海底岩石静态处理技术研究
2020-12-23崔志云刘凭正
李 明 李 硕 崔志云 邵 斌 刘凭正 韩 影
中国石油管道局工程有限公司 天津 300272
随着国家海洋开发战略的不断扩大,海洋工程逐渐增多,尤其是海洋管道工程建设不断增加。然而,海洋管道下海点常常属于山体的延伸,因此管线下海一定范围内伴有大量的基岩。管道铺设之前,必须对其进行处理,形成管沟,以便进行管道埋设、保护。但是,随着国家对海洋环境保护的日趋严格,再加上部分海域近海点处存在大量的海洋生物养殖,要求基岩处理时必须做好保护措施,不能影响海洋生物的生长。传统的水下炸药爆破工艺因为会造成环境污染,影响周围海洋生物的养殖,已不再适用。而静态岩石处理就是针对类似工程的专用工艺。
可门海管项目就是典型的海底管道近岸端岩石静态处理项目。海底管道登陆点位置山体陡峭,水下基岩众多,属于较破碎坚硬岩,岩体基本质量等级为Ⅲ级,其单轴饱和抗压强度(Rc)推荐为67.3±20MPa。该区域鲍鱼等海洋生物养殖众多,且附近有野生黄花鱼保护区。炸药爆破必将造成大量的环境污染,严重影响鲍鱼等海洋生物的生长。这就要求必须使用静态破除的方式进行水下基岩处理,以减少对海洋环境的影响。
1 静态破除
静态破除也称物理破除,是采用抓斗挖泥船配备凿岩棒构成凿岩系统进行施工的工艺。其硬件设备包括抓斗挖泥船、凿岩棒和平板船等;软件包括DGPS 定位系统软件、Hypack 测量软件和疏浚工程电子显示系统等。
2 施工工艺
静态破除工艺主要由抓斗挖泥船、凿岩棒、钻孔船、平板船、抛锚艇,以及DGPS 定位系统和电子显示计算机系统构成。
2.1 平面控制点检验
将DGPS 天线放到各个控制点进行数据采集,把采集到的数据用XYPLOT 软件进行处理;然后将处理得到的平面坐标与控制点已知坐标进行比较,来验证平面控制点,以保证其误差符合《水运工程测量规范》要求。
2.2 施工区平面控制点的布设
按照施工要求,对待施工区域进行划分。各施工区选用最佳的定位控制点控制整个施工区。施工船定位采用GPS 定位系统,接收离工程施工区最近的差分站发射的固定频率数据链,以此作为定位的基准数据,精度为±1~3m。
施工测量定位系统工作流程如图1 所示。

图1 施工测量定位系统工作流程
3 施工方法
施工前,责任方主体必须进行各种手续办理,然后再开展相关工作。
3.1 船体定位
考虑到工程本身水域受限,且施工过程干扰较大,周边有海洋生物养殖及水下礁盘等影响船舶抛锚。因此,需要在岸上设置地锚,船舶采用一字锚,以减少水域使用面积。
3.2 钻孔船及抓斗挖泥船选择
水下岩石静态处理需要采用钻孔船进行钻孔(钻孔船钻机为移动式高风压钻机,钻孔效率高),钻孔船上配4 台钻机,以加快钻孔速度。孔距与排距按40cm×40cm控制,钻机钻头为129mm,超深1.5m,超宽2m。抓斗挖泥船配有30t 以上的重斗,斗容至少8m3。
3.3 凿岩棒选择
凿岩棒选择主要根据水下岩石形态、岩层的厚度和船舶设备的起重能力,并兼顾施工成本等因素。一般情况下,岩块硬度较大,岩层较厚时应采用重量较大的凿岩棒进行施工;岩层厚度较薄、岩石强度不大,并且只需凿一次就可以达到设计深度时,可选用重量较小的凿岩棒施工。
凿岩棒前端为斧头形状,因此对较大面积的岩盘有较好的效果。这种凿岩棒一般头部两侧呈楔形,并以弧形流线向凿岩棒中上部过渡,最后转变为直立式。这种形状有利于凿岩棒的能量只向两个方向传递,增加对岩土的破坏作用,并且在凿岩棒嵌入岩土过深时可减少棒身侧向的摩擦阻力,使凿岩棒更易提起来。详见图2。
2.4.5 血清样本中游离脂肪酸含量测定 取大鼠血清样本50 μL,按“2.4.2”项下方法预处理,并按“2.4.3”项下色谱与质谱条件进样测定,再按标准曲线法计算其中游离脂肪酸含量。
4 工程施工
工程施工中,使用钻孔船进行钻孔。钻孔船上配4台液压潜孔钻机,钻机钻头直径为129mm,钻孔船上配有GPS 导航定位系统。

图2 斧头型凿岩棒
钻孔船进场后先在合适的位置抛下尾锚,尾锚选择的位置应当不影响后续抓斗船的抛锚、凿岩和清礁等工作,尽可能降低交叉干扰,尽可能在不移动尾锚的前提下将施工区域的钻孔全部完成。由于近岸作业,钻孔船的前锚绑在事先在岸上预埋好的地锚上,形成前后一字锚,保证施工安全及效率。
钻孔船钻孔进行到一定阶段时,抓斗船进场。抓斗船安装35t 斧型凿岩棒,锤面焊齿,开始从海侧向岸按照一定的施工顺序进行锤击破碎已钻孔区域。
钻孔凿岩过程中,一定要注意布点的间距。布点间距要综合考虑凿岩棒的大小、形状,以及岩盘的层厚及硬度。一般情况下,凿岩棒的布点距离控制在斧头型凿岩棒厚度的1.5~2 倍左右。同时,要注意以下问题:
(1)详细了解分析岩层分布、潮流方向和大小,以及风向、风力等因素,再确定施工操作方法。
(2)备主机以及相关机电设备,确认操作气压表的空气压力;暖机运转时要确认发动机、液力变矩器、减速机和各鼓筒无异常响声和振动,发动机的排气颜色有无异常,燃油、润滑油、油压工作油、冷却水和操作气体等有无泄漏现象。
(3)查验GPS 定位电子显示系统上的方位数据及施工区数据;检查操作台上所有指示灯是否正常(报警指示灯全部熄灭),以及控制开关所处位置状态是否符合碎岩操作;检查各操作仪表指示值是否在正常范围。
(5)根据计算机屏幕的施工画面,将凿岩棒吊至开凿点位置(根据水流急缓程度和方向等因素进行位置的微调);扳动手柄,松脱离合器,凿岩棒自由落下。
(6)注视仪表显示的落下深度,在撞击底岩前的适当距离及时制动(制动时间、距离与提棒高度有关,高度越高,则制动越早)。
(7)观察凿岩棒撞击底岩后吊缆的松出状态,以便根据情况对制动的深度值进行调整,避免出现钢丝过度松出或者过度绷紧的现象;手柄扳至离合器合上位置,起吊凿岩棒,一般(必须)将凿岩棒吊起露出水面,以便观察棒体和连接钢丝的状况。
(8)根据GPS 导航画面和仪表指示,旋转(起伏)吊臂至下一个凿岩布点。
(9)与集控室保持联系,根据施工位置的变化情况进行船位移动。
5 凿岩冲击能计算
假设冲击锤锤岩时,从岩层上20m 处自由落下撞击岩石,其动能通过公式(1)进行计算。

式中:E——冲击锤自由落体撞击岩石的动能;
m——物体的重量;
g——重力加速度;
h——冲击锤的落高。
根据项目拟选用的各设备重量和高度等信息,计算确定E 为784 万J。
1m3空气的压力为0.1MPa,其能量为10 万J。因此,784 万J 能量可以产生7.84MPa 的压力,即冲击锤从20m 落下撞击岩石产生的压力为7.84MPa。
1kg 的TNT 炸药爆破产生的能量为419 万J。40t型重凿岩棒从20m 处落下撞击岩石产生的能量为784万J,相当于1.87kg 的TNT 炸药爆破产生的能量。
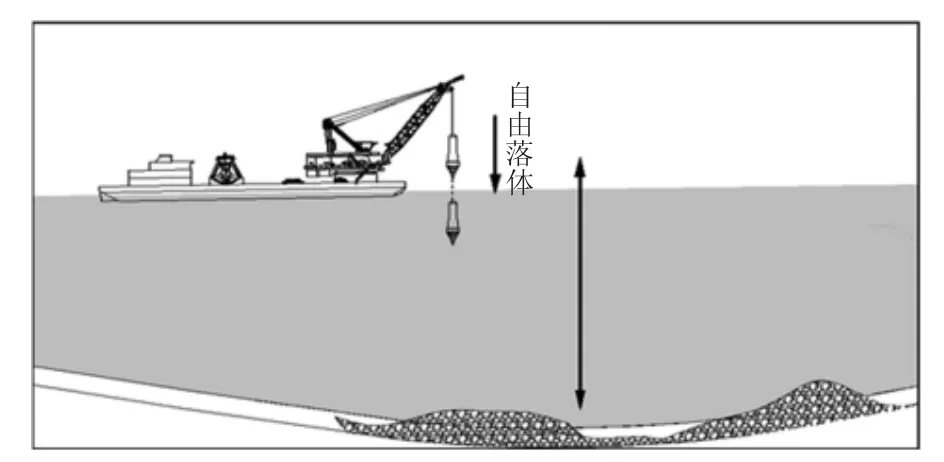
图3 凿岩棒自由落体示意图

图4 抓斗船采用凿岩棒水下作业图
6 总结
随着海洋工程的不断增多,海洋环境保护的要求日趋严格,静态岩石处理必将成为未来海洋岩石处理的主要施工方式。该工艺的应用,将为后续更多环保要求高的区域水下岩石处理提供参考。