基于EDEM的履带式果园除草机除草过程仿真分析
2020-12-19何存财熊世磊嵇君霖孙建民万芳新姚亚萍
何存财, 熊世磊, 嵇君霖, 郭 凯, 孙建民, 万芳新, 姚亚萍
(甘肃农业大学机电工程学院,甘肃 兰州 730070)
杂草是果园中普遍存在的有害植物,不仅有较强的营养和水分吸收能力,还可为害虫提供生存场所,导致果树产生病虫害[1-5]。近年来,随着我国人口老龄化问题的不断加剧,果树种植面积不断扩大,劳动力不足的问题也日渐突出,很多地区出现了果园机械化程度不足、机械设备使用不协调、无人管理以至于任由杂草生长的现象,极大影响了我国果业的发展[6-9]。
传统上的除草方式有两种,一种是利用人工除草,劳动强度高,效率低;另一种是利用化学药剂进行化学除草,造成土壤、水体、以及空气污染[10-11]。因此,在节约劳动力成本、减少生态环境污染前提下,设计一款符合我国果园种植行情,提高果园管理效率的除草机已经势在必行[12-15]。因此,课题组在调查研究的基础上设计了一款履带式果园除草机。除草工作装置是果园除草机的核心部件,本文利用EDEM离散元仿真软件对除草工作装置工作过程进行仿真分析,研究不同前进速度、不同工作时刻下的除草状况以及刀片和刀轴的受力情况,确定适宜的前进速度,以期为果园除草作业和除草工作装置结构的改进和优化提供理论依据。
1 履带式果园除草机的整机结构及工作原理
课题组自主研发的履带式果园除草机整体布局如图1所示、整机装配简图如图2所示,该机主要由行走装置、传动装置、液压控制系统、柴油机动力装置、智能控制系统、除草作业装置等六大部分组成。工作时,柴油发动机提供的动力通过传动装置一部分经皮带传送到变速箱,用于驱动整机的行走,另一部分经中间过渡带轮传送到机架后部,用于驱动除草装置进行除草作业。整个作业控制过程可由手动和遥控两种模式实现,其中作业高度可通过液压系统进行控制。
除草工作装置是整个履带式果园除草机的核心部件,主要是由除草刀、除草刀轴、除草装置连接架等部件组成,结构简图如图3所示。除草机工作过程中的除草效果与主要工作部件的受力情况有关,故本文基于离散元法软件EDEM对除草过程进行仿真分析。
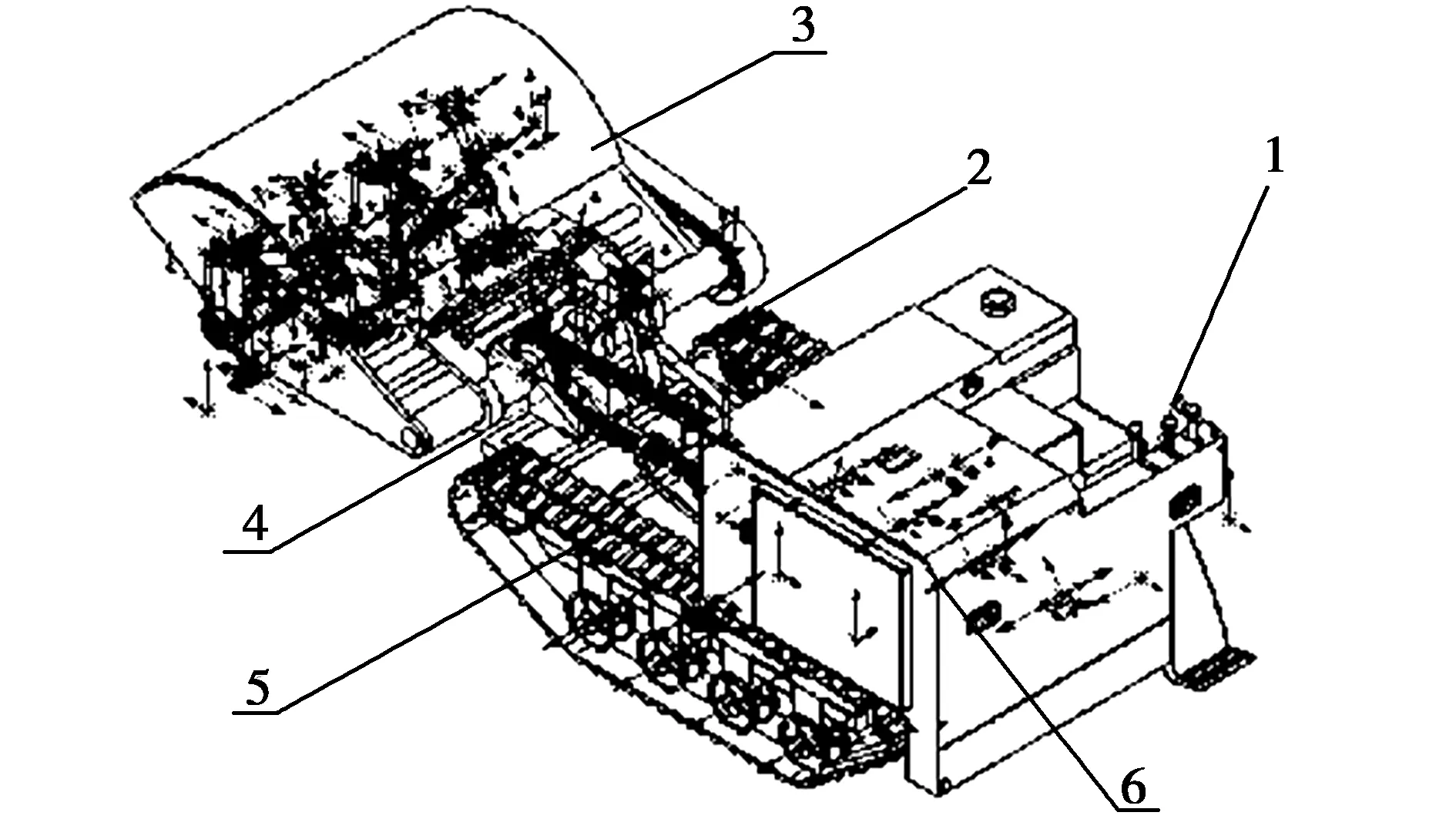
图1 履带式果园除草机整体布局1.智能控制系统;2.液压控制系统;3.除草作业装置;4.传动装置;5.行走装置;6.动力装置

图2 履带式果园除草机整机装配简图1.履带驱动轮;2.操作台;3.驾驶位;4.液压油箱;5.整体升举液压缸;6.纵向深度调节液压缸;7.卡锁控制液压缸;8.除草装置连接架;9.单排链;10.除草刀轴;11.除草刀;12.横向位调节液压缸;13.快速拆装架;14.双排链;15.带传动装置;16.张紧轮;17.支撑架;18.柴油发动机;19.变速箱

图3 除草工作装置结构简图1.双排主动链轮;2.双排链;3.双排从动链轮;4.快速拆装架;5.除草装置连接架;6.横向位调节液压缸;7.除草刀;8.除草刀轴 9.挂接卡锁;10.深度调整液压缸;11.卡锁控制液压缸;12.单排链;13.液压连接杆;14.整体升举液压缸
2 除草过程模拟仿真
2.1 除草过程仿真模型的建立
除草过程仿真模型如图4所示。通过设定一系列参数,确定出草叶模型,待破碎模型开启后,将草叶模型设置成虚拟模型,同时将转轴、刀片和盖板旋转参数设置成204.1 rad/s,直线运动参数设置为0.7 m/s,开始时间设置为4 s。

图4 除草过程仿真模型
2.2 除草工作过程可视化分析
不同前进速度、不同工作时刻下除草、碎草情况在EDEM软件模拟结果如图5、图6所示。从图5和图6可以看出,相同前进速度下,不同工作时刻的除草结果相差较大。前进速度为0.4 m/s情况下,t=1.400 1 s时除草工作装置正在除草,且碎草抛洒程度低于在t=1.8 s时的抛洒程度;前进速度为0.7 m/s情况下,t=1.6 s时除草工作装置正在除草,且碎草抛洒程度低于在t=1.8 s时的抛洒程度。前进速度为0.7 m/s时的碎草抛洒范围显著大于前进速度为0.4 m/s的碎草抛洒范围。因此,为了降低除草工作过程中碎草抛洒程度,履带式果园除草机的前进速度应越低越好。从模拟除草工作过程直观分析可以确定,EDEM软件能够完成履带式果园除草机除草工作过程的模拟仿真。
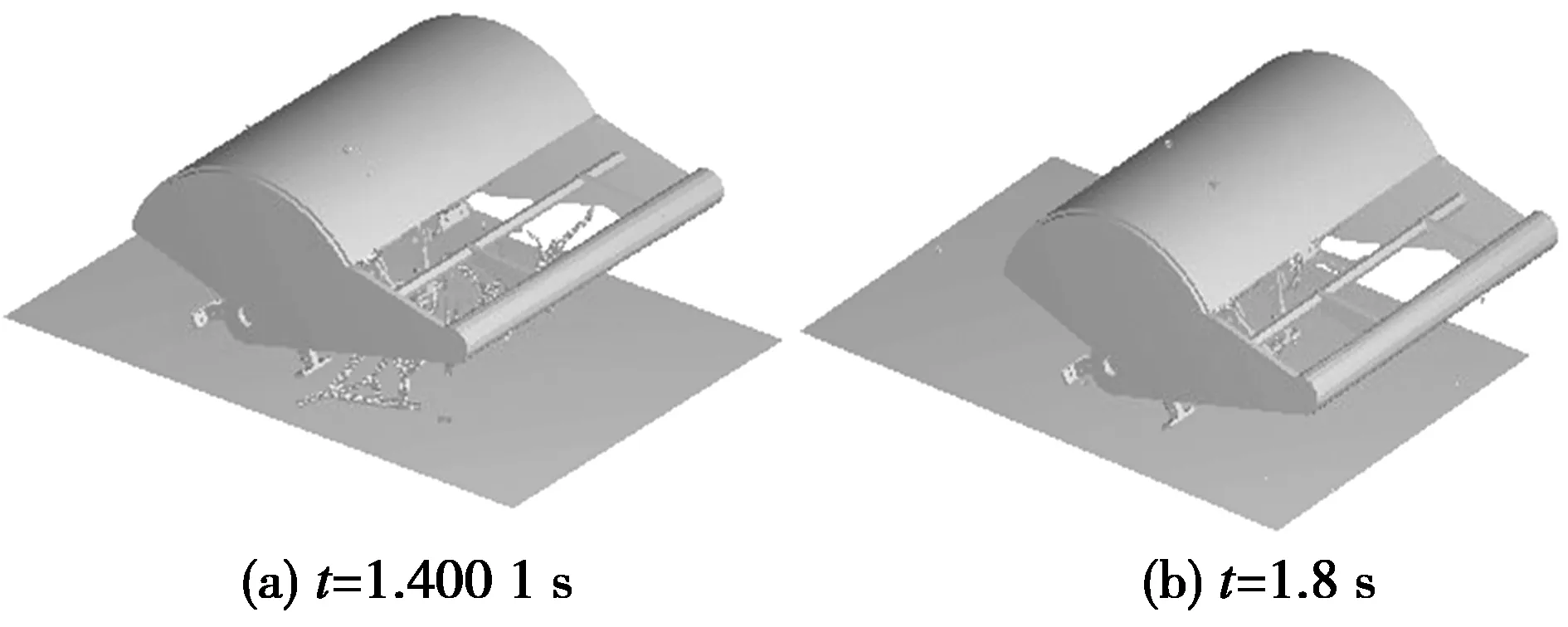
图5 前进速度为0.4 m/s时除草工作过程仿真

图6 前进速度为0.7 m/s时除草工作过程仿真
2.3 除草工作过程杂草形状变化分析
不同前进速度、不同工作时刻下杂草的形状变化在EDEM软件模拟结果如图7、图8所示。从图7和图8可以看出,相同前进速度下,不同工作时刻的杂草形状不同,杂草在机器运动的过程中不断向设备前进的方向倾斜。前进速度为0.7 m/s时的碎草程度明显不如前进速度为0.4 m/s时的碎草程度。因此,为了提高除草、碎草效率,履带式果园除草机的前进速度也应越低越好。
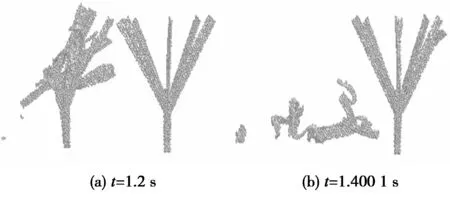
图7 前进速度为0.4 m/s时草的形状变化模拟仿真

图8 前进速度为0.7m/s时草的形状变化模拟仿真
2.4 不同前进速度下刀片受力分析
在转速为1 900 r/min时,不同前进速度下刀片的受力情况在EDEM软件模拟结果如图9、图10所示。从图9和图10可以看出,前进速度为0.4 m/s时,刀片未接触草前,受力基本为零,接触草之后,随着时间的变化,刀片受力变化为先缓慢增加至一定值时,保持不变,随后继续增加至最大,最大受力值为0.162 4 N;前进速度为0.7 m/s,当刀片未接触草前,受力也基本为零,接触草之后,随着时间的变化,刀片受力变化为先缓慢增加,随后降低,然后继续增加,最后降低,其中最大受力值为0.4 N。因此,在转速一定的情况下,前进速度越高,刀片最大受力越大,所以实际除草工作过程中,在满足正常工作要求的前提下,前进速度越低越好。

图9 前进速度为0.4 m/s时刀片受力变化仿真

图10 前进速度为0.7 m/s时刀片受力变化仿真
2.5 不同前进速度下刀轴受力分析
在转速为1 900 r/min时,不同前进速度下刀轴的受力情况在EDEM软件模拟结果如图11、图12所示。从图11和图12可以看出,前进速度为0.4 m/s时,刀片未接触草前,刀轴受力基本为零,接触草之后,随着时间的变化,刀轴受力变化为先缓慢增加,然后降低,随后增加至最大,最大受力值为0.038 5 N;前进速度为0.7 m/s,刀片未接触草前,刀轴受力也基本为零,接触草之后,随着时间的变化,刀轴受力变化为先快速增加至一定值,随后降低,然后继续增加,最后降低,最大受力值为0.096 5 N。因此,在转速一定的情况下,前进速度越高,刀轴最大受力也越大。

图11 前进速度为0.4 m/s时刀轴受力变化仿真

图12 前进速度为0.7 m/s时刀轴受力变化仿真
3 结论
利用EDEM软件对履带式果园除草机除草装置工作过程进行了模拟仿真分析,得出以下结论。
(1)通过对除草工作过程的可视化分析和杂草形状变化分析可知,相同前进速度、不同工作时刻除草效果差异较大,前进速度为0.7 m/s时的碎草抛洒的范围显著大于前进速度为0.4 m/s的碎草抛洒范围,而前进速度为0.7 m/s时的碎草程度则明显低于前进速度为0.4 m/s的碎草程度。
(2)在转速一定的情况下,前进速度越高,刀片和刀轴的最大受力均越大。为了降低除草工作过程中碎草抛洒程度,提高除草、碎草效果,提高工作部件的使用寿命,在满足生产效率的前提下,履带式果园除草机的前进速度越低越好。
