影像采集参数对无人机遥感估测树高精度的影响
2020-12-23何少东黄洪宇陈崇成
何少东,黄洪宇,陈崇成
(福州大学地理空间信息技术国家地方联合工程研究中心,福州大学空间数据挖掘与信息共享教育部重点实验室,福建 福州 350108)
0 引言
植被冠层高度是一个重要的生态度量指标,在水文、 生态、 气象和生物物理等相关领域为研究者提供重要的信息[1]. 园林植物是城市生态系统中最为活跃的生物多样性因素,既可以防止土壤侵蚀,滞尘、 涵养水源等,又能调节温度,减少声、 光污染等. 但是,人工调查园林植物冠层高度的时间和人力成本较高、 效率较低. 因此,快速、 准确估测树高对于园林资源监测及管理具有重要意义.
机载激光雷达(light detection and ranging,LiDAR)已成功在森林和城市园林景观中进行植被冠层高度制图[2],但获取成本较高. 对于环境管理和生态领域的研究,往往需要重复进行LiDAR数据采集,高昂的价格制约了其发展与推广,同时获取时间和范围受空域政策限制,气候条件进一步限制了有效观测时间[3].
无人机(unmanned aerial vehicle,UAV)遥感具有低成本、 高时效、 高分辨率、 风险小等优势,在资源勘测、 气象观测等领域已有广泛应用[4]. 无人机技术获取的高分辨率图像和三维数据扩大了遥感的应用范围. 无人机遥感允许用户自定义空间分辨率,根据需要设计飞行区域、 航线、 高度,可用于森林监测和树木属性评估[5]. 近十多年来,国内外开展基于无人机影像树高估测工作的一些研究结果表明:阴天和晴天的影像采集环境对冠层高度的估计并没有显著性差异[6]. 增加航向重叠对于减小林冠高度误差和森林冠层的总体采样至关重要; 点云密度与航向摄影重叠密切相关,且高分辨率传感器产生更大的点云密度,对树高提取结果有很大的影响[7-8]. 此外,点云密度随地物覆盖类型发生变化:结构和纹理复杂的类型[6],如森林、 低灌木丛点密度较高; 结构简单且差异较小的类型,如道路、 草坪点密度较小. 但是若样地内生成点云的高度分布不变,点密度的增加就不会影响结果[9]. 对于郁闭度较高的区域,漏检的单木是由于树冠结构重建不完整所造成的[10],而对于开放的树冠结构区域,树高精度则较高[11]. 树冠形状也会影响树高估测的精度[12],树叶凋落时估测的树高精度更好[6],根据实际树高降低飞行高度能够有效改进树高估测精度[13]. 因此,对于自然条件、 传感器、 采集方案和处理过程等方面的差异,若缺乏这些差异对冠层高度影响的理解,可能会限制在未来的应用.
本研究基于不同重叠率、 地面分辨率(ground sample distance,GSD)的无人机影像处理后生成的密集匹配点云,从数字高程模型(digital elevation model,DEM)的精度评估、 点云的分布及点云密度、 单木检测及树高估测精度评估的角度探究不同影像GSD、 重叠率对树高估测精度的影响,以期为无人机在城市园林、 森林资源的调查及应用,提供优质数据采集方案的借鉴和参考.
1 研究区和数据来源
1.1 研究区概况
以福建省福州市福州大学旗山校区(119°11′E,26°3′N)为研究区,地理位置及样地分布如图1所示,其中梧桐树高及冠幅较小,在正射影像较难分辨,樟树底部存在灌木丛.

图1 研究区地理位置及样地分布位置Fig.1 Location of the study area and plot
1.2 地面数据采集
2019年3月至4月测量了5种不同树种的树高及冠幅,包括糖胶树(Alstoniascholaris)、 樟树(Cinnamomumcamphora)、 林刺葵(Phoenixsylvestris)、 秋枫(Bischofiajavanica)和梧桐(Firmianaplatanifolia),共实测116株,实测树高及冠幅统计量见表1. 使用瑞德RTS-820RM系列全站仪(±(3+2×10-6×D)mm)对树木位置进行记录; 在免棱镜模式下的悬高测量方法测量树高. 以皮卷尺测量树木东西、 南北方位的枝叶边界长度,取平均值作为实测冠幅. 树高的测量精度约3~5 cm; 冠幅的实测精度约30 cm. 此外,于2019年3月份采集无人机影像数据. 配合无人机航测的地面控制点(主要分布在较大的间隙区域),采用华测i70高精度GNSS接收机进行测量,RTK模式下的平面精度为±(8+1×10-6×D)mm,高程精度为±(15+1×10-6×D)mm. 地面控制点坐标系为CGCS2000(China Geodetic Coordinate System 2000).
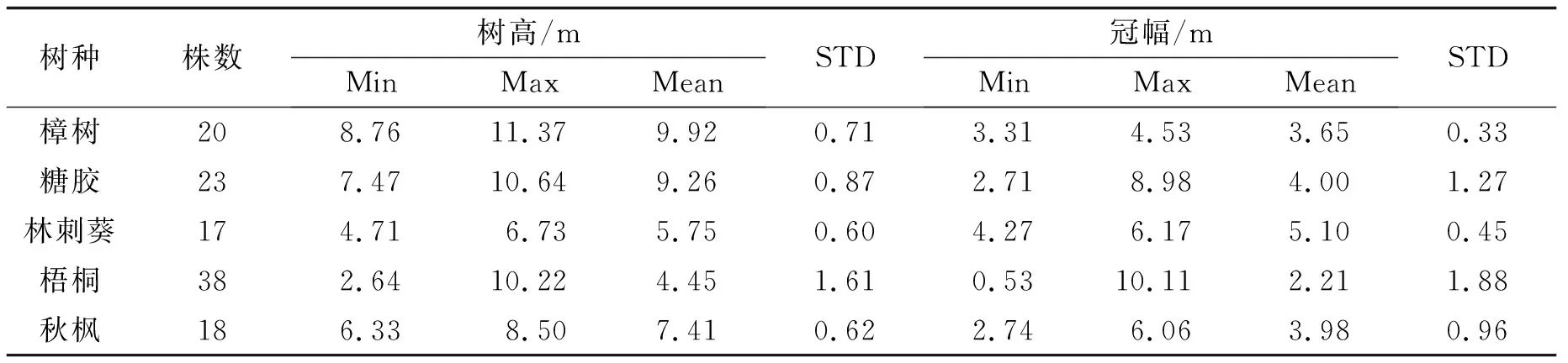
表1 各树种的树高及冠幅实测统计表Tab.1 Statistics of field measurement of each species
1.3 无人机影像采集与处理
1.3.1无人机影像采集
使用的无人机设备型号为大疆精灵4 Pro,搭载一体化云台相机,云台俯仰角度范围为-90°~ +30°,相机镜头参数为FOV 84°,等效焦距为35 mm,有效像素为2 000万. 在3月12日采集两个架次的无人机影像GSD分别接近5和10 cm,航向重叠率均为90%; 旁向重叠率均为80%(以下称为5-90-80数据集和10-90-80数据集),3月15日采集一个架次的无人机影像GSD接近5 cm,航向重叠率为65%,旁向重叠率为60%(以下称为5-65-60数据集). 起飞及降落地点略有变化,采集时间接近正午,天气状况为晴天或多云、 无风或微风情况.
1.3.2无人机影像处理
无人机影像处理采用Pix4Dmapper软件,主要步骤如下:①导入影像(JPG格式),并利用地面控制点校正地理参考坐标. ②进行相机自检校计算及内外方位元素优化,空中三角测量以及光束法区域网平差生成稀疏点云. ③生成稠密点云、 数字正射影像(digital orthophoto map,DOM).
处理后的质量报告表明:3个数据集经地面控制点校正影像后,水平方向(X/Y)地理参考RMSE为0.012~0.056 m,垂直方向(Z)的RMSE为0.020~0.177 m; 地理参照的平均RMSE为0.020~0.085 m; 平均重投影误差在0.163~0.181 px. 水平与垂直方向的误差均小于3倍GSD,为后续实验提供位置精度良好的数据基础.
2 研究方法
本研究的方法流程如图2所示,分为3个步骤:点云预处理、 树高提取和精度评价. 为减小GSD、 重叠率外的其他因素对树高估测误差的影响,每个数据集在Pix4Dmapper软件中的处理参数均设置为一致; 此外,点云预处理的去噪、 地面点滤波方法、 点云高程归一化等处理过程中涉及的参数也相同; 不同数据集相同的样地设置的搜索窗口大小也一致.

图2 研究方法流程图Fig.2 Flow chart of research technique
2.1 数据预处理
预处理分为3个步骤:① 利用LAStools软件的lasnoise模块去除影像点云中的噪声点. ② 采用Zhang等[14]提出的布料模拟滤波(cloth simulation filter,CSF)算法将点云分类成地面点与非地面点. 分类后的地面点云通过不规则三角网(triangulated irregular network,TIN)线性内插生成DEM. ③ 将点云Z值与其在DEM对应位置的高程值相减得到高程归一化点云,从而消除地面起伏对树高估测的影响.
2.2 单木检测及树高提取
无人机影像匹配点云数据与LiDAR点云数据都为离散化的三维点集,且通常是基于冠层高度模型(canopy height model,CHM)平滑后使用局部最大值算法[15]提取单木的顶点位置,但在对三维点云栅格化生成CHM时的格网插值及窗口平滑的过程中会导致树木部分细节丢失并造成误差. 因此直接对影像点云数据进行单木检测研究,消除插值及平滑过程中对树高提取的误差. 基于点云的局部最大值算法由RStudio实现,具体步骤如下:① 输入高程归一化的影像点云. ② 根据样地平均实测冠幅大小,经过多次实验,设定合适的窗口尺寸(见表2). ③ 遍历点云,判断每个点在以其为中心的搜索窗口内是否为最高点. 此外,根据实测树高设置树高阈值hmin,若最高点高于hmin则标记为候选单木顶点. ④ 标记所有满足条件的树顶点,进行编号并附加树顶点x、y、z坐标属性,其中x、y为该树的位置,z为树高.

表2 各样地搜索窗口尺寸及树高阈值设置Tab.2 Search window size and height threshold setting of various species (m)
2.3 精度评价
2.3.1单木检测精度评价
全站仪测量树木茎干的位置,形式为点,单木检测由单木顶点表示,其形式也为点,因此采用“点对点”方式对单木的检测结果进行评价[16]. 将实测茎干的位置作为参考,与提取的单木顶点进行匹配:若实测茎干位置附近1~2 m半径范围内存在唯一1个单木顶点,则为正检(true positive,TP); 不存在单木顶点则为漏检(false negative,FN); 存在1个以上单木顶点,则为错检(false positive,FP).
单木检测结果根据Li等[17]使用的召回率r(recall)、 准确率p(precision)和F测度(F-score)进行评价,其公式分别如下

(1)

(2)

(3)
其中:召回率r表示正检株数占实测株数的比例; 准确率p表示正检株数与检测的株数之比; F测度是对召回率r和准确率p的综合描述.
2.3.2DEM及树高精度评价
将实测茎干位置的高程点H作为检查点,提取该点在DEM的高程值h,计算均方根误差RMSEH及平均误差MEH来评估DEM的精度,计算公式如下

(4)
其中:均方根误差是估测高程hi与实测高程Hi偏差的平方与实测高程点个数n比值的平方根.
(5)
其中:平均误差为估测高程hi与实测高程Hi之差的和再平均.

(6)

(7)

3 结果与讨论
3.1 DEM精度评价
各树种在不同数据集下的DEM精度评估如表3所示(梧桐样地因测量仪器操作故障且样地已被破坏,所以未做评估). 对于平均误差(ME),5-90-80数据集主要为系统高估的趋势,10-90-80及5-65-60数据集则主要为系统低估的趋势. 除樟树样地外,其余样地在5-90-80数据集的DEM精度均为最好. 在5-65-60数据集中,除秋枫样地DEM精度较差,其余样地的DEM精度与10-90-80数据集相差无几.

表3 各树种的DEM精度评估Tab.3 Accuracy evaluation of DEM of each species
3.2 树木点云分布及点云密度
对不同数据集的树木的点云分布进行比较,使用不同颜色表示(见图3),且添加实测树高以显示真实树顶的位置,值得注意的是树顶和树干的位置会有一些偏移. 在5-65-60数据集中,缺失了许多株完整树木,且与实测的树高(红色)存在较大的差距. 10-90-80数据集中,冠层点云较为稀疏,但树木仍然能被较为完整地重建,与实测树高的差异较小. 此外,树高及冠幅较小的梧桐树种,也存在多株未被重建的情况. 5-90-80数据集中,各个样地重建更为完整,与实测树高的差异也较小.
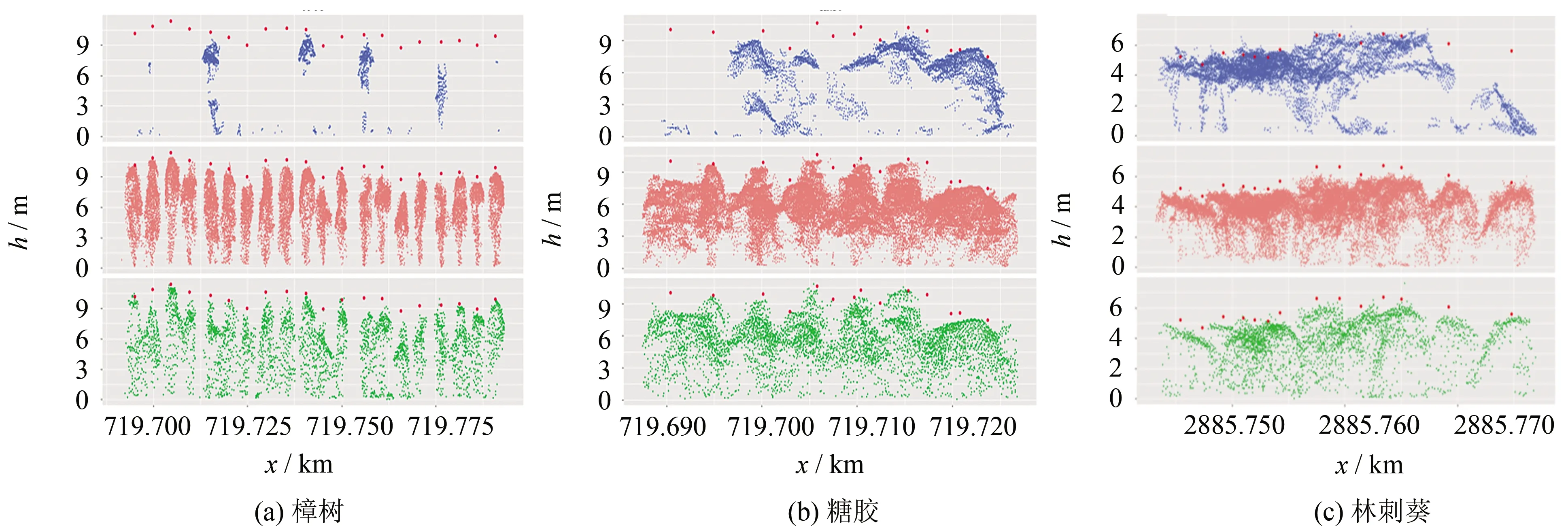
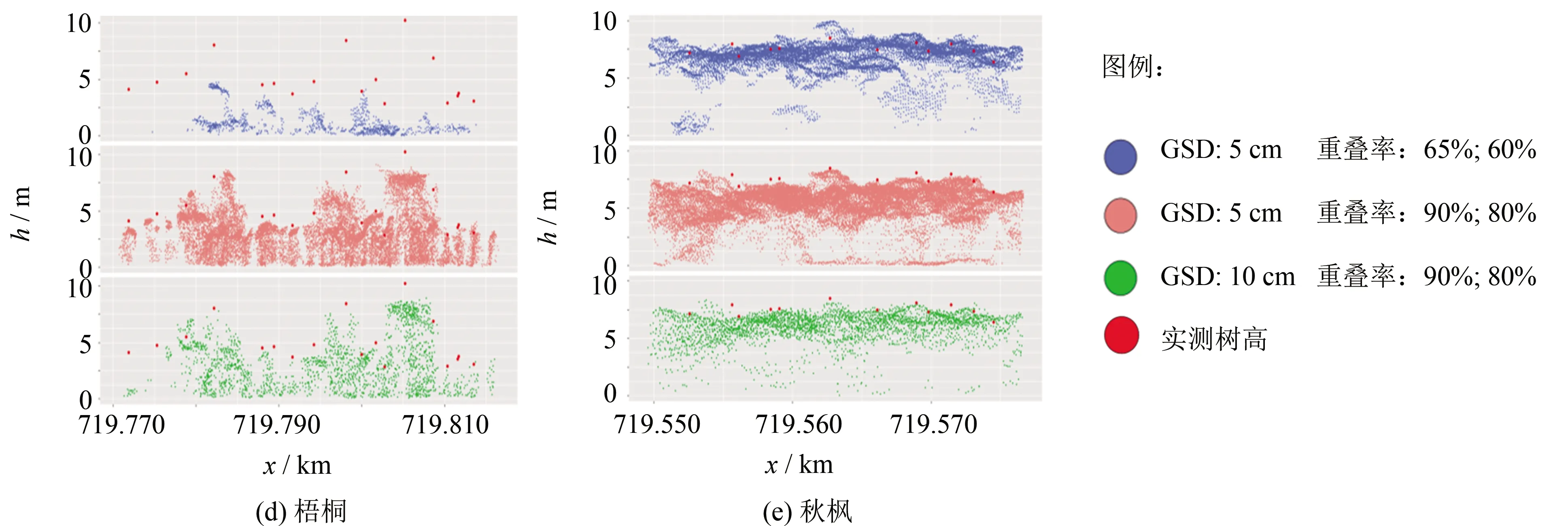
图3 不同GSD及重叠率下树木的点云分布. Fig.3 Point cloud distribution of trees with different GSD and overlap
为探究不同重叠率及GSD下树木区域的点云密度差异,剪裁各样地的高程归一化点云并滤除地面点云,统计各样地的点云密度,如表4所示. 当GSD均为较小的5 cm时,重叠率高时,点云密度较高; 当重叠率均为较高的90%、 80%时,GSD较小时,点云密度也较高.
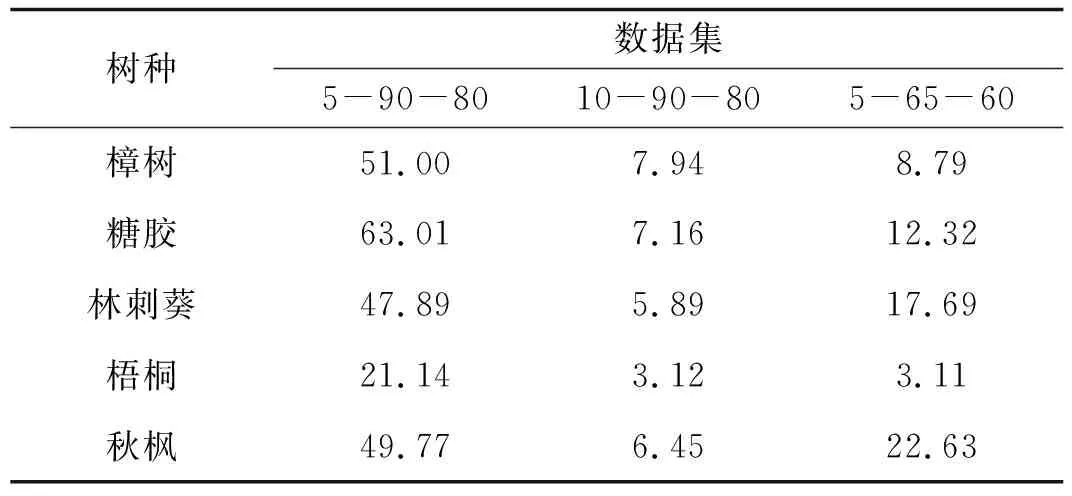
表4 各树种点云密度统计表Tab.4 Statistics of cloud density of each species
3.3 单木检测、 树高估测的精度评价
将提取的单木顶点位置与实测的单木位置在正射影像上进行匹配,统计单木检测的F测度; 计算提取的树高与实测树高的RMSE、R2、 rRMSE、 ME. 表5统计了各树种在不同GSD、 重叠率下的树高估测精度评价因子. 图4为树高总体分布差异箱型图,N为株数,红色点为每个数据集的平均树高.
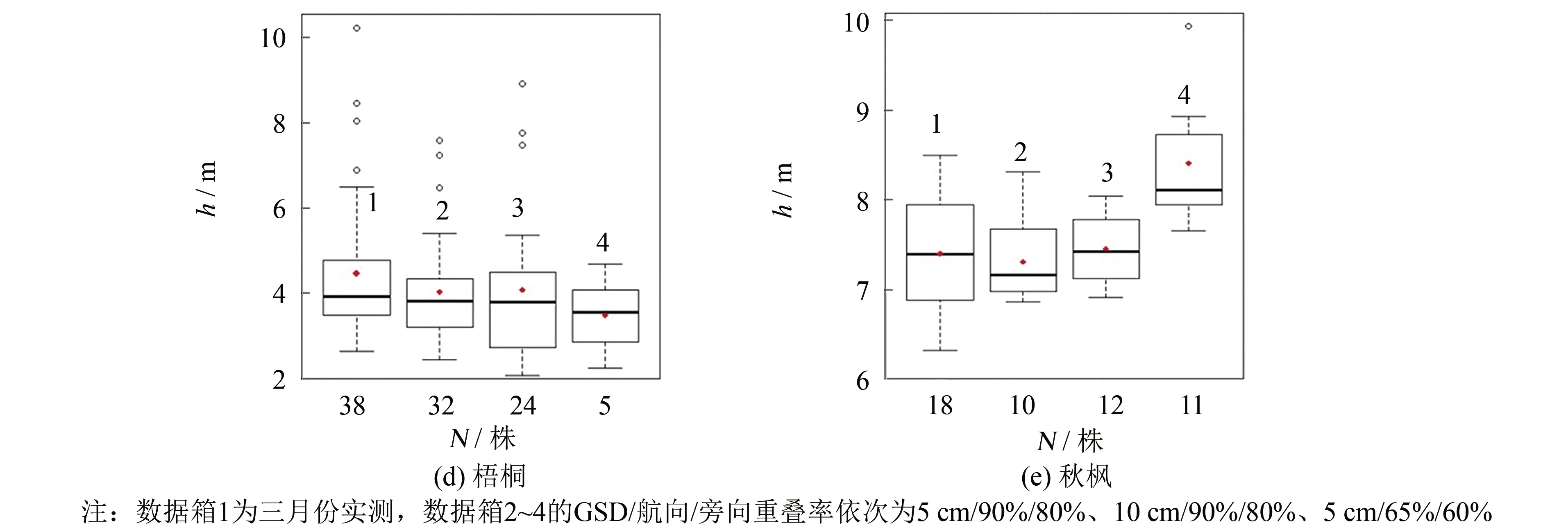
图4 各样地实测树高与估测树高箱型图Fig.4 Box-and-whisker plot of measured and estimated tree heights at three dates for species
各树种在不同的影像GSD和重叠率下,树木重建的完整性及树高估计精度存在明显差异. 5-90-80数据集重建最为完整且细节丰富,单木检测的F测度为0.67~0.98,树高RMSE为0.45~0.69 m,实测与估测树高的总体分布差异较小; 10-90-80数据集重建相对完整,细节略微匮乏,F测度为0.75~1.00,树高RMSE为0.38~0.97 m,总体分布差异也较小; 5-65-60数据集重建结果残缺不全,郁闭度较低的样地(樟树、 糖胶、 梧桐)的F测度骤然降低到0.23~0.36,树高RMSE为0.53~1.73 m,低矮的梧桐(平均树高为4.45 m)树高RMSE超过了1.7 m,秋枫树高RMSE将近1 m. 总体分布差异较大. 表5中的树高平均误差表明5-90-80与10-90-80数据集均低估了树高,这与其他相关研究的结果一致,而5-65-60数据集则多为高估且误差较大,此采集参数用于树高的估测是不理想的.
3.4 讨论
基于无人机的树高估测中,影像点云不像激光雷达具备一定的植被穿透性,植被密集覆盖的情况下,部分地面信息可能由于冠层的遮挡而丢失[18],但对于裸露的部分,不同重叠率及地面分辨率组合对地形特征点的识别能力有所差异,造成不同的DEM误差, 进而影响冠层高度的准确性. 根据表3中的DEM精度评估结果,平均误差将被引入到相应的树高估测. 结合表3及表5,较高重叠率及较小的GSD有助于减小DEM误差,且树高估测精度也较高. 但樟树在GSD较小时的树高RMSE为0.58 m,DEM的RMSE为0.44 m是主要误差来源,这很可能是由于树干周围存在较多灌木丛,灌木丛的点云密度增大,容易被归为地面点导致较大的DEM误差,在这种环境下将不适合采用较小GSD的飞行,若去除灌木点云再进行地面点滤波将有可能提高DEM的精度从而提升树高的估测精度. 此外,冠层郁闭的秋枫在低重叠率(5-65-60)数据集中,冠层间隙底部的地形特征点难以生成导致较大的DEM误差(RMSE=0.97 m),继而引起树高的精度较低(RMSE=0.98 m).
在基于无人机树高估测的研究方案设计和数据分析过程中,必须考虑到不同树种的形态结构、 郁闭度、 地面情况等因素, 来为无人机数据采集时影像的GSD及重叠率做合理的设置,以提升树高的估测精度. 未来的工作将考虑选取不同的环境条件,兼顾工作量、 精度等,探索具有普适性的GSD及重叠率,为相关工作提供参考.
4 结语
本研究基于UAV影像点云,对树高估测精度进行分析,对不同重叠率及GSD的UAV影像生成三维点云的特性和树高精度的影响进行研究,提出利用无人机遥感技术可能输出的数据质量范围的见解. 实验结果表明:较小的GSD及较大的重叠率不仅生成的点云密度均较高,而且当底部无灌木丛时有助于减小DEM误差; 重叠率较大,树木重建更为完整,单木检测的F测度较高; 较小的GSD则能够重建更多的细节,树高估测精度更高,尤其是对于高度及冠幅较小的梧桐(RMSE=0.45 m). 从本研究中得出的结论对于使用无人机影像的森林管理和研究应用具有参考和借鉴作用.
