分布式驱动电动汽车转矩分配策略综述
2020-12-15黄亚东郭桂芳
黄亚东 郭桂芳
摘 要:分布式驱动电动汽车的主要结构特征是将驱动电动机直接安装在驱动轮内或驱动轮附近,具有驱动传动链短、传动高效、结构紧凑等突出优点。电机独立驱动的优势使得每个电机能够实现精确控制,为提升分布式驱动电动汽车地盘动力学以及全线控技术提供了巨大优势基础。从电子差速技术和横向稳定性两方面的研究进展进行综述,介绍这两方面技术中所涉及到的驱动电机转矩分配技术和分配的方式,以及控制过程中所使用的算法。并对分布式驱动电动汽车转矩分配策略的研究方向做几点展望。
关键词:分布式驱动电动汽车;电子差速技术;横向稳定性;转矩分配
中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2020)22-230-08
Abstract: The main structural feature of distributed drive electric vehicles is that the drive motor is directly installed in or near the drive wheel, which has the outstanding advantages of short drive transmission chain, high transmission efficiency, and compact structure. The advantages of independent driving of motors enable each motor to achieve precise control, which provides a huge advantage foundation for improving the dynamics of distributed driving electric vehicles and the full line control technology. This paper summarizes the research progress of electronic differential speed and lateral stability, introduces the torque distribution technology and distribution method of the drive motor involved in these two technologies, and the algorithm used in the control process. And some prospects for the research direction of distributed drive electric vehicle torque distribution strategy.
Keywords: Distributed drive electric vehicle; Electronic differential technology; Lateral stability; Torque distribution
CLC NO.: U469.72 Document Code: A Article ID: 1671-7988(2020)22-230-08
前言
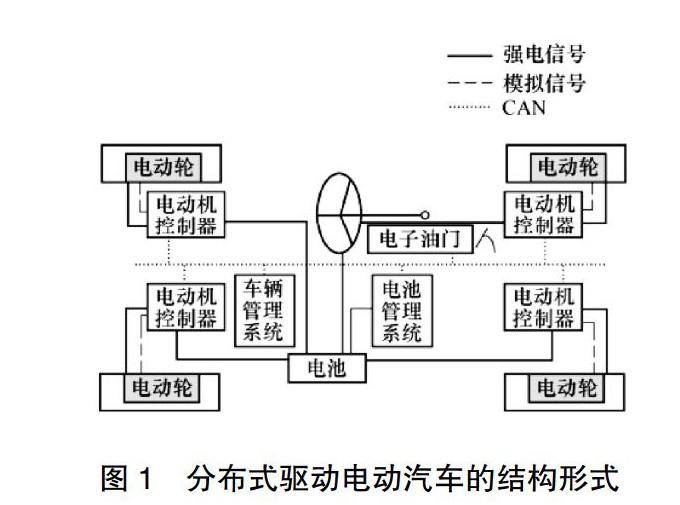
能源危機和环境污染两大问题,使得电动汽车逐渐成为研究热点。电动汽车主要有两种结构,分别由传统的燃油汽车改造或是重新设计而来,类似于传动燃油车结构的电动汽车为单电机集中式驱动的结构,适应于电动汽车的另外一种结构则是多电机分布式驱动的结构。随着对电动汽车的深入研究,分布式驱动电动汽车开始备受关注。如图1所示。分布式驱动电动汽车是将2个及以上的安装在驱动轮内的电机(轮毂电机)或者安装在驱动轮附近的电机(轮边电机)作为驱动源,实现独立驱动的电动汽车。分布式驱动电动汽车具有驱动传动链短、传动效率高、结构紧凑等突出优点,为车辆底盘的智能全线控技术以及动力学控制技术提供了广阔的前景。[1]对分布式驱动电动汽车的电机转矩分配策略进行研究,能充分利用电机独立驱动的优势,对电动汽车电子差速技术的研究和改善车辆的横向稳定性、安全性具有重大意义。
1 分布式驱动电动汽车的优势
与传统的集中式驱动电动汽车相比,分布式驱动电动汽车最大的区别在于其各个驱动轮可以实现单独的驱动和制动。因此,它的优势主要体现在:通过优化控制的方式能够实现电机转矩的最优的驱/制动力分配方式;将机械连接方式转化为电气连接的方式便于实现灵活的车辆底盘布置和实现车辆的一体化控制;多电机的控制使用能够提高车辆在部分驱动电机失效情况下的可靠性。除此之外,还有如下优势:
1)路面附着利用率高:通过轮毂、轮边电机实现多轮独立驱动,路面附着利用率高。
2)模块化与总布置便捷:电驱动系统移至轮内,为整车空间布置创造了有利条件,易实现模块化设计。
3)扭矩矢量控制灵活:通过对每个驱动电机的反馈控制,能够实现精确的驱动防滑、横摆稳定性控制等主动控制功能。[2][3]
2 分布式电动汽车转矩分配技术
相对于集中式驱动电动汽车,分布式驱动电动汽车的4个车轮的转矩均能独立控制,在其能力范围内转矩可按照任意比例分配[4],使得电机工作在高效区来减小能耗,同时实现车辆操纵稳定性和平顺性的改善。
在涉及到转矩分配的问题上,主要包含分布式驱动电动汽车电子差速控制技术和横向稳定性控制两个方面。一般来说,采用轮毂电机驱动是分布式驱动电动汽车的主要驱动形式,它取消了传统燃油车上的机械式差速器,而且驱动转矩由每个车轮独立产生,转矩的失调可能会加剧轮胎磨损或造成车辆横向失稳,因此需要电子差速控制来协调各车轮的转矩,实现传统汽车中机械差速器的功能。因此,通过合理地分配电机转矩,能够有效地实现车辆转弯时的差速控制,是轮毂电机驱动电动汽车研究的重点和难点。
同时,分布式驱动电动汽车在高速转向行驶时也需要协调车轮的转速或转矩,不仅是为了避免轮胎磨损,还要避免侧滑、甩尾、激转等横向失稳事故。鉴于此,分布式电动汽车的独立驱动的特点使得电动汽车在提高稳定性和减小能耗方面具有令人瞩目的潜力。
3 电子差速控制中的转矩分配
3.1 电子差速技术
当车辆转弯行驶时,内轮和外轮有不同的速度以防止不稳定的驱动,传统的车辆能够通过机械差速器实现这个功能。分布式独立驱动电动汽车的驱动电机直接安装在轮辋内或其附近,由于各电动轮之间无机械连接,驱动电机可有效地独立调节控制,故可通过电子差速控制系统使内、外侧电动轮转速满足转向行驶时的差速要求,从而省去结构复杂的机械差速器[5]。对于分布式电动车的差速设计,完全摆脱了目前机械差速器的技术路线和机械设计的束缚,差速功能主要由软件完成,即电子差速控制。[6]
电子差速控制可以根据转弯条件对左右驱动轮输入不同的转矩,从转弯时的控制响应特性看,希望车辆获得更大的加速度或减速度、更大的向心加速度和车体质心偏离角以及更小的瞬时转弯半径;从转弯行驶的操纵性能看,希望差速控制算法能有更多考虑,及时避免可能导致的不安全倾向,使得驾驶更安全平稳;此外,轮式驱动电动车由于免去了机械传动机构的损耗和延时效应,系统将具有更快的响应特性和更高的效率。[7]
根据控制电机的方式,实现电子差速的方式基本分为两种:一是基于转速的电子差速控制策略,二是基于转矩的电子差速控制策略。前者主要是参考Ackermann转向模型的几何关系,确定各个驱动轮所需转速,并通过闭环控制实现转矩分配,跟踪理想车速的目的;后者是对轮毂电机采用直接转矩控制,将滑移率、质心侧偏角、横摆角速度的扰动值分别、部分或全部作为控制变量,以最大限度抑制这些扰动为目标调整电机电枢电流、实现各轮毂电机协同转矩控制。[8]
3.2 基于转矩控制的电子差速力矩分配
机械差速器的运动规律是:无论转弯行驶或直线行驶,两侧驱动车轮的转速之和始终等于差速器壳转速的2倍。常用的对称式锥齿轮差速器,其内摩擦力矩很小,实际上可以认为无论左右驱动轮转速是否相等,两边扭矩总是平均分配,这样的分配比例对于车辆在良好路面上直线或转弯行驶时,其运行状态都是满意的,但是车辆行驶工况复杂多变,至今还没有哪一种差速器可以满足所有路况下的功能要求。[9]
]研究了四轮马达独立驱动车辆的全轮转向控制策略。提出了一种基于神经网络PID电子差动的速度和转矩综合控制策略,用于四轮目标转速的计算。采用四个PID控制器在四个轮毂电机上实现转矩分配,并且实现电子差速转向。在不同参考转向角度和速度下的仿真结果表明,该策略可以提高车辆低速转向的操纵性和稳定性。
提出了一种高效、鲁棒的电动汽车电子差动系统控制方案。系统由两个无刷直流电机组成,采用反电动势过零检测方法对电机进行控制,保证电动汽车的两个后轮的驱动。电子差动控制器(EDC)保证最大转矩,可以独立控制驱动轮在任意曲线上以不同的速度转弯,也可以根据转向角度将动力分配给每台电机。实验表明:该方案具有令人满意的性能,并保证了车辆在所有道路条件下的稳定性。
介绍了一种用于后轮驱动、两个电机驱动的电动汽车的电子差速器。所提出的架构包括通过简单的电机转矩控制器来驱动两个电机,通过平分每个电机的转矩。其原理与机械微分相似。其目的是提高电动汽车的传动系统效率,从而提高车辆的行驶里程。
提出了转向时驱动电机等转矩分配的自适应电子差速策略;基于Simulink和Carsim建立的分布式驱动电动汽车联合仿真平台,对比分析了不同转向行驶工况时等转矩分配电子差速策略的分布式驱动电动汽车和开放式机械差速器的集中式驱动电动汽车的差速性能以及操纵稳定性。仿真结果表明,两种驱动方式电动汽车的差速性能相同,相比于集中式驱动电动汽车的转向操纵稳定性,分布式驱动电动汽车转向操纵稳定性稍差。
针对后轮独立驱动电动轮汽车转向差速控制技术,在研究车辆转向过程中,车辆控制系统采集油门踏板信号,给出相应的总驱动力矩,结合采集到的方向盘转角和车速信号,计算出两侧驱动轮的转矩。通过增大外侧驱动轮转矩和减少内侧驱动轮转矩的方式实现力矩分配,不仅实现了电子差速功能,还合理分配了驱动轮转矩,产生正横摆力偶矩,从而对车辆转向起到辅助作用。
以上文献主要通过平均分配、转矩差分配或转向角分配的方式对电子差速技术上的驱动轮力矩分配。较好的分配方式还是以车辆转弯时的横摆角速度和质心侧偏角的扰动值为控制变量和保证滑移率最佳作为电子差速进行转矩分配的依据。
为实现轮毂电机驱动的纯电动汽车的差速稳定转向,在低速时设计了基于阿克曼转向模型的速度控制器,实现转弯时对理想车速的差速速度跟随;高速时设计了基于理想横摆角速度和质心侧偏角的PID理想横摆力矩控制器,通过横摆角速度误差和质心侧偏角误差产生的横摆力矩被分配到每个驱动轮,实现转弯时的四轮力矩合理分配。并通过仿真实验证明了控制策略的可行性和合理性。
针对轮毂式电动汽车在转弯时存在驱动轮相对滑移率受外界干扰大的问题,提出一种基于相对滑移率的电动汽车电子差速控制方法,设计了基于最优控制和滑模控制的线性二次型最优滑模控制器。采用前轮转向后轮驱动的轮毂式电动汽车作为研究对象,通过控制汽车的转矩协调百分比来控制驱动轮的输出转矩,从而控制了驱动轮的相对滑移率。仿真结果表明,该控制方法实现了车辆在转弯过程中驱动轮的相对滑移率最小,且提高了电子差速系统的抗干扰能力,有效地增强了系统的鲁棒稳定性,提高了车辆的行驶安全性。
对后轮毂电机驱动电动汽车的电子差速控制策略进行研究,提出了一种基于滑转率控制的 P-模糊 PID 双模态控制方法,建立了整车动力学模型和电机模型,设计了P-模糊PID 控制器,降低电动汽车两侧车轮的滑转率,并趋于理想值。仿真对比了常规的模糊控制方法,结果表明,系统动态响应速度提高,并且没有超调,提升了电动汽车的动力學特性,尤其是在低附着系数路面上的转向及加速行驶时的控制效果更为明显。
改进了传统仅以滑移率作为转矩分配依据的控制方法,采用更加主动的预分配与补偿分配相结合的控制方法,改善了汽车的转向稳定性、舒适性和安全性。转矩预分配模型根据车辆参数计算出各轮垂向载荷与整车质量的比值并以此为依据对各轮驱动转矩进行预分配并输送给转矩补偿控制器,转矩补偿控制器根据汽车各轮反馈的实际滑移率与路面识别控制器估算出的该路面下的最优滑移率的差值计算出各轮需要补偿的转矩,与预分配控制器得到的转矩相加后一起输送给轮毂电机;由于电机执行目标转矩信号时会有延迟和误差,这里将轮毂电机输出的实际转矩反馈到电机控制信号的输入端与转矩补偿控制器的输出目标转矩比较,由 PID 控制器进一步优化控制效果。
除了以上转矩分配策略外,近年来优化控制的分配方式也成为了转矩分配中主要考虑的问题。
为了提高车辆的操纵性和降低能耗,提出了一种基于多目标优化的车轮扭矩分配策略。在高层方法中,由于模型误差和参数误差,采用滑模控制来计算所需的偏航力矩。底层采用由偏航力矩控制偏置、驱动系统能量损失和转差率约束组成的惩罚函数进行车轮转矩控制分配的数学规划。为降低计算成本,将离线优化和在线优化相结合进行编程,并将优化结果作为转矩命令发送给电机控制器。基于MATLAB和Carsim的协同仿真表明,所开发的策略既能提高车辆的可操作性,又能降低能耗。
针对分布式驱动电动汽车转弯工况转矩优化分配问题,建立了永磁同步电机的效率优化模型,并提出了基于模型的转弯工况下效率最优的转矩分配算法,实现了转弯时转矩分配的问题,同时实现了电子差速问题。仿真结果表明:转弯工况下的能效优化效果与转向角成正比。基于提出的优化算法,分布式驱动电动轿车最大转向角下的能效提升效果可达2.5%。
厦门金龙客车苏亮[21]针对某型分布式驱动电动客车以经济性指标,节能控制为目标,对驱动扭矩分配控制策略进行优化。首先根据油门踏板,制动踏板和车速计算出电机需求驱制动扭矩。在驱动模式下,将需求扭矩与电机允许最大扭矩值相除,得到负荷率系数,若该系数大于预定义的阈值,则进入四轮驱动模式,电机根据扭矩分配系数进行驱动扭矩的分配;若该系数小于阈值,则进入后轮驱动模式。在制动模式下,采用以上同样原理。其中阈值与扭矩分配系数是以节能为控制目标,使用多岛遗传算法进行优化的变量。
根据车速和稳定性参数制定了适应车速变化的四轮转矩分配策略。在低速时,为改善转向机动性能,依据阿克曼转向关系,以参考车轮转速为控制目标,通过调节两侧车轮驱动转矩达到跟踪理想车轮转速的目的,实现驱动轮的主动差速;在高速时,为提高车辆转向行驶的稳定性,通过二次规划方法优化分配各车轮驱动力矩,分析轮胎纵横向附着裕度建立目标函数,并加入附加横摆力矩和路面附着力的限制,进行车轮驱动转矩的在线优化分配。
为了提高四轮式独立驱动电动汽车在具有不同附着系数的道路上(例如在联合道路和?分割道路上)的转向稳定性,提出了一种分层电子转向控制策略。上层控制器基于道路附着力的影响,在直接偏航力矩控制中实现了质心侧偏角和侧滑角的自适应控制。下层控制器设计为双层次结构,可以根据道路附着系数自适应地改变扭矩分配算法,并实现每个车轮扭矩的不同权重控制。在RT-LAB测试平台和实时汽车测试中进行的实时仿真结果表明,在附着系数变化的道路上,四轮式独立驱动电动汽车的转向稳定性得到了改善。特别是在联合路和分岔路上进行的“双变道”测试,与普通控制策略相比,质心侧偏角误差降低高达55.1%,各轮内电机的输出转矩及其波动明显减小。
4 横向稳定性中的转矩分配
分布式驱动电动汽车横向稳定性属于汽车操纵动力学问题,主要与轮胎侧向力有关。当分布式电动汽车在高速过弯、变道以及在地面附着条件恶劣的情况下转向行驶时,会发生侧滑、急转和侧翻等失稳的危险工况,为解决横向稳定性问题,分布式电动汽车的横向稳定性控制技术在国内外各大高校和研究机构得到广泛的关注和研究。[24][25]
横向稳定性问题指的是车辆在转向过程中由侧向力引起的倾覆和侧滑等失稳现象。其次,由于分布式驱动电动汽车每个轮毂电机独立可控,通过合理分配各驱动轮的驱、制动力,可实现横向稳定性控制[26][27][28][36]。因此,通过研究控制过程中的力矩分配策略有利于横向稳定性的实现。
分布式驱动电动汽车的横向稳定性控制一般采用分层控制结构,包括顶层的信号采集层、中层的直接横摆力矩决策层和底层的车轮转矩分配层,其中,信号采集层主要通过传感器实时采集车辆状态参数;直接横摆力矩决策策略可以采用模糊控制、PID控制等不基于模型的控制算法,以及滑模控制、LQR控制、H∞鲁棒控制等基于模型的控制算法。针对车轮转矩分配层,学者们也深入开展了转矩分配策略的研究。
湖南大学袁希文等人[29]提出了一种考虑侧向稳定性的电液复合制动滑移率控制策略,通过主动前轮转向系统来补偿制动过程中车辆的侧向稳定性,再利用滑模极值搜算法设计滑移率控制器。电液扭矩协调控制采用动态控制分配法,通过增加执行机构速率的惩罚来扩展一般的二次规划控制分配算法,这样算法具有频率依赖性特性,同时考虑了执行机构带宽的问题。
提出一种新的横向稳定性控制策略和转矩分配策略。在横摆力矩决策层,采用基于状态观测的H∞控制算法进行直接横摆力的计算。鉴于分布式驱动电动汽车底盘布局的优势,在车轮转矩分配层中将差动制动与差动驱动结合。为了尽量让轮毂电机工作在额定率附近,提高电机效率,在直接横摆力矩较小时,首先在前轴两轮上进行转矩分配。为了最大限度地利用前轮附着极限,减小轮胎磨损,当前轮纵向滑移率超过最佳纵向滑移率时,驱动模式能由前轴两轮驱动切换至四轮驱动模式,驱动转矩采用等差值分配法。
厦门大学王进,郭景华等人[31]针对分布式电动汽车在高速转弯和变道时,由于其高度的非线性特性和参数的不确定性而出现失稳问题,提出了分布式电动车辆横向稳定性模糊滑模控制的方法。利用模糊逻辑对滑模控制器中滑模切换函数的系数不断进行调整优化,采用直接横摆力矩控制方法得出期望的附加橫摆力矩;最后使用平均分配原则实现附加横摆力矩的控制分配。
同济大学余卓平等人[32]研究了四轮轮毂电机驱动电动汽车通过驱动和制动转矩的分配控制达到提高整车经济性的方法。文中所谓的转矩分配控制是指:四轮轮毂电机驱动电动汽车的四个电动轮根据实际汽车的行驶要求(包括驱动和制动)实时进行四轮轮间转矩的分配,直至在四轮驱动和两轮驱动之间进行切换,力求达到系统的最佳经济特性。研究表明,转矩最优分配控制方法能够明显提高运行经济性,是一种具有良好应用前景的控制方法。
分布式驱动电动汽车的各个驱动轮可独立精准控制,具有多信息源的特点。通过考虑轮毂电机所获得的车辆状态参数,以及车辆的本身性能,多目标优化的分配方式也成为了学者们进行研究的内容。
西安交通大学续丹等人[33]提出了一种以提高驱动系统能效为目标的转矩分配策略。系统能效目标函数中包含了稳定性和经济性2个指标,旨在满足稳定行駛的同时尽量降低车辆的能量消耗。在横摆力矩、最大附着力和最大驱动力的约束条件下,对目标函数进行了求解,仿真结果表明,优化分配策略在保证车体稳定行驶的前提下,能够明显减少驱动系统的能量消耗,提高车体的系统能效.
针对分布驱动电动汽车的操纵和稳定控制问题,提出了一种基于纵向力分配优化的分层车辆稳定控制设计方法。开发了八自由度车辆模型和三层控制系统。上控制器引入虚拟控制将侧滑角和偏航率两个控制变量解耦,采用积分2自由度车辆模型计算车辆稳定性的等效偏航力矩。中间控制器在车辆执行器的约束下,利用线性二次优化方法优化前后转向角和轮胎纵向力的分布。在底层设计了基于滑动模式的滑动控制器,实现了车轮力矩的再分配。通过仿真实验验证了该设计方案的有效性。结果表明,该控制系统能有效地使车辆达到预期目标,提高了车辆在高速极端条件下的操纵稳定性和执行器失效情况下的主动安全性。
指出,连续且精确地调节每个车轮的驱动和制动扭矩被认为是在稳态和瞬态条件下控制车辆性能的最终目标。为此,必须开发专用的扭矩矢量(TV)控制器,该控制器可在所有可能的驾驶条件下实现最佳的车轮扭矩分配。可以通过基于优化的控制分配算法解决特定驾驶条件下的最佳单个车轮扭矩分配问题,该算法必须依赖于目标函数的适当选择。通过新开发的离线优化程序,评估了替代目标函数的性能,以实现四轮驱动全电动汽车的最佳车轮扭矩分配。结果表明,基于最小轮胎滑移准则的目标函数提供了比基于能量效率的函数更好的控制性能。
指出,电机可独立控制的方式为提高全电动汽车的操作性和能源效率提供了机会。通过离线优化程序评估了最小的电动机驱动器功率损失的最佳车轮扭矩分配,然后使用简单的函数进行了在线控制分配的近似。车轮扭矩分配方案通过模拟方法进行评估,该方法结合了以恒定速度进行的直行驾驶,坡道操纵和一系列步进转向操纵。与将扭矩均匀分布在四个车轮上的简单方法相比,节能车轮扭矩分配方案可降低电动机的功率损耗并节省总功率。该方法不依赖复杂的在线优化,并且可以应用于实际的电动车辆,以提高效率,从而减少不同操纵期间的功耗。
为了提高电动汽车的操纵性能和稳定性,提出了一种针对4个独立轮式电机的电动汽车的最优转矩分配方法。提出了一种新的目标函数,通过考虑不同性能指标之间的干扰,以多功能的方式工作:车辆重心的力和力矩误差、执行机构控制力度和轮胎工作负荷使用。为了适应不同的驾驶条件,设计了一种加权因子调整方案来调整目标函数中各性能指标的相对权重。通过仿真,验证了所提出的最佳转矩分配方案的有效性。在不同驾驶场景下的仿真结果表明,所提出的控制策略可以有效地提高车辆在湿滑路面条件下的操纵性能和稳定性。
吉林大学的武冬梅[38]在分析常见力矩分配方式对车辆性能的影响的基础上,提出“前后轮节能分配、左右轮安全调节”的综合力矩分配方法,满足横摆力矩需求,同时保证了车辆的节能性和安全性。
文献[39]提出具有四个单独控制的传动系统的电动汽车是过驱动的系统,可以通过无限数量的可行车轮扭矩组合来实现总车轮扭矩和横摆力矩要求。因此,四个传动系统之间的节能扭矩分配对于减少传动系统的功率损耗和扩大行驶范围至关重要。可以根据车速,将最佳扭矩分配公式化为参数优化问题的解决方案。在实验确认的假设下,为传动系相等的情况提供了一种解析解决方案,该假设是,传动系功率损耗严格随扭矩需求而单调增加。通过在电动汽车演示器上的模拟和实验,沿着行驶周期和转弯动作,对易于实施且计算快速的车轮扭矩分配算法进行了验证。与替代的扭矩分配策略相比,结果表明可节省大量能源。
针对四轮电机独立驱动电动汽车,提出了一种电子稳定控制算法,利用电机驱动和再生制动力矩分配控制来提高汽车的稳定性。其中转矩分配算法分别采用平均转矩分配策略、基于轮胎动力载荷的转矩分配策略和基于最小目标函数的最优转矩分配策略来控制电机驱动转矩或再生制动转矩以提高车辆稳定性。提出的三种扭矩分配策略可用于调节车辆完成“单变道”、“双变道”和“蛇变道”等任务。仿真研究表明,与不使用稳定控制相比,使用所提出的最优转矩分配算法的偏航率误差均方根[RMS]平均降低了75%。
北京理工大学林程等人[41]在加速转向联合工况下的车轮驱动转矩控制分配问题上,基于分层结构搭建了分布式电驱动汽车操纵性与驱动节能控制策略。所提策略上层进行广义控制力矩决策,基于滑模控制进行主动横摆力矩计算;策略下层进行车轮转矩控制分配构建了以提高车辆操纵性、降低电能损失为目标的优化问题,并基于离线计算和在线优化相结合的方式进行求解。与车轮转矩平均分配相比,基于离线计算的分配或基于离线计算加在线优化算法控制下,车辆操纵性都有较明显提高。
提出了一种新的目标函数,它以多函数的方式工作,考虑三种不同的性能指标:最小化重心力和力矩误差,最小化执行器控制效果和最小化轮胎工作负载。通过在不同工作情况下对目标函数进行调整权重系数,并给出了优化问题的封闭解。仿真结果表明,该控制方案能够提高四轮独立电机驱动的电动汽车的操纵性能和稳定性。
为了提高四轮驱动车辆的操纵性能和稳定性,提出了一种最优转矩分配控制方法。首先,提出了一种新的多功能的目标函数,以使期望力和力矩和实际力和力矩的误差最小为目标函数。然后,根据驾驶条件,设计权重因子来调整目标函数中不同性能指标的相对权重。此外,还提出了一种基于滑动模观测器的轮胎力估计方法,以提高轮胎力估计的精度。最后,仿真结果表明,该控制方法可以提高四轮独立马达车辆的操纵性能和稳定性。
针对四轮电机驱动电动汽车横向稳定控制系统,提出了非线性和制动器冗余问题。轮胎非线性问题的求解采用非线性模型预测控制方法求解目标的直接横摆力矩。以各轮胎负荷率最小最为优化目标,纵向力和横摆力矩作为限制条件。制动时,电机的制动力与液压制动联合应用。仿真结果表明,所提出的控制方案能有效地跟踪所要求的偏航率和船侧角,并保证了车辆的横向稳定性。
针对分布式驱动车辆系统非线性的特性,提出一种基于最优转矩矢量控制的车辆侧向稳定性控制系统。借鉴近似线性二次型规划的最优控制思想,设计基于质心侧向加速度的增益可调的横摆转矩控制方法,并根据驱动电机峰值转矩和轮胎摩擦圆的约束条件进行转矩矢量分配。仿真和硬件在环实验结果表明,控制系统能对车辆进行有效的实时控制,在显著改善车辆稳定性的同时不严重影响车辆的纵向性能。
针对分布式驱动电动汽车在驱动滑转和电机失效时会引起驱动力下降及产生非期望横摆力矩,提出了一种以提高轮胎附着裕量和改善驱动性能的转矩分配策略。建立包含轮胎利用率和纵向驱动力2个性能的目标函数,基于广义横摆力矩决策控制,并在驱动防滑、电机失效、最大驱动转矩和路面附着的约束条件下,应用全局序列二次规划法求解目标函数。仿真试验结果表明:该分配策略在保证车辆稳定性的前提下改善了车辆的动力性能,同时提高了车轮附着裕量。
针对前后轴双电机电动汽车的效率提升问题,设计了基于电机效率最优和基于电池效率最优的前后轮双电机转矩分配方法。研究发现这两种效率最优的方法在转矩分配上存在冲突现象,因此,采用一种多目标粒子群优化算法求得同时顾电机效率和电池效率的最优策略,从而避免两种策略同时工作时出现的竞争现象。仿真和实验结果表明,采用多目标粒子群优化算法的前后轴双电机转矩分配方案可以提高电动汽车的系统效率和续航里程。整车动力学分析表明,采用多目标粒子群优化算法的前后轴双电机转矩分配方案不会对整车的稳定性和平顺性产生影响。
以上,主要以近十年的研究内容分析,可以发现,分布式电动汽车横向稳定性中所涉及到的转矩分配的问题,多趋向于采用基于优化的控制方法,根据车辆状态将最佳扭矩分配公式转换成多参数优化的问题进行解决。通过优化控制方法分配转矩,可在保证汽车稳定行驶的同时,最大程度地提高驱动系统的能源效率以及其他性能。
5 总结
分布式驱动电动汽车的底盘由传统的机械连接变为电气连接,为突破底盘线控技术对智能网联车发展意义重大。同时,分布式驱动电动汽车的四轮力矩具有独立且可快速精准控制的特点,具有明显的控制优势,为方便进行连续多种动力学控制和车辆稳定性提高提供了重要的硬件条件。
对分布式驱动电动汽车的驱动电机进行合理的力矩分配在电子差速技术和横向稳定性方面有着重要作用。在电子差速技术上,在各个驱动轮上进行合理的转矩分配能够实现电子差速的功能,同时保证转向稳定性。在横向稳定性方面,合理的转矩分配能够实现转向过程中稳定性的提高。
综合对比了多种转矩分配策略,现如今,转矩分配发展为以多目标优化控制的分配方式为主。转矩优化控制分配的方式能够考虑汽车的各项参数和性能,改善整车的稳定性,降低能耗,提升动力性能等,现已成为了分布式驱动电动汽车的焦点。
文章主要讨论了电子差速技术和横向稳定性两方面的转矩分配策略,由于驱动电机独立控制,针对分布式电动汽车潜在的多电机失效的情况,各驱动轮如何协调工作,如何进行转矩分配控制未做讨论,这对于发挥分布式电动汽车的优势仍然具有重要意义。
参考文献
[1] 余卓平,冯源,熊璐.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报,2013,49(8):105-114.
[2] 王震坡,薛雪,王亚超.基于自适应无迹卡尔曼滤波的分布式驱动电动汽车车辆状态参数估计[J].北京理工大学学报,2018,38(07): 698-702.
[3] 中国科协第390次青年科学家论坛:分布式驱动电动汽车关键技术与产业化前景.
[4] Muratas.Innovation by in-wheel-motor drive unite.[J]Vehicle System Dynamics,2012,50(6):807-830.
[5] 陳清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002.
[6] Park Jung-Woo,Koo Dae-Hyun, Kim Jong-Moo,et al.High Perfor -mance Drive Unit for 2-Motor Driven Electric Vehicle. Proceedings of the Fourteenth Applied Power Electronics Conference and Expo -sition. Dallas: IEEE.1999.
[7] 李孟良,李洧,方茂东,刘向民等.道路车辆实际行驶工况解析方法研究[J].武汉理工大学学报(交通科学与工程版),2003(01):69-72.
[8] 姚芳,林祥辉,吴正斌等.电动汽车电子差速控制技术研究综述[J/OL].自动化学报:1-14[2020-06-09]. https://doi.org/10.16383/ j.aas.c190293.
[9] 葛英輝,倪光正.新型电动车电子差速控制策略研究[J].浙江大学学报(工学版), 2005(12):1973-1978.
[10] L. Zhai and S. Dong, Electronic differential speed steering control for four in-wheel motors independent drive vehicle,2011 9th World Congress on Intelligent Control and Automation, Taipei, 2011, pp. 780-783.
[11] Ravi A, Palani S. Robust Electronic Differential Controller for an Electric Vehicle[J]. American Journal of Applied Sciences, 2013, 10(11): 1356-1362.
[12] J. Folgado, S. S. Valtchev and F. Coito, Electronic differential for electric vehicle with evenly split torque, 2016 IEEE International Power Electronics and Motion Control Conference (PEMC), Varna, 2016, pp. 1204-1209.
[13] 唐自强,龚贤武,赵轩等.分布式驱动汽车自适应差速仿真研究[J].合肥工业大学学报(自然科学版),2017,40(10):1320-1325.
[14] 张厚忠,苏健,张勇.电动汽车低速转向电子差速兼顾辅助转向控制[J].重庆理工大学学报(自然科学),2017,31(08):14-21.
[15] 陈江松,童亮,陈勇.纯电动汽车轮毂电机驱动电子差速研究[J].北京信息科技大学学报(自然科学版),2018,33(05):88-92.
[16] 臧怀泉,戴彦,张素燕等.一种基于相对滑移率的电动汽车电子差速控制方法研究[J].机械工程学报,2017,53(16):112 -119.
[17] 陆文昌,张勇,张厚忠.轮毂电机驱动汽车电子差速系统P-模糊PID控制研究[J].机械制造与自动化,2017,46(06):193-196.
[18] 王亚楠,严世榕,吕兵兵等.分布式驱动电动汽车电子差速系统仿真研究[J].机电工程,2018,35(10):1128-1132.
[19] Lin, C. Xu, Z. Wheel Torque Distribution of Four-Wheel-Drive Electric Vehicles Based on Multi-Objective Optimization. Energ -ies2015, 8, 3815-3831.
[20] 马良峰,李建秋,高明明.分布式驱动电动汽车转弯转矩优化方法与仿真验证[J].中国科技论文,2017,12(07):754-757+769.
[21] 苏亮.分布式驱动电动客车驱动扭矩分配控制策略研究[J].客车技术与研究,2019,41(03):5-7.
[22] 胡金芳,颜春辉,赵林峰等.分布式驱动电动汽车转向工况转矩分配控制研究.中国公路学报.http://kns.cnki.net/kcms/detail/61. 1313.U.20200602.0907.002.html.
[23] R. Hou, L. Zhai, T. Sun, Y. Hou et al, Steering Stability Control of a Four In-Wheel Motor Drive Electric Vehicle on a Road With Var -ying Adhesion Coefficient, in IEEE Access, vol. 7, pp. 32617- 32627, 2019.
[24] Xiong L,Teng G W,YU Z P,et al. Novel stability control strategy for distributed drive electric vehicle based on driver operation inten -tion[J].International Journal of Automotive Technology, 2016,17 (4):651-663.
[25] Alipour H, Sabahim, Sharifian M B B.Lateral stabilization of a four-wheel independent drive electric vehicle on slippery roads [J]. Mechatronics, 2015,30 (2) :275-285.
[26] 余卓平,肖振宇,冷搏,等.分布式驱动电动汽车操纵稳定性控制评价[J].华东理工大学学报, 2016, 33(5): 25-32.
[27] C. Hu, R. Wang, F. Yan, Y. Huang, H. Wang and C. Wei, Differen -tial Steering Based Yaw Stabilization Using ISMC for Indepen -dently Actuated Electric Vehicles, in IEEE Transactions on Intelli -gent Transportation Systems, vol.19, no.2,pp.627-638, Feb. 2018.
[28] 余卓平,王竑博,熊璐,等.分布式驱动电动客车驱动防滑控制效果分析[J].汽车技术,2016(3): 18-25.
[29] 袁希文,文桂林,周兵.考虑侧向稳定性的分布式电驱动汽车制动滑移率控制[J].西安交通大学学报,2015,49(05):43-48+121.
[30] 张志勇,王东涛,黄彩霞等.分布式驱动电动汽车横向稳定性与转矩分配控制[J].长沙理工大学学报(自然科学版),2017,14(02): 61-67.
[31] 王进,郭景华.分布式电动车辆横向稳定性模糊滑模控制[J].厦门大学学报(自然科学版),2018,57(02):279-284.
[32] 余卓平,张立军,熊璐.四驱电动车经济性改善的最优转矩分配控制[J].同济大学学报:自然科学版,2005,33(10):1355-1361.
[33] 续丹,王国栋,曹秉刚,等.独立驱动电动汽车的转矩优化分配策略研究[J].西安交通大学学报,2012,46(3):42-46.
[34] Y. Hu,X.-Z. Zhang, and Y.-N.Wang, Design of vehicle stability control of distributed-driven electric vehicle based on optimal torque allocation, in Proc. 33rd Chin. Control Conf., Jul. 2014, pp. 195-200.
[35] L.De Novellis,A.Sorniotti and P. Gruber, Wheel Torque Distribution Criteria for Electric Vehicles With Torque-Vectoring Differentials, in IEEE Transactions on Vehicular Technology, vol. 63, no. 4, pp. 1593-1602, May 2014.
[36] A. Pennycott, L.De Novellis,A. Sabbatini, et al. Reducing the motor power losses of a four-wheel drive, fully electric vehicle via wheel torque allocation, Proc. Inst. Mech. Eng., Automobile Eng., vol. 228, no. 7, pp. 830-839, 2014.
[37] Li B, Goodarzi A, Khajepour A, S Chen, et al. An optimaltorque distribution control strategy for four-independent wheel drive elec -tric vehicles. Vehicle System Dynamics, vol 53, issue 8, pp. 1172- 1189,2015.
[38] 武冬梅.分布式驱动电动汽车动力学控制机理和控制策略研究[D].吉林:吉林大学,2015.
[39] A. M. Dizqah, B. Lenzo, A. Sorniotti, P. Gruber, et al. A Fast and Parametric Torque Distribution Strategy for Four-Wheel-Drive Energy-Efficient Electric Vehicles, in IEEE Transactions on Indus -trial Electronics, vol. 63, no. 7, pp. 4367-4376, July 2016.
[40] L. Zhai, T. Sun and J. Wang, Electronic Stability Control Based on Motor Driving and Braking Torque Distribution for a Four In- Wheel Motor Drive Electric Vehicle, in IEEE Transactions on Vehicular Technology, vol. 65, no. 6, pp. 4726-4739, June 2016.
[41] 林程,徐志峰,张虹,等.分布式电驱动汽车驱动力矩优化控制分配[J].北京理工大学学报,2016, 36(7): 668-672.
[42] J. Hu, J. Tao, F. Xiao, X. Niu, et al. An Optimal Torque Distribution Control Strategy for Four-Wheel Independent Drive Electric Vehicles Considering Energy Economy, in IEEE Access, vol. 7, pp. 141826-141837, 2019.
[43] N. Zhang, H. Li, X. Zhang, and X. Lu, An optimal torque distribu -tion for electric vehicle based on sliding mode observer, in Proc. 36th Chin.Control Conf., Jul. 2017, pp. 9373-9378.
[44] S. Li, D. Zhao, L. Zhang,et al. Lateral stability control system based on cooperative torque distribution for a four in-wheel motor drive electric vehicle, 2017 36th Chinese Control Conference (CCC), Dalian, 2017, pp. 1119-1123.
[45] 谢伟东,徐威,付志军等.分布式驱动电动汽车的近似最优转矩矢量控制[J].汽车工程,2018,40(11):1308-1316.
[46] 黄开启,羅良铨,程健等.分布式驱动电动汽车综合性能转矩优化分配[J].控制工程,2019,26(11):2078-2085.
[47] 漆星,王群京,陈龙等.前后轴双电机电动汽车转矩分配优化策略[J].电机与控制学报,2020,24(03):62-70+78.
