汽车自动泊车辅助系统关键技术研究
2020-12-21尤祖旺
尤祖旺
(同致电子科技(厦门)有限公司,福建 厦门 361006)
0 引言
近年来,汽车在城市逐渐普及,给人们生活带来便利的同时,也加大了车辆停车入位难度。我国一些城市停车位拥挤,如果停车位之间的空隙不够标准,就会导致其他车辆无法停车,或者自身车辆无法进入[2-3]。因此,自动泊车辅助系统成了当前重点研究内容,为不熟悉倒车停车入位的新手提供了便利。
该文通过安装在车辆四周的12 个超声波雷达扫描周围障碍物,4 个摄像头对静动态物体、行人及停车线进行识别,采用高清摄像头和超声波雷达2 种传感器融合的技术可以获得停车位的长度、深度和停车线信息,而且可以依据车辆的行车信息和车辆周围有无障碍物的情况,通过自适应算法对最佳泊车轨迹进行计算,采用单片机控制技术和CAN 通信,控制车辆的转角、档位、制动以及油门,实现全自动泊车。
1 系统框架结构设计
自动泊车辅助系统主要由中央控制单元模块、超声波雷达模块、摄像头模块、动力执行模块(转向系统、制动系统以及动力系统)以及人机交互模块等组成。
图1 为系统框架结构设计方案。
信息检测模块可以说是自动泊车的眼睛,运用超声波雷达和高清摄像头,可以对周边的路面状况和其他车辆的位置进行识别,将收集到的图像数据,周围物体与车身的距离传输到中央控制单元。
超声波雷达共有12 路,包括前后共8 个UPA,左右侧共4 个APA。超声波雷达可以识别泊车时的障碍物信息,将障碍物信息传输给中央处理单元。高清摄像头共有4 路,车辆的前、后、左、右侧各有1 路,能够识别车位线信息。图2 为超声波雷达和摄像头的布置图。

图1 系统框架结构设计方案

图2 超声波雷达和高清摄像头布置图
中央控制单元模块是自动泊车系统的核心,将信息检测模块上传的数据进行处理和分析,得出汽车当前的位置、目标的位置以及周边的环境,依据这些参数规划好路径,并将指令输出到执行单元。
动力执行模块接收到中央控制单元模块的指令,控制车辆的方向盘、油门以及制动等,使汽车能按照规划好的路径运动,并随时准备接收中断时的紧急停车[1]。
2 系统硬件设计
按照系统总体设计方案,该文以超声波雷达传感器、高清摄像头、中央控制单元模块为核心,介绍系统硬件设计方案。
2.1 超声波雷达传感器。
超声波雷达传感器的工作原理是控制器通过功率驱动可以发射出超声波,单片机同步计时。发射一定频率的超声波如果碰触障碍物会形成反射波,部分反射波返回作用在超声波传感器上,通过转换超声波传感器的声/电,形成微弱的电信号,将微弱的电信号放大、整形,可以向单片机发出中断申请。单片机收到中断申请的信号后,会立即中断,执行外部中断服务程序,停止计时,得出超声波发送和返回的时间T,计算出发射点与障碍物的距离S,即:

式中:C 是超声波在空气中的传播速度。
该系统超声波雷达分为2 种。1)在汽车前后保险杠上安装的用来测量计算汽车前后障碍物的倒车雷达,探测距离一般在15 cm~250 cm,我们将该雷达称为UPA。2)在汽车侧面安装的用来测量计算汽车侧方与障碍物距离和空间的超声波雷达,探测距离一般在30 cm~ 500 cm,该雷达称为APA。APA 的探测距离较远,它不仅能够检测左右侧的障碍物,而且还能根据超声波雷达返回的数据判断障碍物及空间的大小。
2.2 高清摄像头
汽车泊车的关键在于障碍物的避让和车位线的识别,该系统利用高清摄像头采集图像,通过控制器端的处理器进行计算,识别出车位线信息。
图3 为高清摄像头设计框图。图像传感器采集周围的图像信息,经过图像处理后,输出并行视频信号,经过转串器将并行的视频信号转为串行的视频信号,再经过同轴电缆传输到控制器端的解串器,解串器将串行的视频信号转成并行的视频信号,提供给后端SOC 处理器。
同轴电缆同时也可以进行电源和IIC 控制信号的传输,能够最大限度节省线材成本。
泊车过程中,SOC 核心处理器将采集到的4 路高清图像信号进行计算处理,识别车辆周围有车位线的车位,与超声波雷达传感器的障碍物信息相结合,判断泊车位的大小和形状,能够实现更多场景下的高精度全自动泊车控制[4]。
2.3 中央控制单元模块
图4 是中央控制单元模块,主要包括TDAx SoC 核心处理器、单片机MCU、电源管理模块,SBC 模块,解串器与转串器等组成。
TDAx 是高级驾驶辅助系统ADAS 的汽车处理器解决方案,具有较高成熟度和市场应用,TDA SOC 核心处理器适用在国内车厂高端车型的泊车辅助系统,它以全景为基础的具备复杂图像分析功能平台,集成障碍物检测、车位检测以及超声波雷达等,可用于开发集成车位识别的功能。TDAx 提供大量的图像分析库以及深度学习的开发包,可以做识别类的视觉应用算法开发。该文正是利用这种强大的核心处理器进行4 路摄像头视频,图像和图形处理,利用集成算法,识别泊车过程中的车位线。
SBC 模块能够实现CAN 收发器,电源管理、休眠和唤醒功能。为实现车身各电器部件的互联,目前普遍采用CAN 协议进行通信传输。通过SBC 模块的CAN 收发器,系统在泊车过程中,结合障碍物和车位等信息,能够接收和控制车身状态信息,如转角信号、车速、档位信息等,保证车辆按照规划的行车轨迹正确泊车[5]。
3 系统自动泊车控制程序设计
根据系统总体框架结构设计及硬件电路布设方案,该文对系统软件程序开发进行分析,设计自动泊车控制程序开发流程。当系统接收到自动泊车操控命令时,根据传感器采集到的汽车周围环境信息,为该汽车寻找周围停车位,并根据汽车当前所处位置,判断自动泊车行驶路线,即泊车路线定位[6]。因此,自动泊车程序的开发关键在于利用传感器搜索周围环境信息,找到停车位,另外一个关键点在于确定自动泊车行驶路线。如图5 所示为停车位查询流程,图6 为自动泊车控制流程。
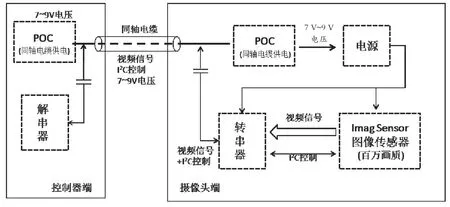
图3 高清摄像头设计框图

图4 中央控制单元设计方案
图5中,系统完成初始化处理以后,开启各个传感器采集汽车周围环境信息,搜索周围是否有停车位。每次搜索到一个车位,显示相应停车位图示,以提醒驾驶员选择确定停车位。图6 中,根据确定的停车位置信息,下达自动泊车命令,待汽车进入停车位后,停止操控。

图5 停车位查询流程

图6 自动泊车控制流程
停车位搜寻是根据采集到的信息进行定位,通过数据整理分析,判断是否有满足条件的停车位及位置,并显示在人机交互系统的显示屏上。当选定泊车位进入自动泊车准备时,系统将自动计算泊车轨迹,并确认是否满足泊车条件(车辆静止、车门关闭、驾驶员安全带系上等),当满足泊车条件时,驾驶员双手离开方向盘、油门踏板释放、刹车踏板释放后,系统下发指令控制车辆的方向、档位、油门及制动,按照计算的泊车轨迹,自动停入选定的车位。
4 系统测试分析
该文利用试验车进行模拟测试实验,在测试场地分别设置2 个泊车位P1 和泊车位P2,其中,P1 是正常可泊车位,而P2 内有黄色“X”线,表示不可泊车的车位。同时为检验泊车过程中试验车的避障性能,在P1 和P2 两侧停放2 辆车以及在其周边放置若干个锥桶作为障碍物,构建自动泊车测试场地,如图7 所示。按照系统硬件电路设计方案,在试验车上搭载自动泊车辅助系统,在图7 的位置,测试系统自动泊车操控功能。
该次测试主要对试验车躲避障碍物、搜索停车位、自动泊车且未压到车位线3 项功能进行测试,将测试结果与设计目标进行对比,从而判断系统开发方案是否符合要求。表1为系统测试结果统计表。

表1 系统测试结果统计表
依据表1 中的统计结果可知,系统在自动泊车期间未碰撞障碍物,能够根据周围环境情况为小车找到停车位P1,而P2 被系统识别为无效车位。自动泊车期间,系统正确规划泊车轨迹,并按照预定泊车轨迹泊入设定的可供泊车的停车位P1,且4 个轮胎均在P1 停车位线内,由此判断该系统符合自动泊车可靠性和精准度要求。
特别需要指出,为保证安全,避免意外发生,只要满足以下5 个条件中的任意1 个,系统将退出泊车控制状态,转为人工控制。1)驾驶员踩下刹车或油门踏板。2)驾驶员操作换挡器。3)驾驶员干预方向盘。4)打开任意一个车门。5)松开安全带。

图7 系统测试环境
5 结语
该文围绕汽车泊车问题展开研究,选取TDAX SoC 作为核心处理,搭配TC 233 单片机共同开发了一套全自动泊车控制系统。该系统利用超声波雷达和高清摄像头2 种传感器采集周围环境信息,经SoC 核心处理器计算和单片机控制车辆转向、制动、档位、油门,达到自动泊车入位的目的。测试结果表明,该系统在开启泊车模式测试期间,能够准确避让障碍物,支持车位搜寻及识别,泊车可靠性和精确度较高,符合系统开发要求。
