基于CRUISE的电动拖拉机动力性能的优化研究
2020-12-15孙传东
孙传东
摘 要:由于电动拖拉机动力不足的限制,导致电动拖拉机不能在山区广泛使用,影响其动力不足的主要因素是爬坡度和牵引力。在电机参数固定的情况下,变速箱的制作工艺及大小受到限制,所以通过改变主减速器的传动比来改变电动拖拉机爬坡度和牵引力。文章利用CRUISE软件对电动拖拉机进行仿真,研究了主减速器传动比与爬坡度、牵引力的规律特性,提供了一种设计主减速器传动比的方法,以此来改善电动拖拉机的爬坡度与牵引力。
关键词:电动拖拉机;传动比;爬坡度;牵引力
中图分类号:S24 文献标识码:A 文章编号:1671-7988(2020)22-57-03
Abstract: Due to the limited power of electric tractors, electric tractors can not be widely used in mountainous areas. The main factors affecting their power shortage are slope climbing and traction. In the case of fixed motor parameters, gearbox production process and size is limited, so by changing the transmission ratio of the main reducer to change the electric tractor climbing slope and traction. In this paper, CRUISE software is used to simulate the electric tractor, and the regular characteristics of the transmission ratio, climbing slope and traction of the main reducer are studied. A method of designing the transmission ratio of the main reducer is provided to improve the climbing slope and traction of the electric tractor.
Keywords: Electric tractor; Transmission ratio; Climbing slope; Traction
CLC NO.: S24 Document Code: A Article ID: 1671-7988(2020)22-57-03
前言
随着石油资源的日益匮乏,柴油拖拉机逐渐退出了历史的舞台,电动拖拉机的使用引发了学者和设计者的广泛的关注。为了解决电动拖拉机存在的动力不足问题,仿真软件的使用是必不可少的。李崧[1]通过CRUISE软件搭建了轮式拖拉机仿真平台,对拖拉机进行性能研究;夏先文[2]利用CRUISE软件搭建纯电动拖拉机模型,并对各个档位下的最大牵引力及其工作速度进行了分析。本文利用完整的电动拖拉机数据,建立了电动拖拉机的仿真模型,针对爬坡度和牵引力进行了仿真分析,提供了一种设计主减速器传动比的方法,可对以后的电动拖拉机的爬坡性能和牵引力性能分析及使用提供有力的借鉴。
1 构建系统模型并建立物理及信号连接
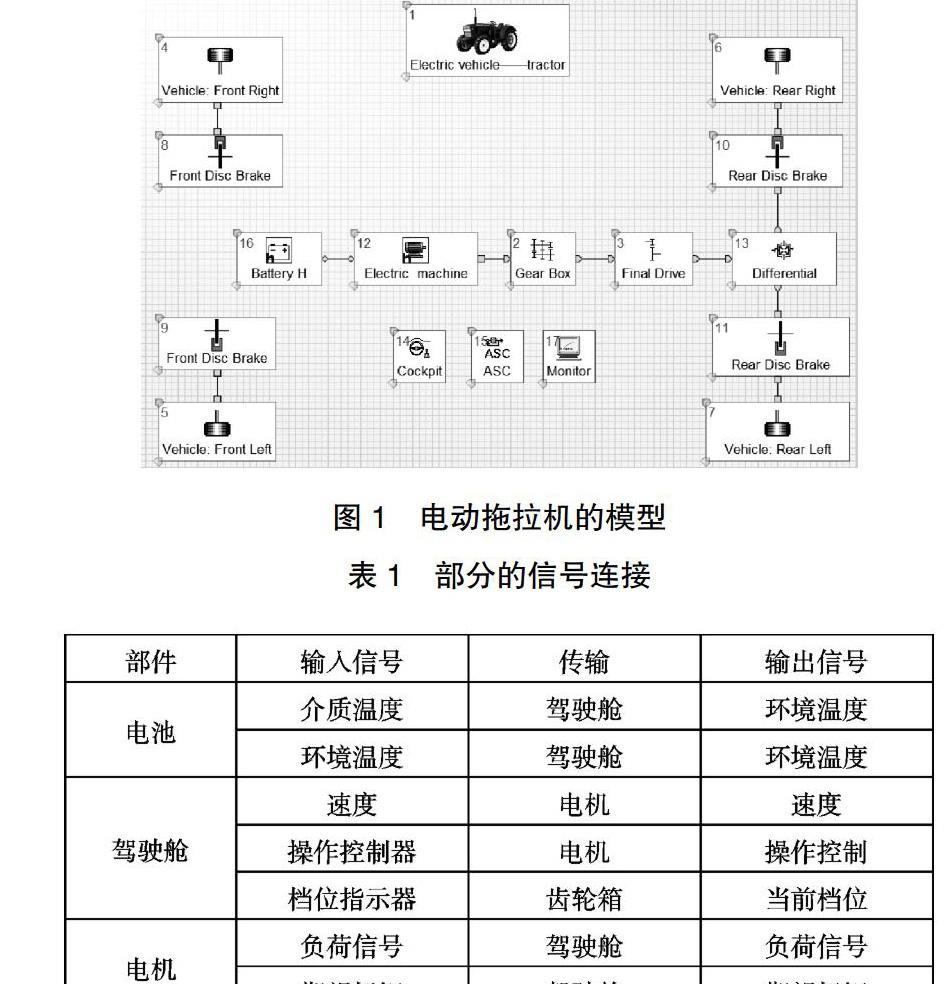
本文构建的电动拖拉机模型共包含了17个模块,由1个动力电池组模块,1个电机模块,1个变速箱模块,1个主减速器模块,1个差速器模块,4个制动器模块,4个轮胎模块,1个驾驶员模块,1个ASC模块和1个显示器模块等组成。
利用CRUISE仿真软件提供的模块建立电动拖拉机的仿真模型,电动拖拉机模型如图1所示。为了仿真结果的准确性,各个模块的信号连接,严格按照能量输入、输出关系进行总线数据连接和连接线连接,保证信号传递的正确性。其中驾驶舱、电池、电机对仿真至关重要,其信号连接如表1所示;制动器、车轮模块以及其他微小的零部件对仿真结果影响较小,这里不做展示。
2 设置各部件的参数
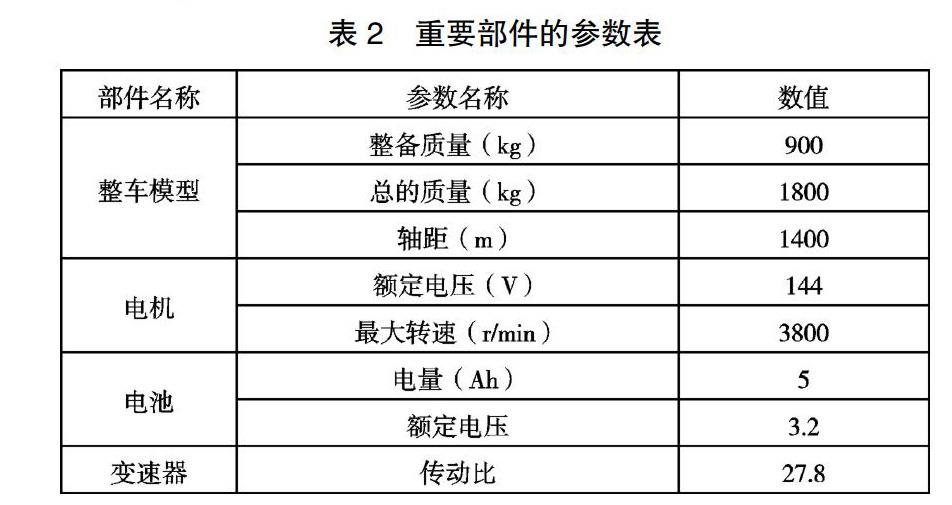
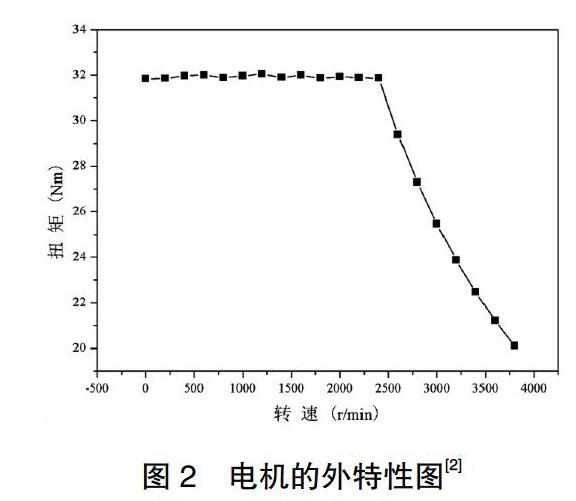
车辆整体模型的参数准确的描述了整车的整体结构形状及其质量,如整备质量,轴距等,对于保证仿真结果的准确性至关重要。这里仅对电动拖拉机的重要部件的参数做详细的介绍,如车辆整体模型的参数、驱动电机参数、电池参数等,重要部件的参数如表2所示,电动机外特性曲线设置如图2[2]。制动器、轮胎等元件对仿真结果影响较小,这里不再一一赘述。
3 电动拖拉机爬坡度与牵引力的分析
利用CRUISE仿真软件,能够对电动拖拉机的循环行驶工况、爬坡性能、稳态行驶、最高车速、最大牵引力等一系列任务进行仿真分析,本文重点对爬坡度和牵引力进行了深度分析。
由图3可知:
(1)小型电动拖拉机的动力性评价标准要求最高爬坡度大于等于20%。本例中i=1.058~3.058之间,最高爬坡度均大于20%,因此具有良好的爬坡性能。
(2)在主减速器不同传动比下,电动拖拉机在速度较小时爬坡度基本保持不变,随着速度增大爬坡度先急剧减小后逐渐趋近于零。因此在使用拖拉机时要适当的控制速度,例如i=3.058时,拖拉机的运行速度应大致保持在2km/h,此时爬坡度曲线还未开始下降,既不会使电动拖拉机速度过低,影响生产效率,又能保证电动拖拉机的动力性。
(3)爬坡度曲线图与电机的外特性曲线图的变化趋势相似,体现了电机额定转速前的恒转矩的特性。
由圖4可知:
不同主减速器传动比下速度与牵引力的关系图与速度与爬坡度的关系图具有很高的相似性,爬坡度与牵引力随速度变化的趋势几乎一致。
由表3可知,在电动拖拉机等于3km/h速度下,爬坡度曲线与牵引力曲线随主减速器的传动比的变化趋势。在实际生活中,我们为了适应山区复杂的地理环境,我们需要选取合适的传动比来获得高的爬坡度和牵引力。
一般小型电动拖拉机的动力性评价标准要求爬坡度大于等于20%,对于爬坡度来说,主减速器传动比的左边界为1.4;在传动比2.4~2.6之间,采用线性插值的方法进行估算,主减速器传动比的右边界为2.528;因此,合适的传动比大约为1.4~2.528。
小型电动拖拉机的动力性评价标准要求牵引力大于3800N,对于牵引力而言,在传动比1.8~2之间,采用线性插值的方法进行估算,主减速器传动比的右边界为1.945;在传动比2.4~2.6之间,采用线性插值的方法进行估算,主减速器传动比的右边界为2.446;因此合适的传动比大约为1.945~2.446。
另外我们还需要考虑到主减速器的大小受到机器本身限制,在满足生产要求所需的动力性后,我们应尽可能选取小的传动比来减小主减速器的体积。本例中的最佳传动比大约为1.945,既保证了较大的爬坡度和牵引力,又保证主减速器不占用过大的空间。
4 结语
在电动拖拉机爬坡度大于等于20%,牵引力大于3800N,工作速度为3km/h的情况下,绘制同一速度下不同传动比与爬坡度的关系表和同一速度下不同传动比与牵引力的关系表,通过插值运算的方式计算主减速器的传动比,提供了一种在一定生产条件下的主减速器传动比的设计方法,为今后其他电动拖拉机主减速器传动比的选择提供了借鉴。
参考资料
[1] 李崧.LH1620轮式拖拉机动力传动系统设计分析[D].镇江:江苏大学,2011.
[2] 夏先文,纯电动拖拉机驱动系统设计分析[D].河南:河南科技大学, 2015.
[3] 魏吉.汽车新能源与节能技术应用研究[J].科技风,2013,(08):104.
[4] 梁延会,夏长高.设施大棚履带式电动拖拉机动力学性能分析[J].农机化研究,2015,37(01):55-58.
[5] 张铁民,闫国琦,温利利,廖懿华.我国电动力农业机械发展现状与趋势[J].农机化研究,2012,34(04):236-240.
[6] 秦松.园艺电动拖拉机驱动系统控制策略研究[D].江苏大学,2019.
[7] 吕欣.小型純电动拖拉机驱动系统参数匹配与优化[D].湖南科技大学,2017.
