变刚度轴承-碰摩转子机动飞行动力学响应
2020-12-21李小彭陈仁桢尚东阳陈延炜
李小彭, 陈仁桢, 尚东阳, 陈延炜
(东北大学 机械工程与自动化学院, 沈阳 110819)
机动飞行指飞机飞行状态随时间改变的飞行动作,是对航空发动机性能评价的重要指标[1]. 机动飞行状态会将附加的激励力即机动载荷引入到航空发动机转子系统中,并改变转子系统的非线性动力学状态. 在某些参数下,可能造成系统的严重失稳,对航空发动机的安全运行造成严重威胁. 此外,系统实际工作过程中,轴承的刚度特性是受转子运动状态影响而不断改变的,同时转子运动状态也会受轴承刚度变化的影响而发生变化. 含碰摩故障的航空发动机在机动飞行状态下高转速运行时尤其如此,碰摩故障、轴承与转子系统相互耦合,使系统表现出强烈的非线性行为.
一直以来,高速滚动轴承-转子系统的研究都是学者们关注的热点. Harsha等[2]建立了考虑轴承径向间隙及滚道表面波纹度等因素的深沟球轴承-高速转子分析模型. Liew等[3]基于Hertz理论对齿轮系统中滚动轴承刚度的时变特征进行了分析计算. Petersen等[4]提出了一个考虑变载荷和时变刚度的滚动轴承模型,并对轴承含缺陷时的刚度变化进行了计算和分析. 曹宏瑞等[5]建立了考虑离心力、陀螺力矩、轴承内圈离心膨胀和热变形的高速滚动轴承模型,并计算了轴承的时变刚度. Cao等[6]提出了一种新的基于刚性元件的滚动轴承-转子系统动态建模方法并进行了实验验证. Wu等[7]利用力与变形的关系建立了圆锥滚子轴承弯曲刚度的计算模型,并采用传递矩阵法研究了轴承变形对转子系统的影响.
Batailly等[8]利用模态坐标转换法将离散后的高自由度方程简化为低自由度的方程,基于拉格朗日乘子法研究了叶片和机匣间的碰摩问题. Groll等[9]提出了一种数值方法,求解了碰摩转子系统周期解及其稳定性,基于谐波平衡的思想,分析了系统的分岔行为. 陈果等[10]建立了考虑叶片数和动态转静间隙的碰摩模型,并对模型的碰摩特性进行了研究. Ma等[11]分析了碰摩与裂纹故障耦合动力学及碰摩与油膜失稳故障耦合动力学.
杨永锋等[12-13]研究了机动飞行作用下的考虑裂纹因素的刚性支撑转子系统的非线性动力学响应. 但对机动飞行的研究所建立的模型为简单平面运动,对于空间复杂飞行运动没有给出机动载荷的推导. 祝长生等[14-15]利用拉格朗日方程建立了飞机在做任意机动飞行时多盘转子系统运动微分方程,用数值方法研究了飞机在水平盘旋、俯冲拉起和横滚机动飞行对转子系统的动力学影响. 但是仅考虑了线性支承,忽略了大量非线性因素对系统的影响. Hou等[16-17]建立了滚动轴承支承下的转子系统在机动飞行条件下的动力学微分方程,并且考虑了碰摩及裂纹等故障,利用数值法研究了机动载荷对系统的非线性动力学影响.
为建立更符合实际工况的轴承-转子系统模型,考虑滚动轴承时变刚度与转子非线性动力学特性之间的相互影响,本文建立了爬升-俯冲机动飞行状态下含滚动轴承时变刚度的轴承-碰摩转子系统模型,讨论了轴承刚度的时变规律与转子动态特性间的相互关系,研究了机动载荷对系统非线性动力学特性的影响,并分析了含碰摩刚度的变刚度轴承-转子系统非线性动力学特性.
1 系统模型
1.1 机动飞行状态下轴承-转子系统模型
图1为变刚度轴承-碰摩转子系统有限元模型结构图. 模型考虑了节点位移对轴承支承刚度kb1与kb2的动态影响,同时考虑在节点5处发生单点碰摩. 此外,模型考虑转子偏心及滚动轴承径向间隙的影响.

节点1、6—高速滚动轴承;节点2、5—集中质量圆盘;m1、m2—转盘1、2的集中质量;mb1、mb2—左、右支撑轴承的集中质量;e1、e2—转盘1和2的偏心距;Jdi、Jpi(i=1,2)—转盘1和2的直径转动惯量和极转动惯量;kb1、kb2—左、右支撑轴承的刚度;cb1、cb2—左、右轴承外圈与轴承座的连接阻尼,Kr—碰摩刚度;μr—摩擦因数
图1 转子-滚动轴承系统模型
Fig. 1 Rotor-bearing system model
根据Lagrange方程,对转子系统单元轴段的动力学微分方程进行推导:
(1)
(2)
(3)
(4)

式(1)~(4)中,方程右端包括转子不平衡力和机动飞行所引起的附加刚度、阻尼和激励力效应,机动飞行效应写成矩阵形式为
FF=FF1+FF2+FF3=
式中:FF1为附加刚度效应,FF2为附加阻尼效应,FF3为附加惯性力及附加惯性力矩. 通常情况下,附加刚度效应远小于系统固有的刚度,附加阻尼效应与飞机横滚运动有直接关系.
设F1为飞机做水平盘旋运动时对转盘引起的附加激励力,F2为飞机做俯冲-拉起运动时对转盘引起的附加激励力,F3为飞机做横滚运动时对转盘引起的附加激励力,且
由此可得机动飞行对转子系统产生的附加激励力. 方程的推导中并没有将转盘的欧拉角假设成小量. 因此该模型不仅适用于简单飞行状况,还能用于飞机在空间任意飞行状态的研究.
1.2 滚动轴承时变刚度模型
如图2所示,设时间t0=0时转轴轴心与轴承内圈轴心重合于坐标零点,当t1=t0+Δt时,轴承内圈随转轴运动产生位移Δ1=[δx1δy1φx1φy1]T,利用Hertz接触理论和Harris滚动轴承模型,采用文献[18]计算得到的轴承主对角刚度矩阵K,即可得到t1时刻转轴对轴承的作用力F=Δ1K,将轴承对转子的支反力-F=[-Fx1-Fy1-Mx1-My1]T引入系统整体有限元模型,即可计算当t2=t1+Δt时的转轴位置Δ2=[δx2δy2φx2φy2]T,以此类推即可得到轴承刚度随转子运动产生的时变规律及转子受轴承时变刚度影响所产生的非线性动力学行为.
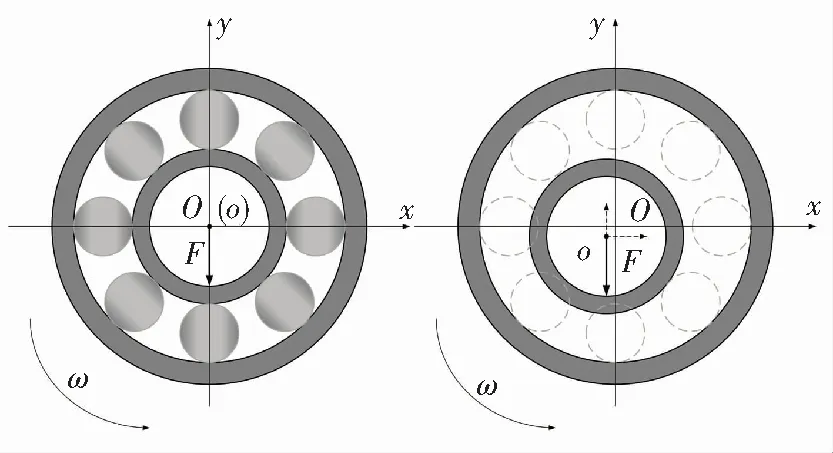
图2 滚动轴承时变刚度模型
1.3 有限元建模及求解
采用Rayleigh梁进行有限元建模,得动力学微分方程为
式中:Fp为单点碰摩力矩阵,采用文献[10]的新型碰摩模型计算获得,另有不平衡力矩阵Fe、重力矩阵G及轴承力矩阵Fb为
本文仅考虑系统在竖直平面内迅速爬升-俯冲的飞行状态,故引入爬升-俯冲机动载荷矩阵
(8)
式中:v为航行速度,ωx为俯仰角速度.
使用Newmark-β法对系统动力学方程进行求解,计算过程如图3所示.

图3 系统动力学方程求解流程图
轴承选用7204C角接触球轴承. 转轴弹性模量E=209 GPa,泊松比μ=0.3,材料密度ρ=7 850 kg/m3,转子结构参数见表1.
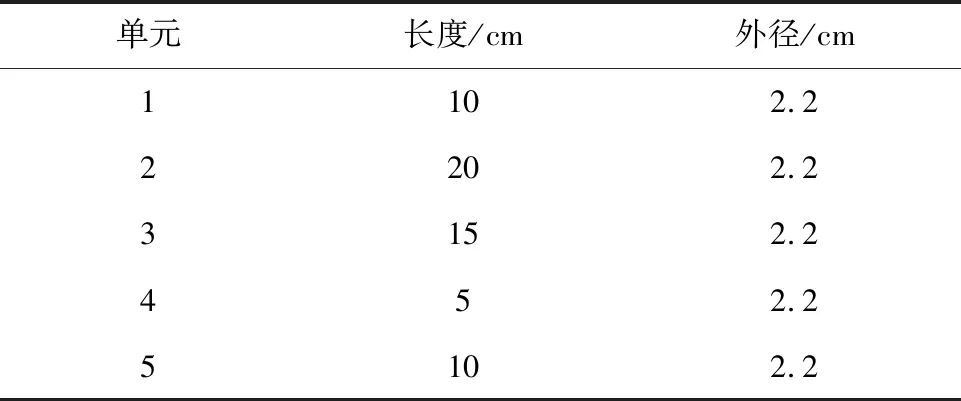
表1 转子结构参数
2 系统动力学特性分析
2.1 轴承时变刚度对系统的影响
图4给出了不同转速下轴承径向刚度时变规律图及系统轴心轨迹图. 不考虑机动载荷及碰摩故障的影响,图4(a)、(b)、(c)分别表示系统处于拟周期运动、单周期运动、混沌运动状态时轴承刚度的时变规律. 可见,当系统处于单周期运动状态时,轴承刚度的波动范围较小,且随着工作时间的推移刚度趋于稳定,此时轴承刚度可近似为定值;当系统处于拟周期运动状态时,轴承刚度呈周期性变化,刚度变化范围较单周期运动时有所增大;当系统进入混沌状态后,轴承刚度的变化也失去周期性,刚度波动幅度进一步增大.
图5~7为定刚度轴承-转子系统和周期时变刚度轴承-转子系统的分岔图. 其中图5未考虑机动载荷及碰摩故障的影响,图6中仅引入机动载荷G=4,图7中仅考虑碰摩刚度Kr=3×106N/m. 对比图5与图8(a)、图6与图8(b)、图7与图9可见,考虑轴承时变刚度的转子系统模型在各个参数影响下均表现出更丰富的非线性动力学状态. 图9中三维频谱图横坐标频率比(Frequency ratio)代表系统共振频率与主频率比值.
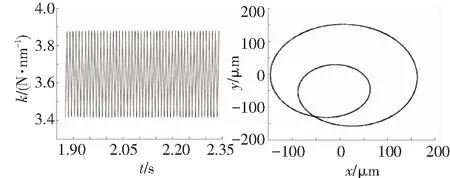
(a) ω=13 400 r/min

(b) ω=14 000 r/min

(c) ω=20 600 r/min

(a)定刚度 (b)周期变刚度
(a)定刚度 (b)周期变刚度

(a)定刚度 (b)周期变刚度
Fig.7 System response under different bearing stiffness forKr=3×106N/m
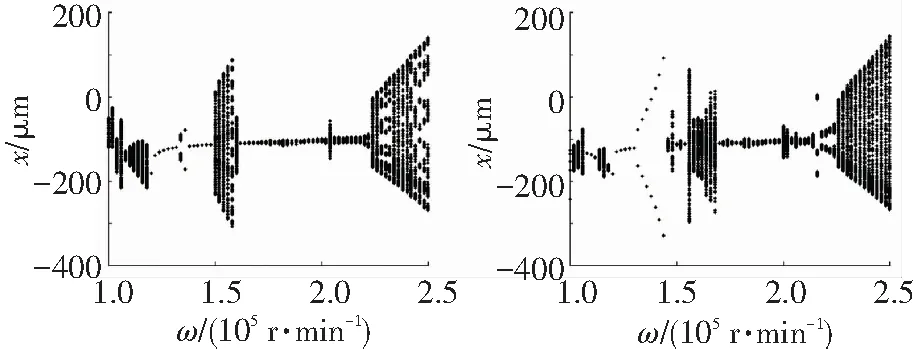
(a)G=0 (b)G=4
Fig.8 Bifurcation diagram of bearing-rotor system with variable stiffness

图9 Kr=3×106 N/m时系统响应
在转速低于15 000 r/min及高于22 600 r/min区间,系统产生大量倍周期分岔现象,且整体倍周期分岔点向低转速方向平移. 轴承时变刚度对转子系统在低转速区间的影响不仅适用于航空发动机,也适用于离心机及压缩机等工业机械,而其对高转速区间的影响也是提高转子系统最高转速的限制条件之一.
综上可见,以往将系统中轴承刚度视为定值或周期变化值所建立的模型并不能准确表述系统所有的运动状态,有必要建立轴承刚度随转子瞬时运动状态改变而改变的系统模型.
2.2 机动载荷对变刚度轴承-转子系统的影响
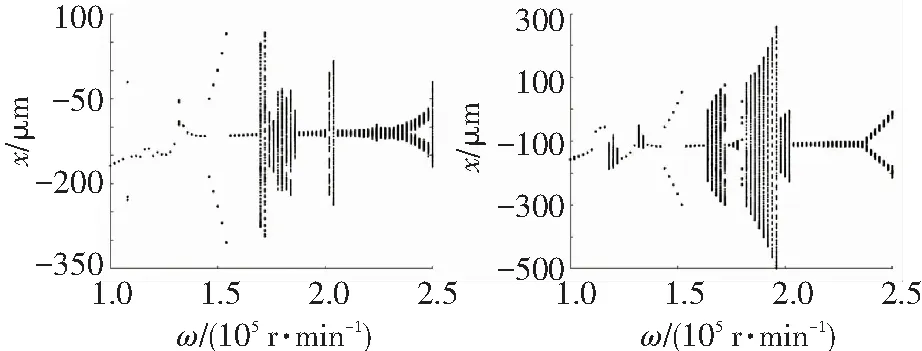
不考虑碰摩故障的影响,设G=ωxv/g为俯仰机动载荷. 图8所示分别为不含机动载荷(G=0)和含机动载荷(G=4)时系统的整体分岔图. 可见,当转速位于ω=10 000~12 000r/min时,系统稳定性提高,更多转速区间表现为单周期运动;当转速为ω=12 000~15 000 r/min时,系统分岔点提前,且含机动载荷时系统的倍周期运动区间更大,转子轴心轨迹轴向位移增大;当转速为ω=15 000~ 25 000 r/min时,系统分岔增加,稳定区间减小. 可见,引入机动载荷的影响后,系统动态特性产生了较为显著的变化.
图10为ω=16 000 r/min,机动载荷G=2时系统的轴心轨迹及庞加莱截面图. 结合图8可知,在机动载荷G=0和G=4时,系统表现为单周期运动或拟周期运动;当G=2时系统表现为混沌运动,可见在该转速区间特定机动载荷会对系统产生较大的影响.

(a)轴心轨迹 (b)庞加莱截面
综上可见,在低转速下,机动载荷能在一定程度上提高系统的稳定性,因为在低转速下机动载荷的对系统施加的竖直方向上的离心力抑制了轴承非线性力对系统的影响. 在中高转速区间特定机动载荷会导致系统进入混沌状态,应尽量避免. 在超高转速区间,变刚度轴承的非线性力对系统的影响占据主导地位,机动载荷的影响相对减小. 其中,将ω=10 000~14 000 r/min视为相对低转速区间,将ω=14 000~18 000 r/min视为中转速区间,将ω=18 000~22 000 r/min视为高转速区间,将ω=22 000~25 000 r/min视为超高转速区间.
2.3 机动飞行下碰磨转子系统动力学分析
考虑节点5处发生单点碰摩,图9、11、12分别为不同碰摩刚度下系统全局分岔图和三维频谱图. 由分岔图可见,当转速低于12 400 r/min时,系统运动状态受碰摩刚度影响较小; 当转速高于12 400 r/min时,随着碰摩刚度的提高,系统的动力学特性变得愈加的复杂,分岔及混沌区间增加,系统稳定运动区间减小.
由频谱图可见,当转速低于12 400 r/min时,系统产生超谐共振,频率成分主要包含ω、1.14ω及1.29ω;当转速高于12 400 r/min后,频率成分以亚谐共振为主,包括0.14ω、0.43ω、0.5ω及0.71ω等,且随碰摩刚度增大频率成分增多,振幅增大.
设碰摩刚度Kr=3×106N/m,图13为不同机动载荷下转子系统全局分岔. 对比图9可见,当系统存在碰摩故障时,随着机动载荷提高,系统稳定区间减少,倍周期运动区间增加,且在多个转速区间表现出更加复杂的分岔现象. 由此可知,机动载荷的提高一定程度上等效于增大了系统的碰磨量.

图11 Kr=1×106 N/m时系统响应

图12 Kr=5×106 N/m时系统响应
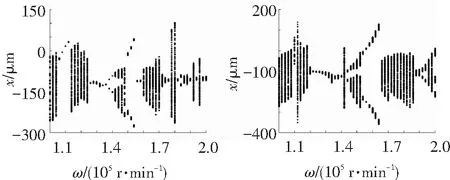
(a)G=2 (b)G=4
Fig.13 Response of the system under different maneuvering loads forKr=3×106N/m
3 结 论
1)轴承时变刚度不仅对处于正常工作转速区间的转子系统动力学状态存在影响,也是限制转子系统最高转速的因素之一. 为准确描述轴承、转子非线性动力学间的相互影响,有必要建立轴承刚度随转子瞬时运动状态改变而改变的系统模型.
2)在机动载荷的作用下,系统产生的更加复杂的非线性现象. 随着机动载荷的增加,系统整体稳定运动区间减少. 在低转速区间,提高机动载荷能一定程度上提高系统稳定性,且在中高转速下特定机动载荷能导致系统产生强烈的非线性现象,在超高转速区间轴承非线性力的作用超过机动载荷对系统的影响.
3)碰摩故障会对机动飞行状态下的转子系统产生明显的影响. 随着碰摩刚度的提高,系统的分岔和混沌运动区间增加,系统运动稳定性降低,且碰摩故障对系统稳定性的影响随转速的提高而增大. 系统频率成分以亚谐共振为主,当碰摩故障达到一定程度时会导致系统损毁失效. 提高机动载荷一定程度上等效于增大了系统的碰磨量.
