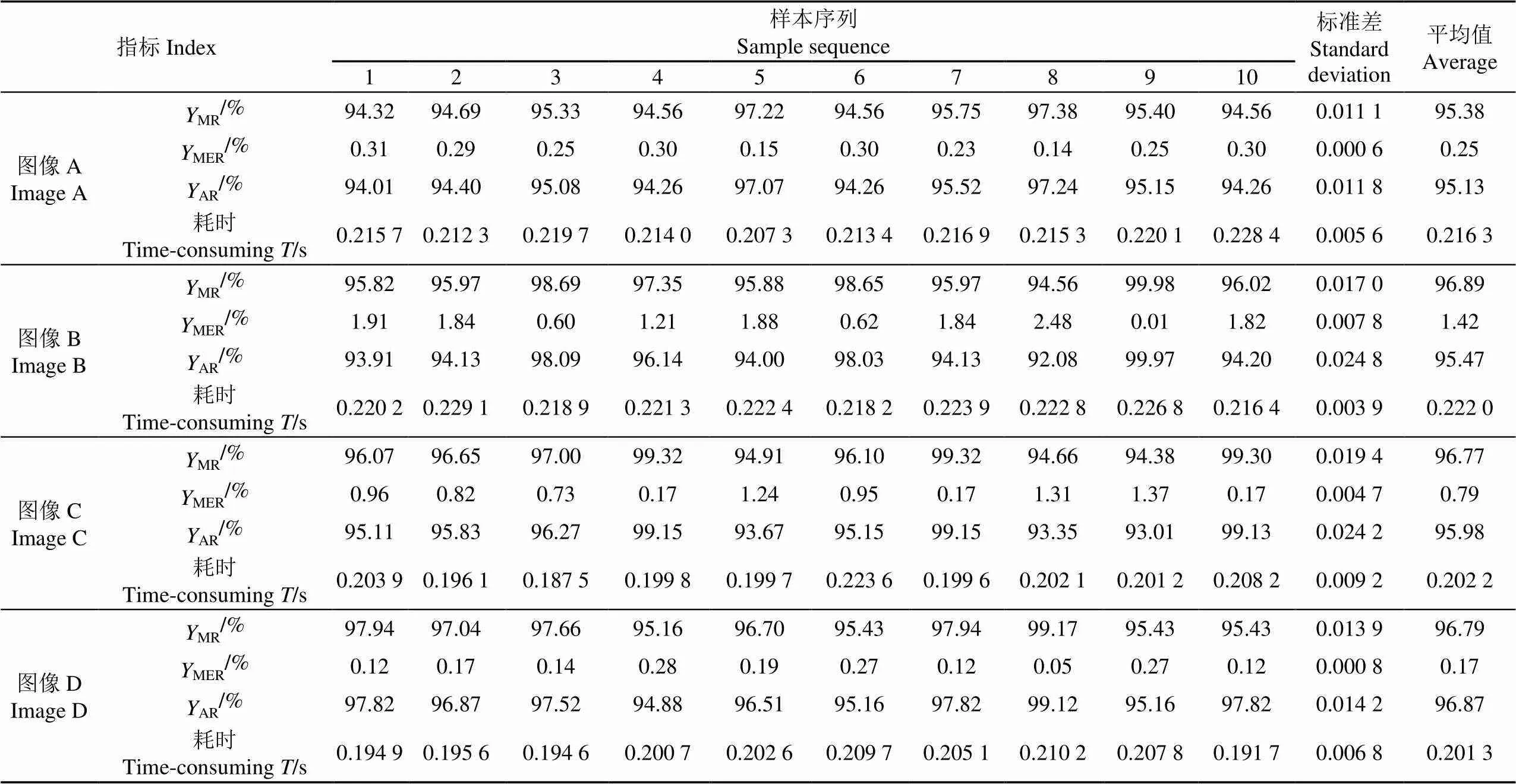
表2 秸秆特征图像分割结果
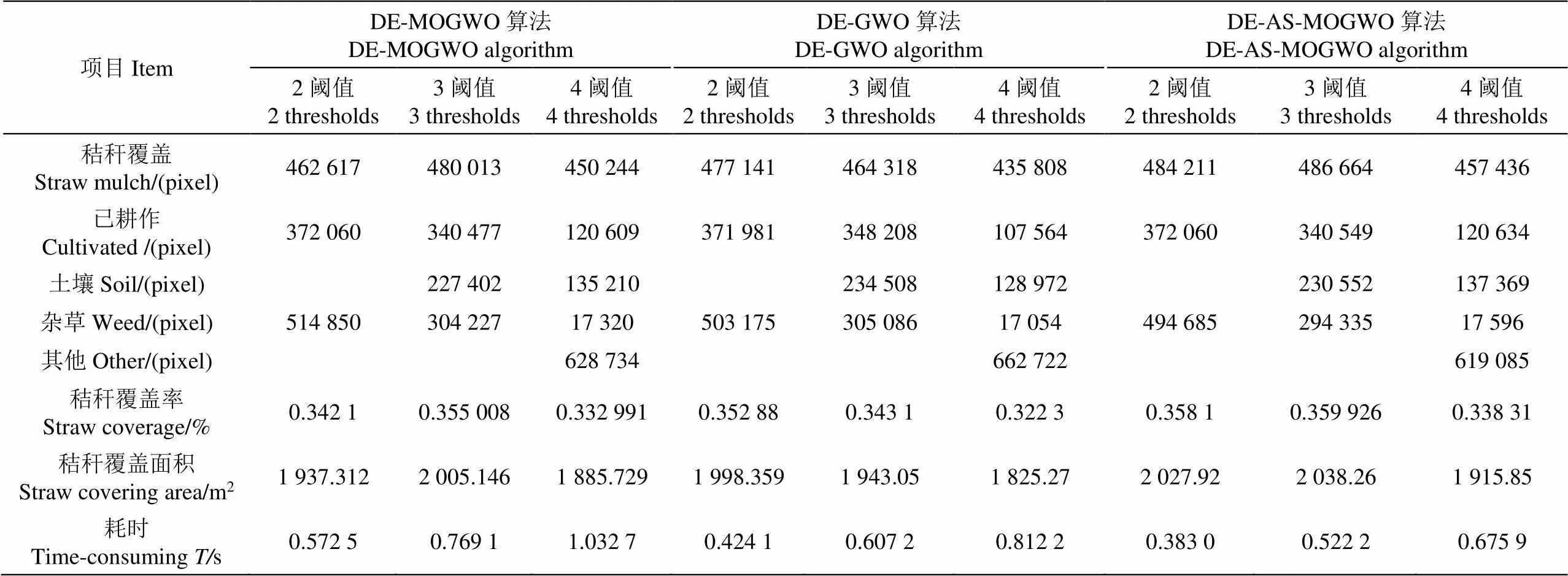
表3 不同阈值分割数据
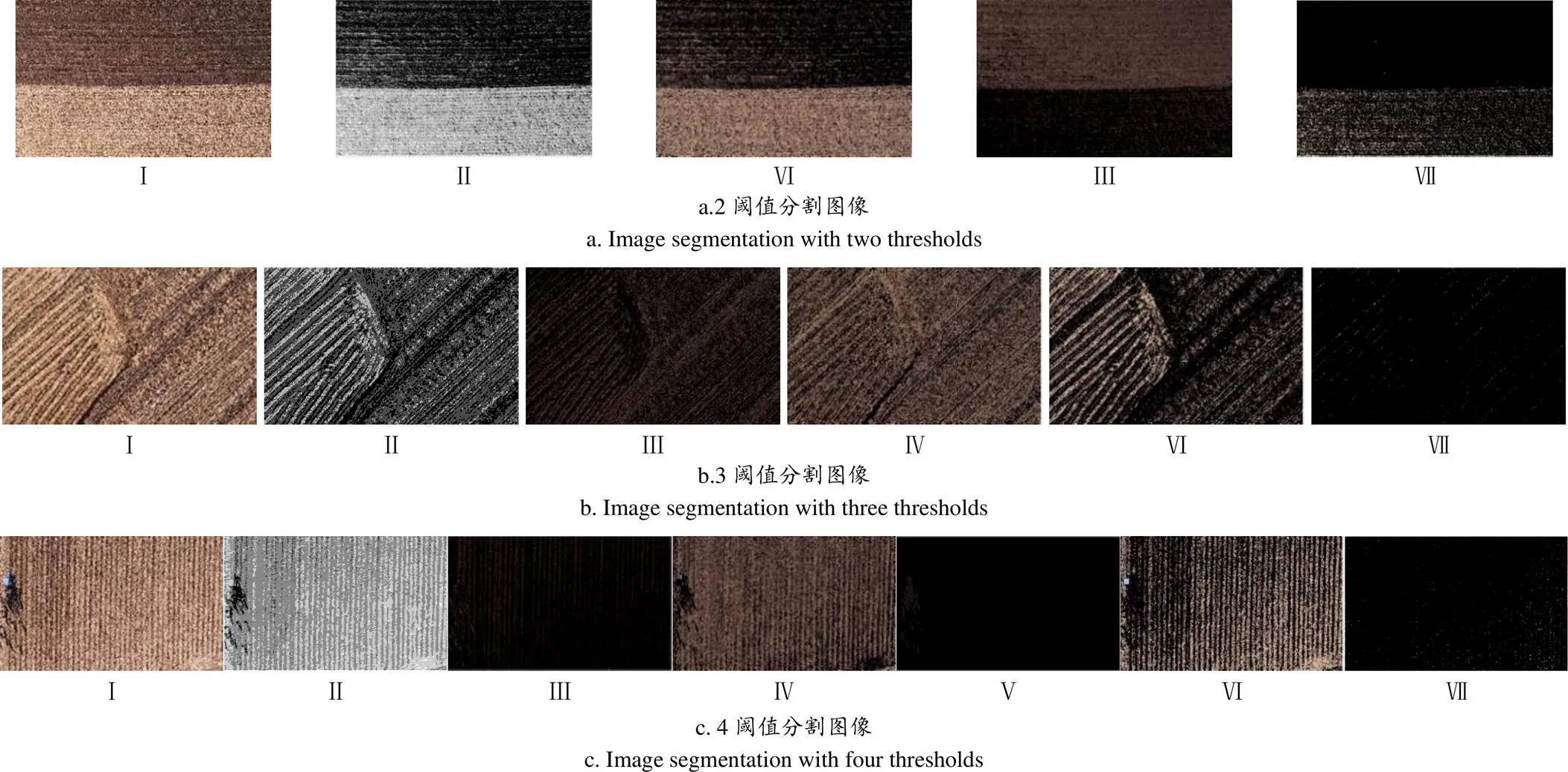
注:Ⅰ~Ⅶ依次为:原始图像、分割图像、已耕作图像、土壤图像、其他(农具)图像、秸秆覆盖图像、杂草图像。
Note: From Ⅰ to Ⅶ, they are original image,segmentation image, cultivated image,soil image, other (farm tools) image,straw mulching image,weed image.
图6 不同阈值的分割图像
Fig.6 Segmentation images with different thresholds
为避免偶然性,对每个图片每个阈值的每种算法运行30次求平均值得到表3,通过图6以及表3可知,3种算法对秸秆覆盖图像进行不同阈值的分割处理,DE-AS-MOGWO算法耗时明显少于其他两种算法,且该算法可以根据复杂程度对不同图像进行准确的多阈值分割处理。
3.4 算法计算与人工测量对比试验
将表3中的数据与在Photoshop软件中手动精准检测所得到的数据进行比较可以得知,DE-AS-MOGWO算法分割的结果与人工测得的秸秆覆盖面积最为接近,其中在二阈值分割图像中,手动精准检测得到实际秸秆覆盖面积为2 092 m2,DE-AS-MOGWO算法求得面积为2 027.93 m2,本文算法准确度高达96.94 %,时间缩短为手动测量时间的1/2 603。在3阈值图像中,2种方法分别求得面积为2 089 m2和2 038.26 m2,本文算法时间缩短为手动测量的1/2 305,准确度高达97.54%;在4阈值图像中,两种方法分别求得面积为2 072 m2和1 915.85 m2,本文算法准确度高达92.43%,时间缩短为手动的1/2 628。其误差主要来源于农具等外界因素影响。应用本文所提出的DE-AS-MOGWO算法来检测秸秆的覆盖面积相对手动精准检测的测量结果,不同的阈值及不同的图像的精确度均可高达92.4%以上,平均耗时可缩短至1/2 511。考虑到图像的大小可能会对算法的检测结果产生影响。
为了能够更加直观的体现出本文算法对于不同图像以及不同阈值的分割效果,本文从两个方面:1)利用3种算法对10幅采集图像进行不同阈值的分割,并将最终的计算数据与手动检测所得的数据进行对比;2)选取了10幅大小不同的采集图像进行分割,并将计算数据与手准检测进行对比。结果如图7。
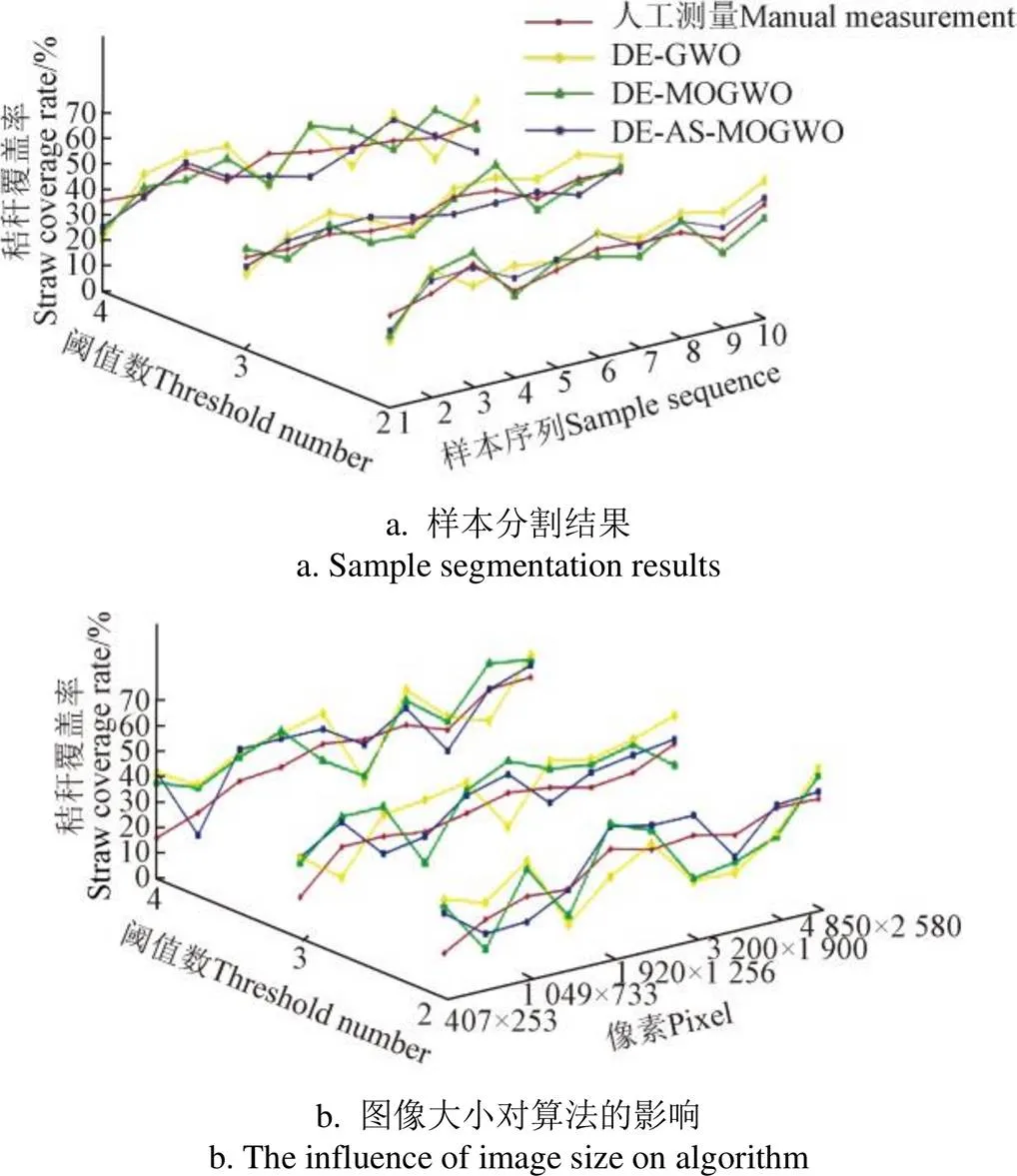
图7 人工测量与算法计算对比图
由图7可知,本文算法对不同像素大小的图片的处理结果与人工测量的数据均可达到较高的匹配度,然而当图像越大时,该算法的准确度越高,二阈值的分割效果最佳。
4 秸秆覆盖面积检测应用
为方便使用及推广,在本文算法的基础上开发了一套秸秆覆盖面积检测软件系统,系统由输入图像,参数设置以及结果输出3个部分组成。其中,系统的输入采用了路径选择的方式对已经储存在计算机内部的图像进行选择,图像输入系统后,即可设置所需的算法以及参数,该系统可以选择GWO、DE-GWO、DE-MOGWO和本文所提出的DE-AS-MOGWO算法,用于不同算法处理结果的对比,所需设置的参数根据不同的算法包括种群规模、迭代次数、交叉概率,Archive种群数目及相机fov视角、拍摄的高度等。输出部分则包括原始的输入图像,算法处理后秸秆覆盖部分的图像,已耕作部分的图像,土壤部分的图像和其他部分的图像,以及各部分图像的像素数量;并根据这些数值计算出图像采集区域的秸秆覆盖面积和秸秆覆盖率。该软件系统的部分界面如图8、9。
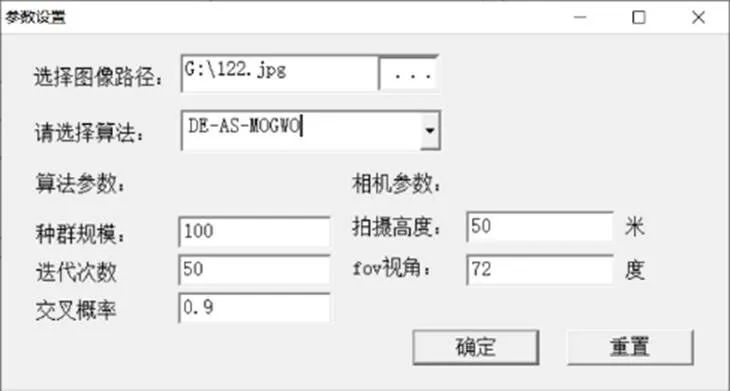
图8 秸秆覆盖面积检测软件参数界面

图9 秸秆覆盖面积检测软件主界面
5 结论
1)提出一种图像自动分割的优化算法多阈值差分灰狼优化算法DE-AS-MOGWO,运用该算法可以实现对图像的多阈值分割处理,并对秸秆覆盖率进行精确的检测。
2)DE-AS-MOGWO算法较PSO、GWO、DE-GWO、DE-MOGWO算法分别耗时缩短82%、84%、17%、32%,具有更高的匹配率和准确率、更小的误分率,大大缩短了时间消耗。
3)将本文算法实际应用于秸秆覆盖率的检测,结果表明,使用DE-AS-MOGWO算法对秸秆覆盖率检测的误差被控制在了8%以内,为人工测量平均耗时的1/2 511,且算法对较大尺度图像分割准确率较高,适合秸秆覆盖率大面积检测需求,极大地提高了检测效率,满足实际的检测需求。
4)依据本文算法开发了秸秆覆盖面积检测软件,大大地方便了人员对秸秆覆盖率的实地检测,亦为基于航拍图像处理提供了高效的分割算法支持。
[1] Lucas-Borja M E, Plaza-Álvarez P A, Romero J G, et al. Short-term effects of prescribed burning in Mediterranean pine plantations on surface runoff, soil erosion and water quality of runoff[J]. Science of The Total Environment in press, 2019, (674): 615-622.
[2] 田慎重,张玉凤,边文范,等. 深松和秸秆还田对旋耕农田土壤有机碳活性组分的影响[J]. 农业工程学报,2020,36(2):185-192. Tian Shenzhong, Zhang Yufeng, BianWenfan, et al. Effects of subsoiling and straw return on soil labile organic carbon fractions in continuous rotary tillage cropland[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(2): 185-192. (in Chinese with English abstract)
[3] 龚振平,杜婷婷,闫超,等. 玉米秸秆还田及施磷量对黑土磷吸附与解吸特性的影响[J]. 农业工程学报,2019,35(22):161-169. Gong Zhenping, Du Tingting, Yan Chao, et al. Effects of corn straw returning and phosphorus application rate on phosphorus adsorption and desorption characteristics of black soil[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(22): 161-169. (in Chinese with English abstract)
[4] Yang Q, Zheng J, Zhu H. Influence of spatiotemporal change of temperature and rainfall on major grain yields in southern Jiangsu Province, China[J]. Global Ecology and Conservation, 2020, 21.
[5] 刘媛媛,王跃勇,于海业,等. 基于多阈值图像分割算法的秸秆覆盖率检测[J]. 农业机械学报,2018,49(12):34-42,62. Liu Yuanyuan, Wang Yueyong, Yu Haiye, et al. Detection of straw coverage rate based on multi-threshold image segmentation algorithm[J]. Transactions of The Chinese SocietyforAgricultural Machinery, 2018, 49(12): 34-42,62. (in Chinese with English abstract)
[6] Mirjalili S, Mirjalili S M, Lewis A. Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69(3): 46-61.
[7] Storn R, Price K. Differential evolution – A simple and efficient heuristic for global optimization over continuous spaces[J]. Journal of Global Optimization, 1997, 11(4): 341-359.
[8] 刘畅,何俊杰,肖可,等. 一种基于差分进化神经网络的模糊控制方法[J]. 福建电脑,2018,34(3):3-6,167.
[9] 姜海燕,赵空暖,汤亮,等. 基于自适应差分进化算法的水稻物候期预测模型参数自动校正[J]. 农业工程学报,2018,34(21):176-184. Jiang Haiyan, Zhao Kongnuan, Tang Liang, et al. Automatic calibration of parameters for crop phenological predicting model based on adaptive differential evolution algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(21): 176-184. (in Chinese with English abstract)
[10] 厉玉康,王玉琳,黄海鸿. 改进差分进化算法在大型工件平面度评定中的应用[J]. 光学精密工程,2019,27(12):2659-2667. Li Yukang, Wang Yulin, Huang Haihong. Application of improved differential evolution algorithm in flatness evaluation of large work-pieces[J]. Optics and Precision Engineering, 2019, 27(12): 2659-2667. (in Chinese with English abstract)
[11] 巢渊,戴敏,陈恺,等. 基于广义反向粒子群与引力搜索混合算法的多阈值图像分割[J]. 光学精密工程,2015,23(3):879-886. Chao Yuan, Dai Min, Chen Kai, et al. Image segmentation of multilevel threshold using hybrid PSOGSA with generalized opposition-based learning[J]. Optics and Precision Engineering, 2015, 23(3): 879-886. (in Chinese with English abstract)
[12] Mirjalili S, Saremi S, Mirjalili S M, et al. Multi-objective grey wolf optimizer: A novel algorithm for multi-criterion optimization[J]. Expert Systems with Applications, 2016, 47: 106-119.
[13] Engau A, Sigler D. Pareto solutions in multicriteria optimization under uncertainty[J]. European Journal of Operational Research, 2020, 281(2): 357-368.
[14] 宋怀波,牛满堂,姬存慧,等. 基于视频分析的多目标奶牛反刍行为监测[J]. 农业工程学报,2018,34(18):211-218. Song Huaibo, Niu Mantang, Ji Cunhui, et al. Monitoring of multi-target cow ruminant behavior based on video analysis technology[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 211-218. (in Chinese with English abstract)
[15] 崔明朗,杜海文,魏政磊,等. 多目标灰狼优化算法的改进策略研究[J]. 计算机工程与应用,2018,54(5):156-164. Cui Minglang, Du Haiwen, Wei Zhenglei, et al. Research on improved strategy for multi-objective gray wolf optimization[J]. Computer Engineering and Application, 2018, 54(5): 156-164. (in Chinese with English abstract)
[16] 杨晨,黄雪冰,刘文俊,等. 山麻鸭卵泡发育的形态学及激素分泌调控基因的表达研究[J]. 仲恺农业工程学院学报,2019,32(2):17-22. Yang Chen, Huang Xuebing, Liu Wenjun, et al. Morphology of the follicular development and the expression of hormone secretion regulating genes in Shan Partridge duck[J]. Journal of Zhongkai University of Agricultural Engineering, 2019, 32(2): 17-22. (in Chinese with English abstract)
[17] Akay B, Karaboga D. Artificial bee colony algorithm for large-scale problems and engineering design optimization[J]. Journal of Intelligent Manufacturing, 2012, 23(4): 1001-1014.
[18] 董娜,刘欣宇,吴爱国. 基于人工蜂群的新型圆形交通标志识别算法[J]. 天津大学学报(自然科学与工程技术版),2019,52(6):585-593. Dong Na, Liu Xinyu, Wu Aiguo. Detection method for circular traffic signs based on artificial bee colony[J]. Journal of Tianjin University (Science and Technology), 2019, 52(6): 585-593. (in Chinese with English abstract)
[19] Lo ChiChun, Tsai ShangHo, Lin BorShyh. Economic dispatch of chiller plant by improved ripple bee swarm optimization algorithm for saving energy[J]. Applied Thermal Engineering, 2016, 100(5): 1140-1148.
[20] 孙俊,丛孙丽,毛罕平,等. 基于高光谱的油麦菜叶片水分CARS-ABC-SVR预测模型[J]. 农业工程学报,2017,33(5):178-184. Sun Jun, Cong Sunli, Mao Hanping, et al. CARS-ABC-SVR model for predicting leaf moisture of leaf-used lettuce based on hyperspectral[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(5): 178-184. (in Chinese with English abstract)
[21] 王春雷,卢彩云,陈婉芝,等. 基于遗传算法和阈值滤噪的玉米根茬行图像分割[J]. 农业工程学报,2019,35(16):198-205. Wang Chunlei, Lu Caiyun, Chen Wanzhi, et al. Image segmentation of maize stubble row based on genetic algorithm and threshold filtering noise[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(16): 198-205. (in Chinese with English abstract)
[22] 王跃勇,于海业,刘媛媛. 基于形态学图像检测的机械手移栽穴苗识别技术[J]. 光学精密工程,2016,24(3):651-658. Wang Yueyong, Yu Haiye, Liu Yuanyuan. Recognition of seedlings in mechanical transplanting processing by morphological image detection [J]. Optics and Precision Engineering, 2016, 24(3): 651-658. (in Chinese with English abstract)
[23] 孙颖,张志佳. 基于频域滤波的自适应条带噪声去除算法[J]. 仪表技术与传感器,2006,43(2):57-59. Sun Ying, Zhang Zhijia. Adaptively de-striping algorithm based on frequency filtering[J]. Instrument Technique and Sensor, 2006, 43(2): 57-59. (in Chinese with English abstract)
[24] 张新明,张贝,涂强. 广义概率Tsallis熵的快速多阈值图像分割[J]. 数据采集与处理,2016,31(3):502-511. Zhang Xinming, Zhang Bei, Tu Qiang. Fast multilevel thresholding for image segmentation based on Generalized Probability Tsallis entropy[J]. Journal of Data Acquisition and Processing, 2016, 31(3): 502-511. (in Chinese with English abstract)
[25] Sholehkerdar A, Tavakoli J, Liu Z. Theoretical analysis of Tsallis entropy-based quality measure for weighted averaging image fusion[J]. Information Fusion, 2020, 58: 69-81.
[26] 余敏建,游航航,韩其松,等. 基于改进烟花算法的空战指挥引导对策生成[J]. 系统工程与电子技术,2019,41(12):2780-2788. Yu Minjian, You Hanghang, Han Qisong, et al. Generation of air combat command and guidance countermeasures based on improved fireworks algorithm[J]. Systems Engineering and Electronic, 2019, 41(12): 2780-2788. (in Chinese with English abstract)
[27] Camargo A, Smith J S. An image-processing based algorithm to automatically identify plant disease visual symptoms[J]. Biosystems Engineering, 2009, 102(1): 9-21.
[28] 张解语,仇原鹰,宁博,等. 筒形件姿态的非接触无靶标自动综合测量及求解[J]. 光学精密工程,2018,26(12):2963-2970. Zhang Jieyu, Qiu Yuanying, Ning Bo, et al. Automatic comprehensive noncontact measurement and solution method for cylindrical workpieces without targets[J]. Optics and Precision Engineering, 2018, 26(12): 2963-2970. (in Chinese with English abstract)
[29] Dey A, Dey S, Bhattacharyya S, et al. Novel quantum inspired approaches for automatic clustering of gray level images usingparticle swarm optimization, spider monkey optimization and ageist spider monkey optimization algorithms[J]. Applied Soft Computing, 2020, 88: 1-29.
[30] Kamoona A M, Patra J C. A novel enhanced cuckoo search algorithm for contrast enhancement of gray scale images[J]. Applied Soft Computing Journal, 2019, 85: 1-20.
[31] 吕振义,何诚,舒立福,等. 无人机视角下的林木爆燃火特性研究[J]. 光谱学与光谱分析,2019,39(12):3946-3952. Lv Zhenyi, He Cheng, Shu Lifu, et al. Deflagration characteristics of forest trees from the perspective of UAV[J]. Spectroscopy and Spectral Analysis, 2019, 39(12): 3946-3952. (in Chinese with English abstract)
Detection of straw coverage based on multi-threshold and multi-target UAV image segmentation optimization algorithm
Liu Yuanyuan1, Sun Jiahui1, Zhang Shujie1, Yu Haiye2, Wang Yueyong3※
(1.,130118,; 2.,,,130025,; 3.,,130118,)
Straw mulching has been an efficient solution to reduce soil loss in environmental protection and sustainable development in modern agriculture. Therefore, a rapid detection of straw coverage can contribute to the efficiency and accuracy in the process of straw mulching. In this study, a novel algorithm was proposed to optimize large-scale image segmentation for the aerial image of straw coverage during straw mulching. An artificial bee colony survey multi-objective grey wolf optimization algorithm (AS-MOGWO) was used to upgrade via introducing the design concept of multi-objective integration. Specifically, an external archive of multi-objective grey wolf optimization algorithm (MOGWO) was added into the differential evolution (DE) GWO, and the search strategy of observed bees in artificial colony algorithm. The DE algorithm can be used to solve the problem that the traditional gray wolf optimization algorithm (GWO) is easy to fall into the local optimal and the slow processing speed. Extending to multi-objective can also improve the accuracy of multi-threshold image segmentation. The Observation phase of artificial bee colony algorithm (ABC) can be used to compare the solution of problem, and further to enhance the stability and optimization ability of algorithm. The DE-GWO algorithm was extended from single target to multi-target DE-MOGWO, thereby to achieve multi-objective optimization. The accuracy of multi-threshold image segmentation was greatly improved, while, the algorithm was enhanced to extract and classify different ground objects in the collected images. The observation phase of ABC algorithm was added in the detection of straw coverage, further to improve the quality and processing speed of automatic image segmentation. The stability and optimization ability of algorithm can be enhanced after the integration of various methods. The upgraded algorithm inherited the automatic segmentation of DE-GWO, while gained the efficient convergence of AS-MOGWO, indicating an improved stability and processing speed for image segmentation. An optimal threshold was set using the gray-scale histogram of straw image, then to segment the images, and finally to calculate the number of pixels in each part and the coverage of straw. The experimental results showed that the matching error was less than 8% between the DE-AS-MOGWO optimization algorithm and the manual measurement method. Compared with the PSO, GWO, DE-GWO, and DE-MOGWO algorithms, the average matching rate of DE-AS-MOGWO improved 4.967, 3.617, 2.188 and 3.404 percentage point, respectively, whereas, the average error rate reduced 0.168, 0.131, 0.089 and 0.116 percentage point, respectively. Furthermore, the algorithm time reduced 82%, 84%, 17% and 32%, respectively. A software system was also developed for the area detection of straw coverage based on the proposed algorithm, where the straw covering area and straw coverage rate can be calculated from the acquisition area of aerial images. The GWO, DE-GWO, DE-MOGWO and DE-AS-MOGWO algorithms can also be selected for the comparison of different results. The DE-AS-MOGWO algorithm can produce a better segmentation, while processing with large-scale UAV images in a short time, indicating an excellent applicability under various conditions in the images of straw coverage. The finding can provide a promising potential way to improve the segmentation accuracy for the detection of straw coverage in modern agriculture.
straw; algorithm;grey wolf optimizer; multi-threshold; multi-objective; observe the strategy; straw coverage
刘媛媛,孙嘉慧,张书杰,等. 用多阈值多目标无人机图像分割优化算法检测秸秆覆盖率[J]. 农业工程学报,2020,36(20):134-143.doi:10.11975/j.issn.1002-6819.2020.20.016 http://www.tcsae.org
Liu Yuanyuan, Sun Jiahui, Zhang Shujie, et al. Detection of straw coverage based on multi-threshold and multi-target UAV image segmentation optimization algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2020, 36(20): 134-143.(in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.20.016 http://www.tcsae.org
2020-06-17
2020-10-02
国家自然科学基金(42001256);吉林省科技厅重点科技项目(20180201014NY);吉林省发改委创新资金项目(2019C054)
刘媛媛,博士,讲师,主要从事农业信息化图像和视频信号处理方面研究。Email:liuyuanyuan@jlau.edu.cn
王跃勇,博士,副教授,主要从事智能系统、生物环境与能源工程研究。Email:yueyongw@jlau.edu.cn
10.11975/j.issn.1002-6819.2020.20.016
S24;TP751
A
1002-6819(2020)-20-0134-10