后装压缩式垃圾车压缩装置的运动仿真分析
2020-12-22孙洪良
孙洪良
(江苏悦达专用车有限公司,江苏 盐城 224007)
0 引言
压缩式垃圾车是一种拥有较高工作效率的收集和运输垃圾的专用车辆,由于其密闭性较好,在运输过程中基本能够避免液体垃圾撒漏而造成二次污染,因此可用于远距离运输,而且通过自身的压缩装置能够将收集到的垃圾进行压缩处理,减少垃圾所占体积,提高经济效益.基于这些优势,压缩式垃圾车已经成为城市环境卫生部门的优选设备.压缩装置是压缩式垃圾车的重要组成部分之一,决定了压缩式垃圾车的工作效率和使用寿命.通过运用Siemens NX/Motion 对压缩装置进行运动仿真分析,能够对压缩装置的运动特性进行直观而准确的分析.
1 压缩装置
1.1 压缩装置的工作过程
压缩装置是压缩式垃圾车最为核心的工作部分,主要负责将装入压缩式垃圾车后车厢斗的垃圾全部刮入车厢内部,再与车厢内部的推板一起进行压缩活动[1].
压缩装置包括滑板、刮板、驱动油缸和推板这四个部件,其中滑板、刮板和驱动油缸在装填箱内.刮板与装填箱底需紧密贴合,不能留有过大的间隙,防止垃圾被遗漏在装填箱底,但间隙也不能过小,防止造成刮板与装填箱底部干涉变形,正常控制在5~10 mm.
推板一开始处于靠近装填箱的一端,装入垃圾后,刮板紧贴装填箱底将垃圾全部刮起,滑板向上滑动,刮板中的垃圾就会进入到车厢内部,和推板有所接触,由滑板和推板形成压缩空间进行压缩.推板处于车厢内部早已布置好的滑轨上的,滑板压缩垃圾,垃圾给推板施加作用力,使其在滑轨上进行运动,直至车厢内部装满垃圾为止[2].
1.2 压缩装置三维模型
垃圾从装填箱后端的入口处倒入,由推板、滑板和刮板等共同作用进行压缩,将垃圾推入车厢压实.压缩装置三维模型如图1所示.
2 压缩装置运动仿真分析
2.1 运动仿真驱动
运动驱动是在运动仿真分析过程中赋予在运动副上控制运动的参数,是有关联的连杆能够按照预期进行运动的动力来源[3].
本次运动仿真用到的主要是 STEP 函数.通过对预期运动进行详细分解之后,决定将驱动分别加在压缩装置的外壳箱体和滑板的滑块运动副J003、驱动油缸和刮板之间的旋转运动副J004 以及推板和外壳箱体的滑块运动副J006 上,从而模拟压缩装置的工作情况[4].
根据实际工作中正在被广泛使用的各种压缩式垃圾车类型,为本次仿真运动添加下列驱动函数:
(1)添加在J003 滑块运动副上的驱动函数
第一步:滑板停在导轨0 mm 的位置等待刮板向下旋转刮动到一定角度.
(STEP(time,0.0001,0,0,1)+STEP(time,4.9701,0,4.97,-1))*0
第二步:滑板带动刮板以158 mm/s 的速度向上滑动758.4 mm.
(STEP(time,4.9701,0,4.97,1)+STEP(time,9.7701,0,9.77,-1))*POLY(time,4.97,0,158)
第三步:滑板停在导轨758.4 mm 的位置等待刮板向上旋转刮动到一定角度.
(STEP(time,9.7701,0,9.77,1)+STEP(time,14.7401,0,14.74,-1))*758.4
第四步:滑板带动刮板以158 mm/s 的速度向下滑动758.4 mm.
(STEP(time,14.7401,0,14.74,1)+STEP(time,19.5401,0,19.54,-1))*POLY(time,14.74,758.4,-158)
(2)添加在J004 旋转运动副上的驱动函数
第一步:刮板以12°/s 的速度向下旋转刮动到59.64°.
(STEP(time,0.0001,0,0,1)+STEP(time,4.9701,0,4.97,-1))*POLY(time,0,0,12)
第二步:刮板停在59.64°的位置随着滑板向上滑动.
(STEP(time,4.9701,0,4.97,1)+STEP(time,9.7701,0,9.77,-1))*59.64
第三步:刮板以12°/s 的速度向上旋转刮动到59.64°.
(STEP(time,9.7701,0,9.77,1)+STEP(time,14.7401,0,14.74,-1))*POLY(time,9.77,59.64,-12)
(3)添加在J006 滑块运动副上的驱动函数
第一步:推板停在3300 mm 的位置等待刮板开始刮动的动作;推板以25 mm/s 的速度向车厢内滑动.
(STEP(time,0.0001,0,0,1)+STEP(time,0.1001,0,0.1,-1))*3300
(STEP(time,0.1001,0,0.1,1)+STEP(time,9.7701,0,9.77,-1))*POLY(time,0,3300,-25)
第二步:推板停在3058.25 mm 的位置等待尾部压缩机构完成一个流程.
(STEP(time,9.7701,0,9.77,1)+STEP(time,19.5401,0,19.54,-1)) *3058.25
2.2 仿真结果与分析
制定解算方案是进行运动学仿真和分析之前的最后一个步骤,主要功能是用来定义运动仿真的整个过程时间以及步数这两个主要参数.
通过叠加计算所有步骤的总时间,设置压缩装置压缩垃圾的解算方案时间是19.54 s,正好可以完成一个完整的刮板旋转刮动垃圾,随着滑板向上滑动,压缩完成之后再次回到原始位置的过程.设置步数为50 步,步长为0.01 s.解算分析的过程完成之后,就可以直接用动画的形式清晰地表现出压缩装置的压缩运动仿真过程[5].
完成解算之后,在L001 刮板、L003 滑板和L005 驱动油缸这三个连杆上分别标记一个标记点,便于观察这三个连杆的位移以及速度.通过SIEMENS NX 运动仿真中的作图输出功能,将三个连杆的分析数据以图表形式输出.
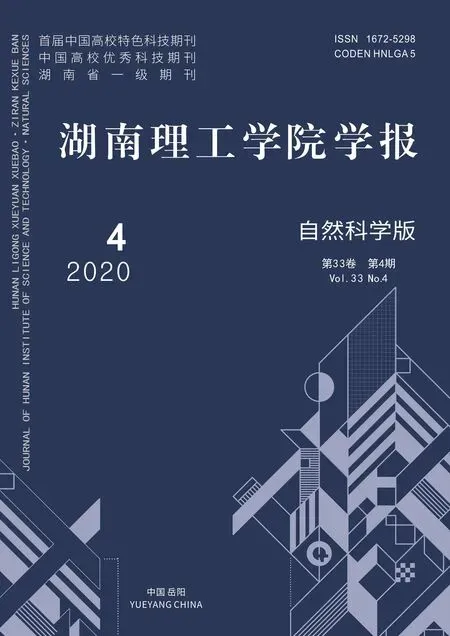
L001 刮板的速度-角度幅值如图2所示.可以看出,L001 刮板在运动过程中一直以12°/s 的速度刮动,其运动轨迹较为规律且平稳,符合预期的设计要求.
L003 滑板的位移幅值和速度幅值如图3和图4所示.滑板在刮板向下刮动的时间段内是静止的,在刮动结束之后,滑板带动刮板以158 mm/s 的速度向上滑动758.4 mm.最大速度仅为158 mm/s,满足运动轨迹和位移要求,其速度平滑,没有突变,不会产生冲击,符合装置的实际运动情况.
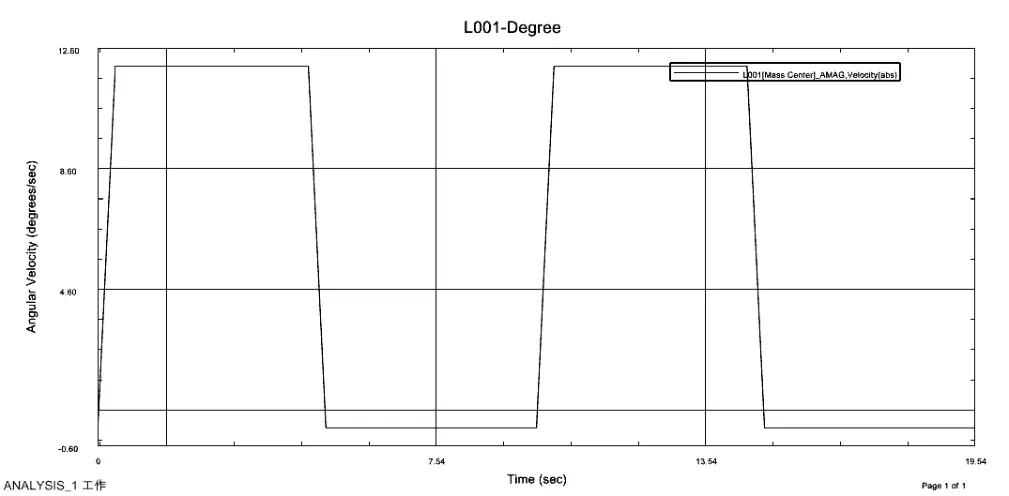
图2 L001-速度-角度幅值
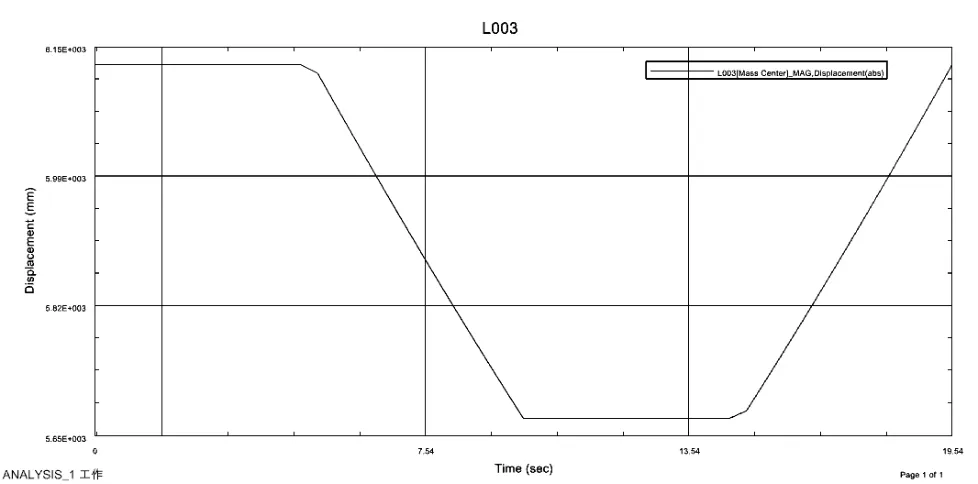
图3 L003-位移幅值
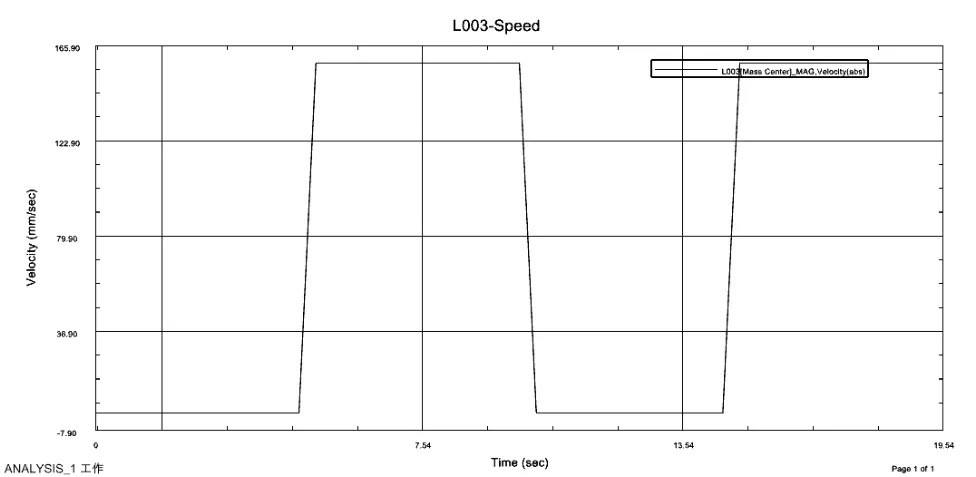
图4 L003-速度幅值
L005 推板的位移幅值和速度幅值如图5和图6所示.推板开始时停在原地等待刮板开始动作,紧接着在垃圾的推动下以25 mm/s 的速度向车厢内滑动,然后停在3058.25 mm 的位置等待整个流程的结束.整体运动过程极为平稳,速度较慢,符合其被动压缩垃圾的设计目的,符合实际情况.
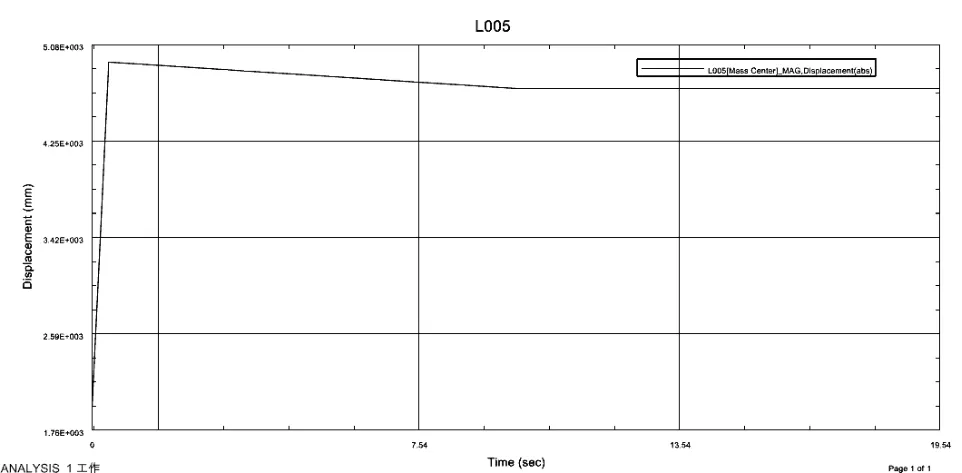
图5 L005-位移幅值
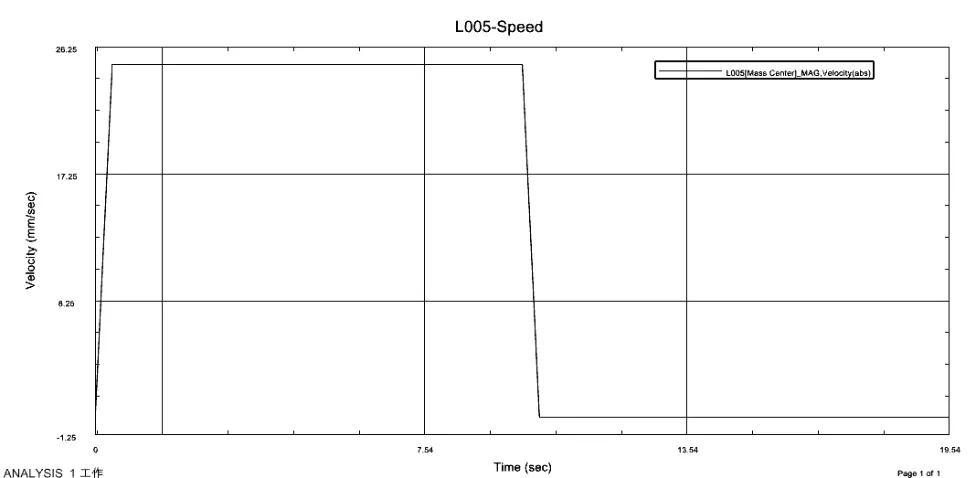
图6 L005-速度幅值
综上所述,整个运动过程中刮板、滑板和推板的运动速度都很平稳且具有一定规律,并没有突变情况的发生,符合设计要求[6],能够保证正常的工作流程.
3 结语
本文通过对压缩式垃圾车压缩装置的模型进行仿真分析,能够有效提升压缩装置的设计质量,在这个基础上对垃圾车压缩装置的设计进行改善,能提高垃圾车压缩装置的刚度性能,延长预期寿命,增加经济价值.通过对压缩式垃圾车压缩装置的模型进行创建和仿真,在软件平台上进行模拟,避免了现实中不必要的尝试,减少了垃圾车压缩装置的开发成本.