基于语音交互功能的智能分类垃圾箱
2020-12-25伍玲玲邹行宇张宇涵侍中楼
刘 鹏 伍玲玲 邹行宇 张宇涵 侍中楼 徐 伟
(1.江汉大学智能制造学院,湖北 武汉 430056;2.江汉大学工程训练中心,湖北 武汉 430056)
0 引言
智能垃圾箱是一种以物联网技术为基础,利用自动控制技术,采用微电脑控制芯片、新型传感探测装置和机械传动装置等设备,对传统垃圾箱进行改造发展而来的新型智能家居生活用品[1]。为了适应垃圾分类工作的需求,各种智能垃圾箱进入市场。与传统垃圾箱相比,智能垃圾箱解决了垃圾分类的需求,为生产生活带来了许多便利。但自身也存在着诸多问题,例如,操作不方便、垃圾分类不准确、垃圾打包不卫生、传感器灵敏度不高以及人机交互功能不强等弊端。该文针对这些问题设计了一款基于语音交互功能的智能分类垃圾桶,以ESP8266物联网模块为核心,实现了物联网组网功能,垃圾箱配有多级齿轮箱、热熔切断装置和简易气压回路装置,可以自动完成垃圾分类、打包套袋。此外该设计还配有语音识别播报系统,不仅实现了人机交互、垃圾智能分类,而且具有很强的市场应用和推广前景。
1 垃圾箱系统设计
该项目基于语音识别交互功能,控制部分硬件系统以Arduino Mega2560为设备终端CPU,LD3320和语音播报模块构成语音识别交互系统,实现智能分类,电磁换向阀和气泵构成简易气压回路,实现套袋功能和打包功能。通过ESP8266、显示屏和OneNET云平台实现人工智能。系统可以通过2种方式实现控制。1)由OneNET云平台连接设备终端节点和应用端,用户通过手机App或在PC端上发送命令,以此来控制相关模块。2)用户直接控制操作垃圾箱。
1.1 硬件设计
垃圾箱主体为铝型材框架结构,长80 cm,宽40 cm,高80 cm,适用于可回收垃圾和其他垃圾。如图1所示,该系统结构分为上、中、下3层,上层安装上箱盖、盖子、多级减速箱、显示屏、按键。中层安装剪切机构、垃圾袋收纳盒、气管。下层安装箱体、垃圾支撑盒、两位三通电磁换向阀、气泵、电池、单片机,并配有中控语音识别播报系统、显示屏控制系统、简易气压回路系统。其中多级减速箱采用不完全齿轮,实现盖子的打开与关闭。垃圾袋收纳盒集中放置已折叠垃圾袋,剪切机构采用环链式传动机构和加热丝实现垃圾袋切割打包,垃圾支撑盒通过定滑轮实现垃圾袋的翻转。图1为系统总架构图。
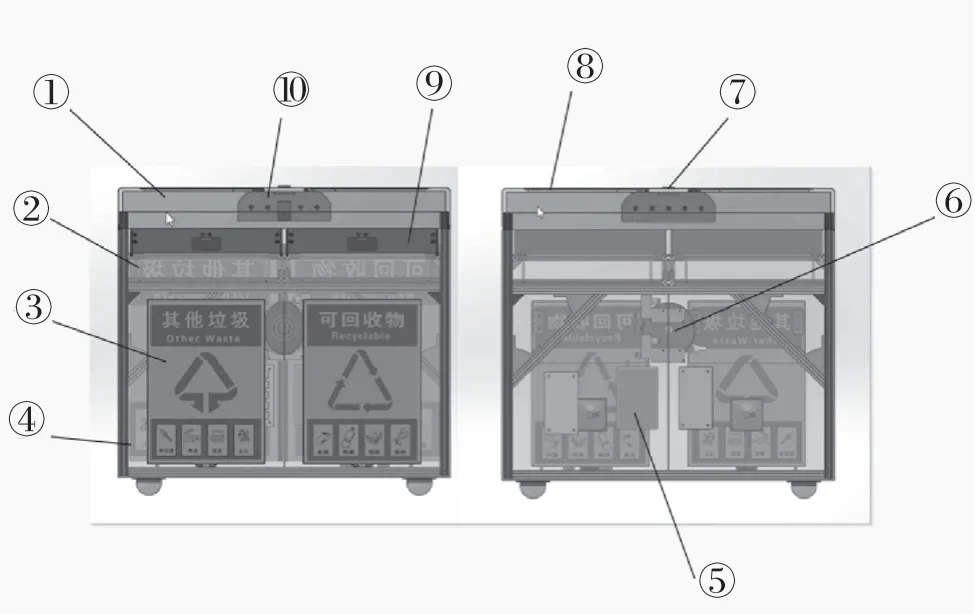
图 1系统总架构实物图
1.1.1 执行机构
垃圾箱具有自动打包套袋功能。自动套袋的执行机构采用二位三通换向阀切换回路产生气压差实现运动过程,其传动机构就是一整套气压回路装置,动力源是气泵。自动打包的执行机构是切断杆,其传动机构是环式的链传动和齿轮传动,动力源是电机。
1.1.2 自动套袋
自动套袋功能通过气压回路传动装置、垃圾袋收纳盒电动抽气泵结合二位三通换向阀和限位开关实现,利用垃圾本身的重力实现垃圾袋套袋功能,通过抽气机构利用负压的原理使垃圾袋自动套袋,然后通过接近开关检查垃圾袋位置状态,保证垃圾袋准确到达设计位置。
左边套袋:当左端入口LI(left_in,ri(right_in))与左端出口LO(left_out,ro(right_out))相连通时,启动抽气机,抽走左垃圾箱下方内的空气并从上方吹入垃圾袋,实现垃圾桶的自动套袋。
右边套袋:CPU给右边回路以模拟输出,模拟开关打开,指示灯亮起,感应线圈Y得电,二位三通电磁换向阀进入工作状态,T转换到P形成右边回路,抽气机工作,抽出右垃圾桶下方的空气并从上方吹入垃圾袋,实现垃圾桶的自动套袋。如图2抽气系统运作示意图和表1气压传动真值表所示。

表1 气压传动真值表
1.1.3 自动打包
剪切熔断装置的功能是将打包好的垃圾袋封口,等待自动打包动作结束后,垃圾箱侧向开口,方便用户提取垃圾。
当垃圾装满后,通过电机驱动环链带带动第一切断杆(如图3(b)所示)和第二切断杆(如图3(c)所示)相对运动,最后被第一切断杆中间镶嵌的熔断器熔断,形成新的封口端,装满垃圾的部分同时被封口,可以直接取出,具备很好的实用性[2]。
垃圾袋送出功能,采用活页翻转链接实现。下活页固定在大垃圾箱底部,上活页固定在垃圾支撑盒底部。翻转垃圾箱处于闭合工作状态时,其底面与水平面平行。当需要取出垃圾袋时,内桶电机开始运行,收绳通过定滑轮拉动垃圾箱定向翻转。以翻转垃圾箱外把手一面为0°基准面,逆时针为正方向,绕活页旋转轴旋转49°到达极限位置即限位开关处。
1.2 电子控制部分
该智能垃圾箱所有的硬件设备都在Arduino Mega2560开发板上进行集成和控制,通过ESP8266模块实现了垃圾箱与计算机之间的通信功能。控制部分由CPU、I/O模块以及通信模块3个部分组成,通过Arduino IDE程序和中移物联网(OneNET)客户端的控制,完成各个模块之间接口的数据传递和协同工作。该垃圾箱各模块及其所用的硬件如图4电子模块链接示意图和表2硬件参数所示。

表2 硬件参数
1.2.1 CPU
该项目采用Arduino Mega2560作为CPU,相较于Arduino UNO提供了更多的I/O口,它有54个数字输入/输出引脚(其中15个可用于PWM输出)、16个模拟输入引脚、4个UART接口、1个USB接口、1个DC接口、1个16 MHz的晶体振荡器、1个复位按钮。该设计产品需要40个数字输入/输出,10个模拟输入/输出,2个UART接口,采用12VDC供电,因此满足该项目要求。

图2 抽气系统运作示意图
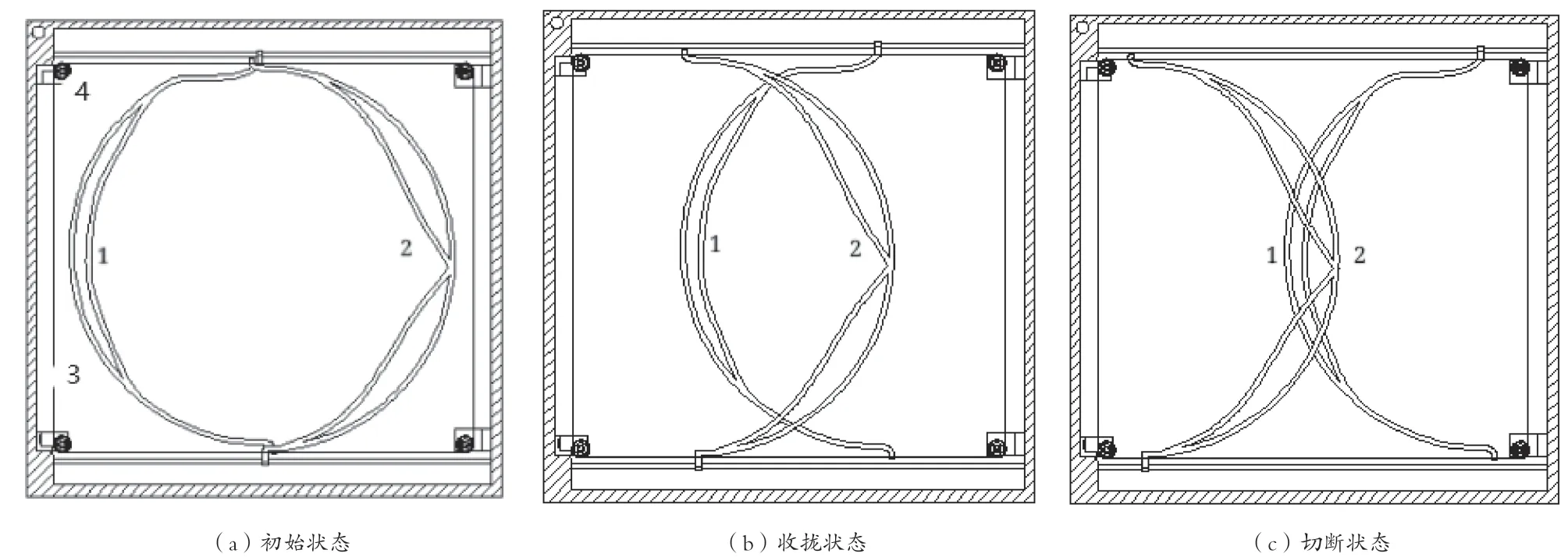
图3 切断装置运动流程图
1.2.2 IO模块
IO模块分为4个部分。1)微动开关提供位置限定,分布在20~39数字输入引脚,信号采用0、1数字量读取和输出。2)LD3320语音识别模块进行语音识别,分布在2~7数字输入引脚,信号采用组合串口输入输出。3)JQ8900模块进行语音播报,分布在18、19数字输出引脚,信号采用0、1数字量控制输出。4)SG90舵机和TT马达实现基本运动,分布在8~13数字输出引脚,信号采用PWM(脉冲宽度调节)输出,另外预留14个数字和6个模拟引脚作为扩展。
1.2.3 通信模块
ESP8266芯片是一款串口转无线模芯片,内部自带固件,操作简单,不需要编写时序信号等[3]。ESP8266-Wi-Fi实现实时通信,分布在0、1的UART引脚,采用标准串口协议,ST7789彩屏提供界面交互,分布在0~4模拟输入/输出。
2 软件设计
该项目初步设计了上下位机软件,上位机为客户端提供垃圾箱的基本状态信息,下位机则实时监控垃圾箱的工作状态以及相关用户引导提示。
首先装置上电后,对垃圾箱各模块进行初始化自检,如果不符合设定标准,将发出警报提示用户进行修复。垃圾箱自检正常后,完成ESP8266模块初始化接入OneNET云平台,垃圾箱开始进行上下位机运作,用户开始垃圾分类并请示语音播报反馈,通过对话引导用户进行垃圾分类。如果垃圾符合分类要求,将开启分类动作和显示屏实时动画。此时同步采集电源电压、垃圾袋储存余量、垃圾袋使用情况,并实时反馈到OneNET形成人机互动。对于不满足互动和分类要求的,将进行特殊处理,最后返回到ESP8266模块初始化接入OneNET云平台。进而完成一个响应周期,以此周而复始,实时响应远程电器使能命令,图5为垃圾箱程序设计流程图。
2.1 总体控制框架
各模块上电后,以Arduino Mega2560作为控制核心,通过RX、TX双线串口与ESP8266模块进行通信,通过MQTT协议与计算机进行通信,进而在客户端显示垃圾箱的基本特征。与此同时,相关数据实时显示在ST7789型1.44寸显示屏上,控制器直接对舵机、电机和继电器电热丝进行控制,并设计了对应的控制子程序。人机交互由LD3320语音识别模块通过串口接入的麦克风进行语音识别,JQ8900-TF语音播报模块通过4 W扬声器进行语音播报,该部分是通过对应的数据接口与CPU通信,图6为总体控制框架图。
2.2 语音识别垃圾智能分类
垃圾箱通过红外测距技术对是否有用户接近进行感应测量,如果没有人靠近,将会进入休眠状态,触发靠近中断检测程序。当用户接近或超过垃圾箱距离临界值时,语音识别、语音播报和机械控制功能待命,将进入人机交互剧本过程,该语音一共有两级指令,第一级是“小米渣同学”,第二级是“我要扔什么垃圾”。指令分等级,只有触发第一级指令才能进行第二级指令的触发,并且触发第一级指令后,有20 s的第二级指令机会时间,如果错过20 s识别时间,将会进入初始状态进行第一级指令判断。根据语音提示区分2类垃圾,完成第二级指令触发之后,对应垃圾箱上方的盖子将会自动打开,检测垃圾入箱之后,会在5 s后关闭盖子,完成整个垃圾分类投放过程。接下来检查垃圾袋里面的垃圾是否填充满,如果填充满,将会实现垃圾袋自动打包,接着自动安装新的垃圾袋,自动进入靠近检测。如果没有填满,也将自动进入靠近检测。
2.3 垃圾箱上位机智能物联(OneNET)
该项目使用ESP8266-Wi-Fi模块,采用Wi-Fi形式实现远程MQTT通信。Arduino从OneNET平台请求数据和发送数据给OneNET平台,都是发送特定的JSON格式数据。接收数据与发送数据的不同点在于,接收数据需要对OneNET平台返回的数据进行解析,提取出需要的值。手机端只需要在局域网中连接对应垃圾箱的IP与端口号,就可以与该垃圾箱进行通信[4]。配合手机和电脑,用户能通过客户端直接获取垃圾箱内部的各种实时监测信息,包括电源电压、垃圾箱储存余量以及垃圾袋使用情况等。
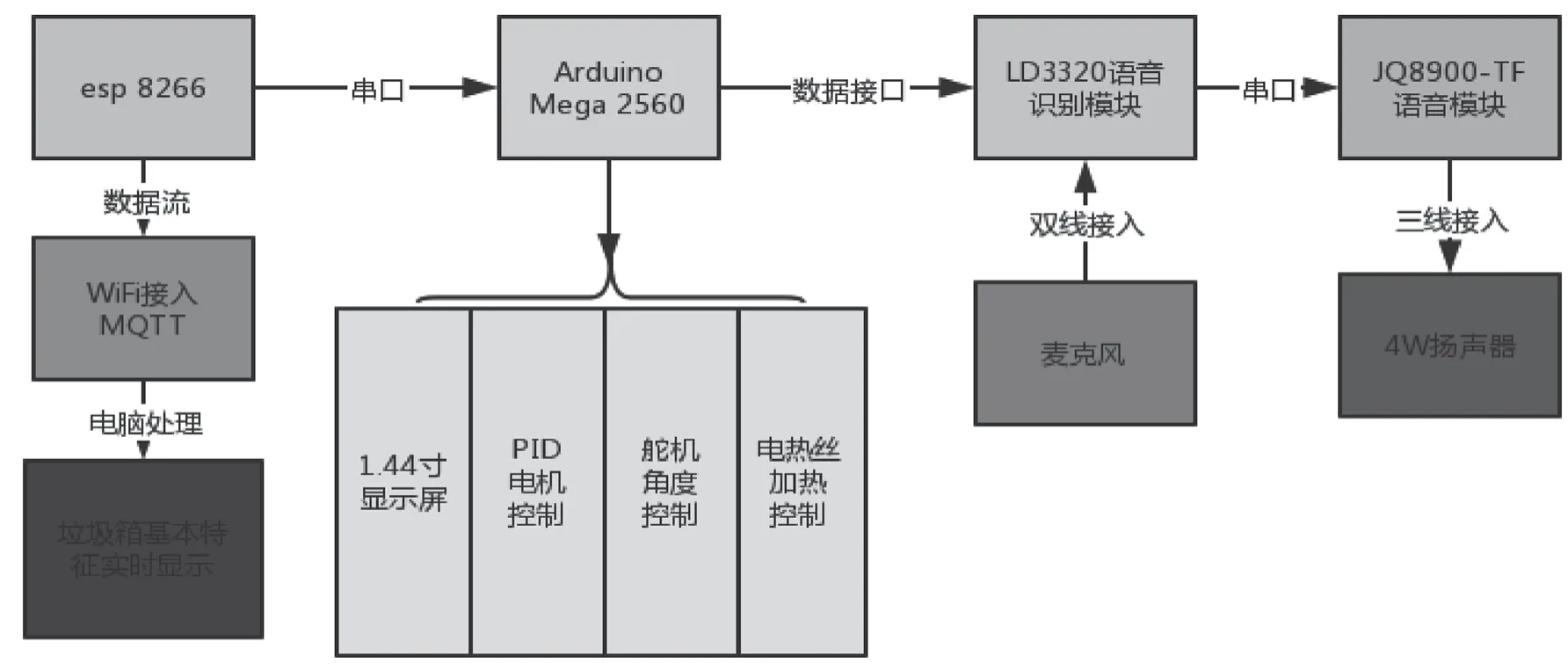
图6 总体控制框架图
3 结语
该文设计了一个基于语音交互功能的智能分类垃圾箱,基于语音交互功能实现垃圾的智能分类、自动套袋、打包以及封装等功能。同时结合物联网开发平台(OneNET),实现了电脑和手机端对垃圾箱的远程通信和控制功能。作为未来智能家居的一个有机组成部分,该产品的设计开发不仅可以为人类提供生活上的便利方便,而且具有极强的市场应用及推广前景。在实际应用过程中,该设计作品仍存在语音识别易受环境噪声干扰等问题,未来需要进一步改进。在将来的应用中,可以构建对智能分类垃圾桶的数据分析系统,对垃圾投放情况进行数据统计分析,为垃圾分类工作提供更加准确、智能化的服务。
