自动化集装箱码头自动导引车导航定位及控制原理
2020-12-21唐立辉殷健
唐立辉 殷健
自动导引车(automatic guided vehicle,AGV)具备无人驾驶、自动导航、精准定位、安全避障等智能化功能,目前已逐步替代传统集卡,成为自动化集装箱码头普遍采用的水平运输设备。本文介绍AGV导航定位技术应用现状,并结合AGV在自动化集装箱码头的实际应用情况,阐述基于航位推算和绝对位置校正的AGV导航定位及控制原理。
1 AGV导航定位技术应用现状
AGV导航定位主要采用直接坐标导航、电磁导航、磁带导航、光学导航、激光导航、全球定位系统导航等技术。
(1)直接坐标导航 直接坐标导航的实现原理如下:用定位块将AGV行驶区域按坐标划分成若干小区域,并通过对小区域计数实现AGV导引。直接坐标导航的区域划分方式分为光电式和电磁式:前者以不同颜色划分小区域,并通过光电器件计数;后者以金属块或磁块划分小区域,并通过电磁感应器件计数。直接坐标导航的优点是:支持路径修改;导引可靠性较高;对环境无特殊要求。直接坐标导航的缺点是:地面测量安装工程复杂;导引和定位精度较低,无法满足复杂路径的导引要求。
(2)电磁导航 电磁导航的实现原理如下:沿AGV行驶路径在地下埋设金属线,并在金属线上加载导引频率,通过识别导引频率实现AGV导引。电磁导航的优点是:引线较为隐蔽,不易遭受污染和破损;导引原理简单、可靠,便于控制和通信;不受声光干扰;制造成本较低。电磁导航的缺点是:难以实现路径更改和扩展,应用于复杂路径导引时存在较大的局限性。
(3)磁带导航 磁带导航的实现原理如下:沿AGV行驶路径在地面粘贴磁带,通过磁感应信号实现AGV导引。磁带导航的优点是:灵活性较強,易于改变或扩展路径;磁带铺设简单易行。磁带导航的缺点是:容易受环路周围金属物质干扰;对磁带机械损伤极为敏感;导引可靠性较低。
(4)光学导航 光学导航的实现原理如下:沿AGV行驶路径在地面涂漆或粘贴色带,通过对摄像机采集的色带图像信号进行简单处理实现AGV导引。光学导航的优点是:灵活性较好;地面路线设置简单易行。光学导航的缺点是:对色带污染和机械磨损十分敏感,对环境要求较高;导引可靠性较低,难以实现精确定位。
(5)激光导航 激光导航的实现原理如下:在AGV行驶路径周围的精确位置设置激光反射板,由安装在AGV上的激光雷达向激光反射板发射激光束,通过采集和分析激光反射板反射的激光束确定当前AGV的位置和方向,并通过连续的三角几何运算实现AGV导引。激光导航最突出的优点是:无须在地面设置其他定位设施就能实现精确定位,并能实现灵活多变的行驶路径,适用于多种现场环境。
(6)全球定位系统导航 全球定位系统导航通过卫星跟踪非固定路面系统中的控制对象,并实现对控制对象制导,通常应用于室外远距离场景。目前此项技术还在不断发展和完善中,其精度取决于卫星的数量和精度以及控制对象所处的环境等。
2 自动化集装箱码头AGV导航定位及控制原理
2.1 AGV导航定位
自动化集装箱码头AGV采用基于航位推算和绝对位置校正的导航定位技术,涉及的硬件包括无线射频识别天线、定位磁钉、惯性测量单元(陀螺仪)和编码器等。
(1)航位推算 航位推算即在已知AGV初始位置的情况下,由安装在AGV上的陀螺仪、转速编码器和转角编码器采集AGV车轮转速和转向角度等数据,并据此推算AGV的当前位置和运动状态。航位推算能够快速推算AGV位置,并且推算出的位置在短时间内具有较高精度;但由于航位推算基于速度积分求解AGV位置,其累积误差与时间成正比,即从AGV离开初始位置开始,经过的时间越长,航位推算的累积误差越大,最终导致AGV偏离预定轨迹。为了消除航位推算的累积误差,需要设置绝对位置参考点,对AGV实施绝对位置校正。
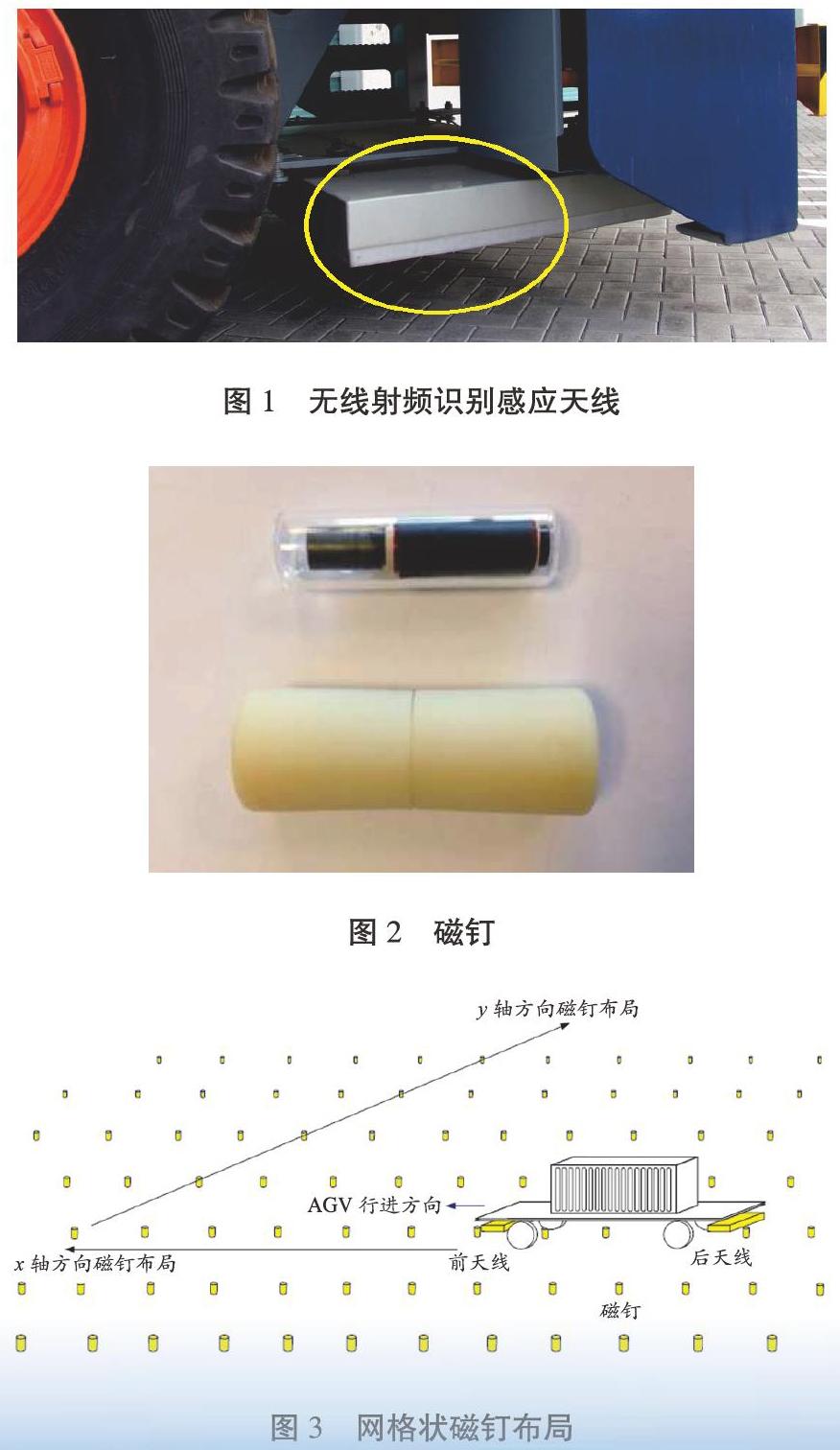
(2)绝对位置校正 AGV绝对位置校正通过无线射频识别感应天线(见图1)和磁钉(见图2)实现,其中:无线射频识别感应天线安装在AGV车身前后位置,呈对称布置;磁钉为无源元件,埋设在地下,呈有规律的网格状布局(见图3),并且每个磁钉相对于堆场坐标系原点的位置均通过全站仪精确测量。当AGV经过磁钉时,无线射频识别感应天线读取该磁钉的编号及其在天线坐标系中的绝对位置,并通过坐标转换得出AGV在堆场坐标系中的绝对位置,从而消除航位推算产生的累积误差。
2.2 AGV导航控制
AGV导航控制基于阿克曼转向原理[1]实现。由AGV规格参数可知AGV的轴距、轮距和车轮半径,并由转角编码器和转速编码器分别采集各个车轮的转向角和角速率。根据阿克曼转向原理,建立AGV运动学模型,计算得出前后轴中心的合成转向角和合成角速率,进而求得各个车轮的转弯半径以及前后轴中心的合成转弯半径和合成速率。基于陀螺仪等惯性测量单元采集的实时数据,计算得到AGV中心的实时三轴线性加速度和角速度,结合AGV的当前位置和姿态及其偏离预定轨迹的状态,采用前馈控制和比例积分微分控制算法控制AGV车轮转速和转向角度等参数,实现AGV自动导航控制。
3 结束语
基于航位推算和绝对位置校正的导航定位和控制技术具有定位精确、安全可靠、维护方便等优点,能够适应自动化集装箱码头作业路径复杂、设备同时作业等工况,已广泛应用于自动化集装箱码头水平运输系统。
参考文献:
[1] 曾锦锋,陈晨,杨蒙爱. 基于阿克曼转向原理的四轮转向机构设计[J]. 轻工机械,2013,31(3):13-16.
(编辑:张敏 收稿日期:2020-06-18)
