基于无穷范数的视觉伺服自适应控制方法
2020-12-24罗永超李石朋
罗永超, 李石朋, 李 迪
(1. 华南理工大学广州学院 电气工程学院, 广州 510800; 2. 华南理工大学 机械工程学院, 广州 510006)
0 引 言
随着近些年机器视觉和机器人控制技术的快速发展, 视觉伺服成为机器人领域的研究热点之一[1-4]。机器人视觉伺服是一种通过图像视觉空间变化与机器人构型空间变化一一对应进行机器人控制的技术[5], 但目前视觉伺服技术仍然受机器人手眼协调能力差、 控制速度周期性突变、 环境噪声等因素影响, 导致控制过程精度和稳定性等指标难以保证等问题[6]。针对上述问题, 人们提出了一系列的自适应增益算法改善控制系统的性能, 如Capolei等[7]提出一种自适应变增益的控制律, 该算法通过降低伺服任务的速度, 以达到控制过程更高的稳定性, 显然这种以牺牲系统收敛速度为代价的控制方法, 只能用在特定背景下的任务中, 不具有通用性。叶锦华等[8]提出了一种使用强化学习的自适应模糊控制器, 该控制方法对运动学控制器采用分流控制技术,防止系统运行初期的速度跳变, 对本体动力学和执行器动力学分别使用强化学习自适应模糊控制, 优化补偿常规方法难以解决的系统未知参数和非参数不确定性, 并利用鲁棒项消除未知外部扰动和模糊控制逼近误差对系统的影响, 提高了系统的控制性能, 该学习算法可以有效提高控制系统的收敛速度, 但在任务末期仍然出现了不规则的震荡情况。Luc等[9]通过设计一种双层控制结构, 研究了平面机器人在固定摄像机结构下的视觉伺服位置跟踪自适应控制问题, 然而该双层控制器结构复杂, 不易应用于其他控制系统, 有很大的局限性。
综上所述, 机器人视觉伺服系统由于多种因素影响而导致收敛精度和稳定性等方面性能不可靠[10], 已有研究对上述问题的解决方案有的只针对某一特定情况, 或有严格的外部环境要求, 未能有效解决伺服系统收敛过程稳定性和精度等方面问题。因此, 笔者根据无穷范数渐进变化的特点, 提出一种改善系统收敛速度、 增强系统渐进稳定的自适应控制方法, 对任务序列进行优化操作, 实现控制系统性能的改善。
1 基于位置的视觉伺服控制系统模型构建
图1是基于3维图像的位置视觉伺服控制系统的原理图。利用传感器所采集到的图像信号构建目标物体当前的位姿信息, 并将当前位姿与期望位姿对比后将二者的差值传输给视觉控制器, 形成闭环反馈[11-13]。

图1 基于位置的视觉伺服控制结构

e(q,t)=s(q,t)-s*
(1)
进行描述[15-16]。根据非线性方差最小化原理, 视觉伺服策略推导过程如下。
动态高斯-牛顿法方差最小化函数

(2)
将式(2)在(qk,tk)点展开泰勒级数

(3)
此时E(q,t)具有最小值, 对其求极值

(4)
其中o(Δ2)=E(q,t)是关于时间和关节角增量的二阶导数。对式(4)合并整理后离散化, 得

(5)


(6)

图像雅克比矩阵Uk是机器人关节角的函数, 采用“眼在手上”系统跟踪运动物体时, 相机会随着机器手而移动, 目标图像特征函数不仅是关于时间的, 还是关于机器人关节角的复合函数[17]。针对摄像机固定系统的无标定视觉伺服算法不再适合“眼在手上”系统。需要估计出由摄像机运动引起的图像雅克比矩阵的变化量。根据式(6), 令

(7)
可得

(8)
将式(8)整理, 得

(9)
所以针对“眼在手上”的结构, 关节速度

(10)
2 基于INOTS范数的自适应控制器设计
该控制器的设计目的是使目标函数[18]
e(t)=s(t)-s*
(11)
指数收敛到0点, 其中s(t)是系列图像中当前图像状态,s*是图像目标期望状态。自适应控制器的目标是使对象的输出渐近跟踪稳定参考模型的输出, 以响应分段连续有界输入[19]。Chaumette[20]对视觉伺服速度控制器的设计如下

(12)



(13)
定义。因为机器人实际是通过关节速度进行控制, 所以i=1时, 有一般解决方案

(14)


(15)
将式(14)计算得出的向量z代入式(15), 可得

(16)
式(16)可写为

(17)

令(e1,J1),…,(en,Jn)为第n个任务, 当i>j时, 任务ei不能干涉任务ej, 不失一般性, 可将任务序列推广到多个任务的情况, 有

(18)


(19)
3 仿真结果与分析

机器人与相机的相对位置结构为EIH(Eye-In-Hand)。虚拟相机视野中随机目标初始位置和期望位置如图2所示。
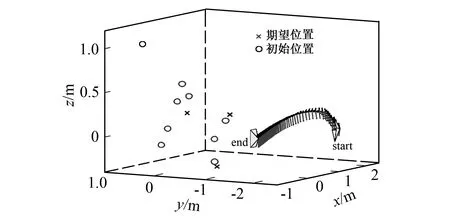
图2 伺服任务中目标位置与初始位置
为说明基于无穷范数自适应增益在控制系统中的作用, 除增益不同外其他条件相同。通过机器人末端速度及特征误差在不同视觉伺服算法下的变化情况, 证明笔者所提算法有效性。
图3是在3种不同增益表达下, 基于位置视觉伺服系统机械手末端速度变化情况,u、ν分别为机械臂末端在图像平面的线速度, 横轴表示时间t, 纵轴表示期望位置与初始位置的位移e。
通过对比可发现, 在一定的时间内, 固定增益下系统收敛速度较慢, 由图像变化可看出, 系统并未完成伺服任务。虽然传统自适应增益算法下的系统收敛情况则有明显的改善, 但也只是在设定的时间内完成了伺服任务。而在INOTS(Infinite Norm Optimization Task Sequence)自适应增益算法下不仅速度变化方向基本一致, 且快速收敛到零点, 在控制系统中收敛速度明显优于其他两种增益。
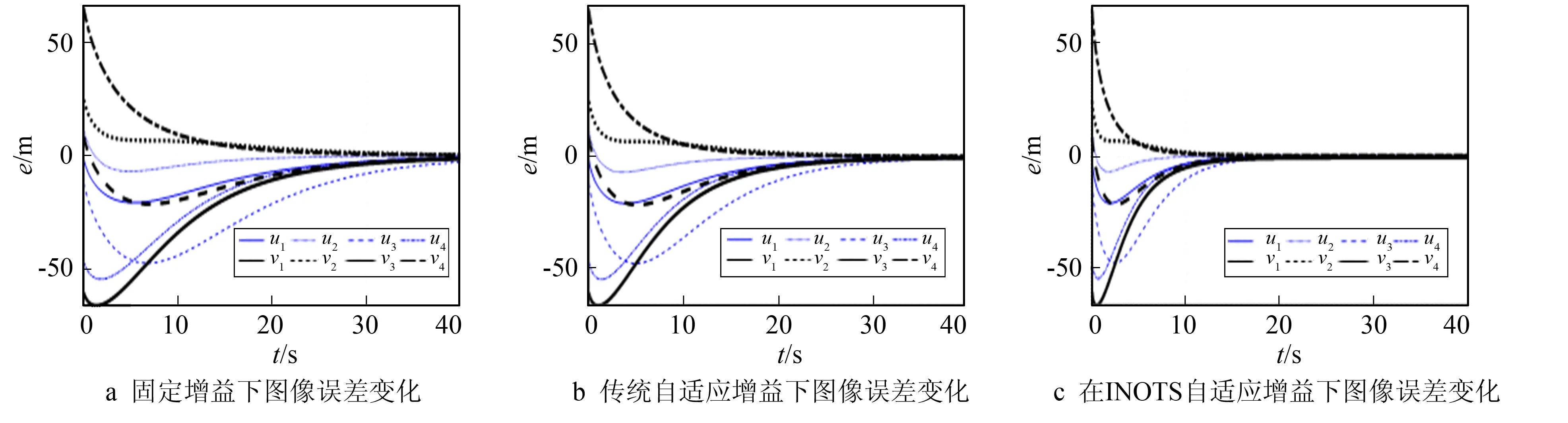
图3 不同增益下机械臂末端速度变化情况
为说明INOTS自适应增益算法在视觉伺服系统中的抗干扰能力, 在上述实验基础上, 根据工业环境中噪声特点, 增加系统白噪声n=0.5, 并在不同增益下对系统图像误差变化情况进行比较, 结果如图4所示, 其中u、ν分别为机械臂末端在图像平面的线速度。
分析图4可知, 受噪声的影响, 在固定增益及传统自适应增益下伺服系统虽然完成了控制任务, 但在伺服初期图像误差变化起伏明显, 出现了较大的震荡, 而在INOTS自适应增益下的控制系统图像误差变化平滑, 表现出对噪声更强的抗干扰能力, 证明了笔者算法对环境的适应性。

图4 噪声环境中不同算法下系统收敛图像误差变化情况
4 结 语
笔者根据无穷范数具有最优解的特点, 提出了一个以INOTS模型为基础的视觉伺服自适应增益算法, 通过在不同算法下对系统速度和图像误差变化情况的比较, 说明了该算法对视觉伺服系统收敛速度和环境适应性的积极影响。从仿真结果可以看出, 所提算法对视觉伺服系统的收敛精度和稳定性都有很好的改善作用。需要说明的是, 目标函数中增益系数对视觉伺服系统整体的控制性能有着较大的影响, 需根据系统特点选取合适的参数。在今后的工作中需在机器人实验平台上对上述算法进一步验证和改善, 并研究参数自动获取算法, 同时在此基础上对自适应增益算法做更深一步的研究。
