民用飞机控制律对俯仰机动平尾载荷影响分析
2020-12-22阮文斌闫中午符梁栋
阮文斌 闫中午 符梁栋
(上海飞机设计研究院,上海 201210)
0 引言
首先,本文对CCAR-25 部25.331(c)条规定的两种俯仰机动情况进行分析,并针对CCAR-25 部25.331(c)条与欧洲的适航认证规范(Certification Specification 25,简称CS-25)条款[2]存在的差异进行对比分析。
其次,国内大多数飞机载荷设计专业在计算机动载荷时,将条款要求的座舱操纵器件输入规律当作操纵面运动规律使用,忽略和回避了控制律的响应特性。近年来,随着控制律在现代飞机上的大量应用,并且复杂程度也逐步增加,导致飞机控制律特性在机动载荷计算中起到至关重要的作用。由于飞机的机动运动取决于操纵面的运动激励,而操纵面的运动又由驾驶员的动作和控制律特性共同确定。因此,在计算机动载荷时,如果忽略控制律的作用,用座舱操纵时间历程代替操纵面偏转时间历程,对于带有不同控制律系统的飞机来说,视操纵规律的不同,所计算出的机动载荷或保守或根本不对[3-6]。
针对上述情况,本文首先对CCAR-25 部25.331(c)条规定的两种俯仰机动情况进行条款对比理解,然后结合纵向运动动力学方程,对两种俯仰机动考虑控制律前后分别进行机动仿真计算,并对飞机响应及平尾载荷计算结果进行分析比较,进而表明飞机控制律对飞行机动载荷的重要影响。
1 运动动力学方程
俯仰机动是由CCAR-25 部[1]第25.331(c)条规定的一种机动情况,具体包括非校验机动和校验机动两种情况。按规范定义考虑俯仰机动时,首先求微动平尾配平的初始平衡状态的载荷,根据纵向力与力矩平衡可得如下运动方程[7]:

式中,CLato为无尾飞机升力系数对迎角的导数;CL0to为无尾飞机在a=0 时的升力系数;Cmato为无尾飞机俯仰力矩系数对迎角的导数;Cm0to为无尾飞机在a=0 时的俯仰力矩系数;a 为迎角;g为重力加速度;q为速压;S 为机翼面积;m为全机重量;Lha为平尾尾力臂;ΔxCC=0.25·CAW-xCC为飞机重心与气动焦点的距离;CAW为机翼平均气动弦长;MEN、MDR分别为发动机推力和飞机阻力产生的俯仰力矩。
由上述方程可求出初始平衡状态时的迎角和平尾微动角。再由机动响应可得如下增量微分方程组[7]:

初始条件:t=0 时,γ=θ=ωz=0。式中,ΔF表示由于机动响应带来的法向气动力增量;ΔM表示由于机动响应带来的俯仰力矩增量;γ为爬升角;θ为俯仰角;ωz为俯仰角速度;V∞为无穷远处来流速度;Iz为俯仰转动惯量。
根据升降舵偏转速率及俯仰操纵器件操纵规律,按方程求出整个俯仰机动过程中飞机响应时间历程,进而可得平尾载荷[7-8]。
金湖县在基本农田以及耕地的保护方面,需要在确保现有基本农田在数量不减少、用途不改变的基础上,质量有所提高。建设用地上,金湖县要统筹安排发展用地,实现集聚、集约发展。同时,加强对农业污染的控制,大力发展高效以及生态农业,发展高效规模养殖、无公害立体养殖、养殖废弃物无害化处理等生态养殖技术,提倡有机肥和无机肥平衡使用技术,加快建设一批规模大、水平高、带动力强的生态观光农业园,并积极推动绿色、有机食品基地的建设,大力开展绿色、有机农产品认证,探索适宜的种养结合等循环农业模式,降低农药、化肥的使用量[4]。
根据CCAR-25 部第25.331 条规定的俯仰机动要求是飞行员移动俯仰操纵器件,在不考虑控制律的情况下,升降舵舵面根据座舱俯仰操纵输入规律在规定的时间内线性增加到限制偏度,而考虑了控制律后,升降舵舵面根据飞机响应状态和杆位移反馈计算得到升降舵舵偏,然后进行运动动力学方程仿真求解,得到整个飞机机动响应时间历程。本文中对俯仰机动考虑控制律前后分别进行仿真计算,并对飞机响应及平尾载荷计算结果进行分析比较。
2 控制律对非校验机动影响分析
非校验机动是CCAR-25 部第25.331(c)(1)条规定的一种俯仰机动情况。该俯仰机动初始速度为VA,过载为1.0,突然移动俯仰操纵器件来获得极大的抬头俯仰加速度。在俯仰机动过程中水平尾翼载荷变化很大,非校验机动是平尾、升降舵及后机身的临界载荷情况。
在不考虑控制律非校验机动仿真计算时,升降舵舵面根据座舱纵向操纵输入规律在极短时间内线性增加到限制偏度,而考虑了控制律的非校验机动计算是在极短时间内纵向操纵器件达到最大位移。控制律根据飞机响应状态、纵向操纵器件位移反馈计算得到升降舵舵偏,然后进行飞行运动动力学方程仿真求解,得到整个飞机机动响应时间历程。
采用运动动力学方程,以某型民用飞机原始数据为基础,对是否考虑控制律的非校验机动分别进行了机动仿真计算,得到的飞行姿态及平尾载荷对比曲线如图1~图5 所示:

图1 非校验机动俯仰操纵器件位移对比曲线
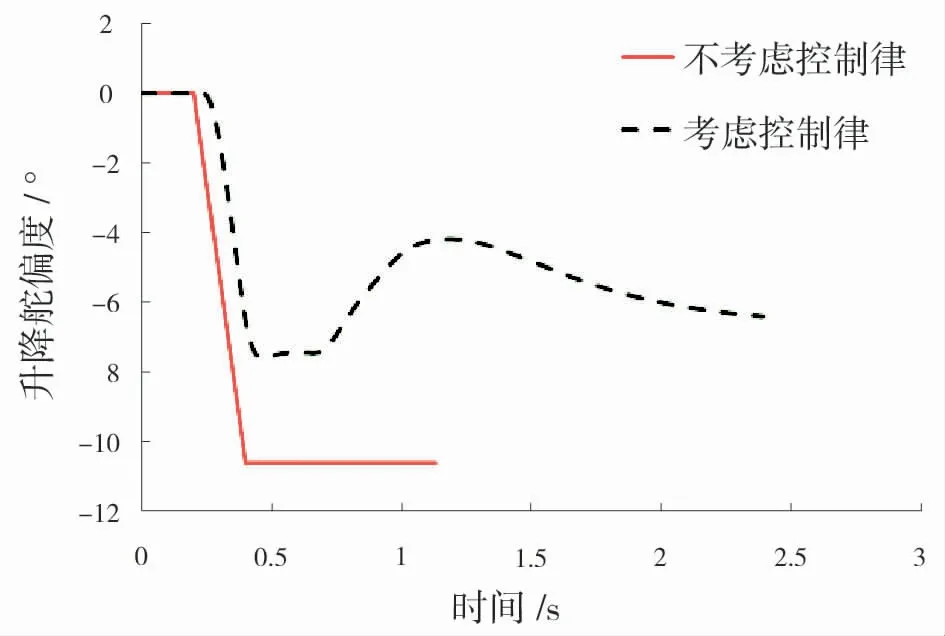
图2 非校验机动升降舵偏角对比曲线
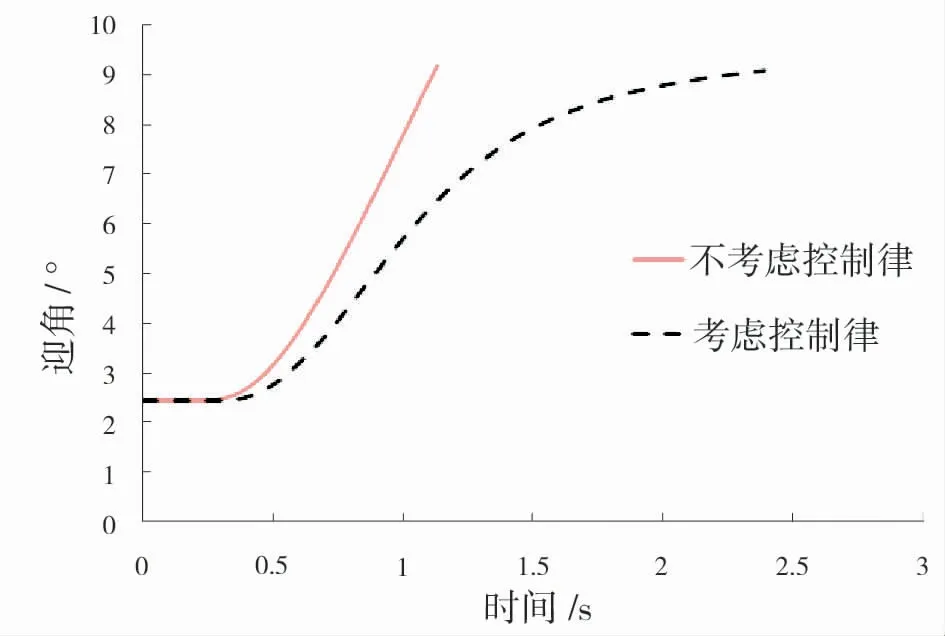
图3 非校验机动迎角对比曲线
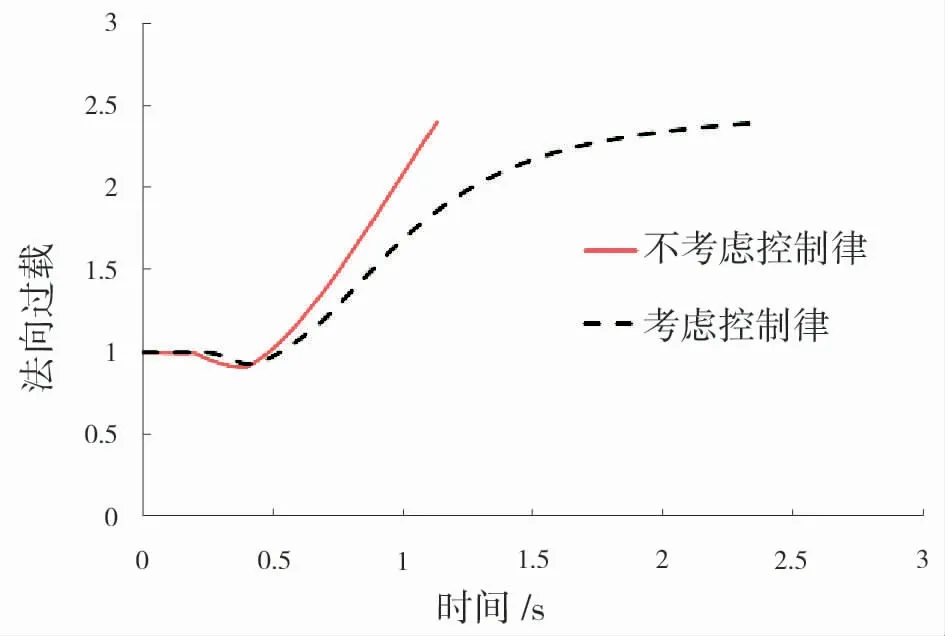
图4 非校验机动过载对比曲线

图5 非校验机动平尾载荷对比曲线
从图1~图5 中可以看出,考虑控制律后,纵向操纵器件位移不再与升降舵偏度一一对应,而是对应法向过载系数,控制律通过比较当前的纵向操纵器件位移法向过载指令和真实的法向过载系数响应后计算得到所需的升降舵偏度。在纵向操纵器件位移急剧移动到满偏时,由于系统的延迟及控制律反馈的影响,飞机的响应及平尾载荷与不考虑控制律计算的结果相比要缓和得多。
3 控制律对校验机动影响分析
校验机动是CCAR-25 部第25.331(c)(2)条规定的一种俯仰机动情况。与非校验机动区别有三点:1)校验机动初始速度为25.333(b)条中机动包线上A到I中的所有设计空速,包括VA、VC和VD;2)校验机动是指飞机在俯仰运动中,先移动座舱纵向操纵器件使得飞机抬头或低头,然后反向移动纵向操纵器件来校验俯仰机动,机动过程中增加了一个回舵的过程;3)相对于非校验机动规定的急剧移动俯仰操纵器件,校验机动是一种规定的操纵器件移动,移动俯仰操纵器件相对比较缓慢。
此外,国内的CCAR-25 部和欧洲的适航认证规范[2](Certification Specification and Acceptable Means of Compliance for Large Aeroplanes 25,简称CS-25)对于校验机动有着不同的要求。CCAR25.331(c)(2)规定校验机动在达到规定的过载系数的同时,飞机的正负俯仰角加速度也必须达到一定的要求,对纵向操纵器件的输入没有具体规定[9]。而根据CS25.331(c)(2)条款的要求,规定了座舱纵向操纵器件的输入形态(正弦)和过载系数要求,而对俯仰角加速度没有要求[2],典型输入形态如图6所示。

图6 CS25.331(c)(2)条款规定的校验机动座舱纵向操纵曲线
经过调查发现,CCAR25.331(c)(2)规定的俯仰角加速要求更加适用于一些较小的、机动性能较好的飞机,这类飞机比较容易达到规范规定的角加速度和过载要求;但对于一些较大的、不追求机动能力的飞机(如大型民用客机)而言,有些情况下难以达到规范规定的角加速度和过载要求[10]。因此,针对大型民用飞机,目前国内外的趋势都是采用欧洲的CS25.331(c)(2)条款作为校验机动的设计依据。
与非校验机动类似,结合运动动力学方程,依据CS25.331(c)(2)条款对校验机动规定的要求,以某型民用飞机原始数据为基础,对是否考虑控制律的校验机动分别进行了机动仿真计算,得到的飞行响应及平尾载荷对比曲线如图7~图11 所示:

图7 校验机动俯仰操纵器件位移对比曲线

图8 校验机动升降舵偏度对比曲线

图9 校验机动迎角对比曲线

图10 校验机动过载对比曲线

图11 校验机动平尾载荷对比曲线
从上图中可以看出,检验机动与非校验机动区别在于:校验机动移动俯仰操纵器件相对比较缓慢且机动过程中增加了一个回舵的过程。由于俯仰操纵器件移动相对比较缓慢,控制律为满足飞行品质的要求及CS25.331(c)(2)条款规定的正限制过载系数要求,考虑控制律后升降舵舵面偏转速率有所增加;其次由于控制律设计中有舵面超调的现象,导致最大升降舵舵偏偏度也有所增加,最后导致飞机响应及平尾载荷有所增加。
4 结论
1)考虑控制律后,飞机舵面偏度变化较大,进而导致整个机动过程中飞机响应以及最后的机动载荷变化较大;
2)对于急剧移动操作器件的非校验机动,考虑控制律后飞机的响应有所缓减,最后导致机动载荷有所降低;
3)对于相对缓慢移动操作器件的校验机动,考虑控制律后飞机的响应更为剧烈,最后导致机动载荷有所增加。
