基于LSTM网络的车辆轨迹预测研究
2020-12-15张晓宁
张晓宁
摘 要:为了提高车辆在高速公路行驶时的安全性和舒适性,基于深度学习中的长短期记忆网络方法,提取车辆行驶过程中的特征参数,对车辆未来行驶轨迹进行预测,在驾驶模拟器上进行仿真与测试,结果表明该方法可以精准有效地预测出车辆行驶轨迹。
关键词:高速公路;轨迹预测;长短期记忆网络
中图分类号:U471.1 文献标识码:A 文章编号:1671-7988(2020)22-32-03
Abstract: In order to improve the safety and comfort of the vehicle driving on the highway, based on the Long Short-Term Memory network method in deep learning, this paper extracts the characteristic parameters of the vehicle driving process and predicts the future driving trajectory of the vehicle. The simulation and test are carried out on the driving simulator, and the results show that this method can accurately and effectively predict the vehicle trajectory.
Keywords: Highway; Trajectory prediction; Long and short-term memory network
CLC NO.: U471.1 Document Code: A Article ID: 1671-7988(2020)22-32-03
引言
精准实时地获得车辆在高速公路上行駛的轨迹参数,对于智能交通系统的管理有着重要的作用,通过预测车辆未来时刻的轨迹信息,能够有效评估驾驶安全性和舒适性,在有安全隐患时能够及时预警或改变行驶策略,避免碰撞事故的发生。目前很多研究人员根据运动学或动力学模型进行轨迹预测的建模,相关的研究主要涉及多项式拟合算法来对轨迹进行预测[1],由于车辆轨迹具有复杂性、多样性和随机性,使得预测出的轨迹在长时序上的精度不能满足实际需求。近些年来,基于数据驱动的算法在轨迹预测模型中得到广泛应用,对于复杂问题的拟合能力强。目前数据驱动模型主要有隐性马尔可夫[2]、动态贝叶斯网络[3]、深度学习[4]等算法,其中深度学习算法中的循环神经网络对时间序列问题具有较好的处理能力,对于具有多样性、不确定性的轨迹信息具有良好的表征能力。本文采用循环神经网络中的LSTM对车辆的未来行驶轨迹进行预测研究,并在驾驶模拟器上采集车辆轨迹进行模型验证。
1 循环神经网络
1.1 RNN网络
RNN是一种带有记忆功能的神经网络,适用于解决时间序列问题。然而随着时间间隔的不断累积,RNN网络存在梯度消失和梯度爆炸的问题,最终导致网络无法获取之前序列的有效信息,失去学习的能力[5]。
1.2 LSTM网络
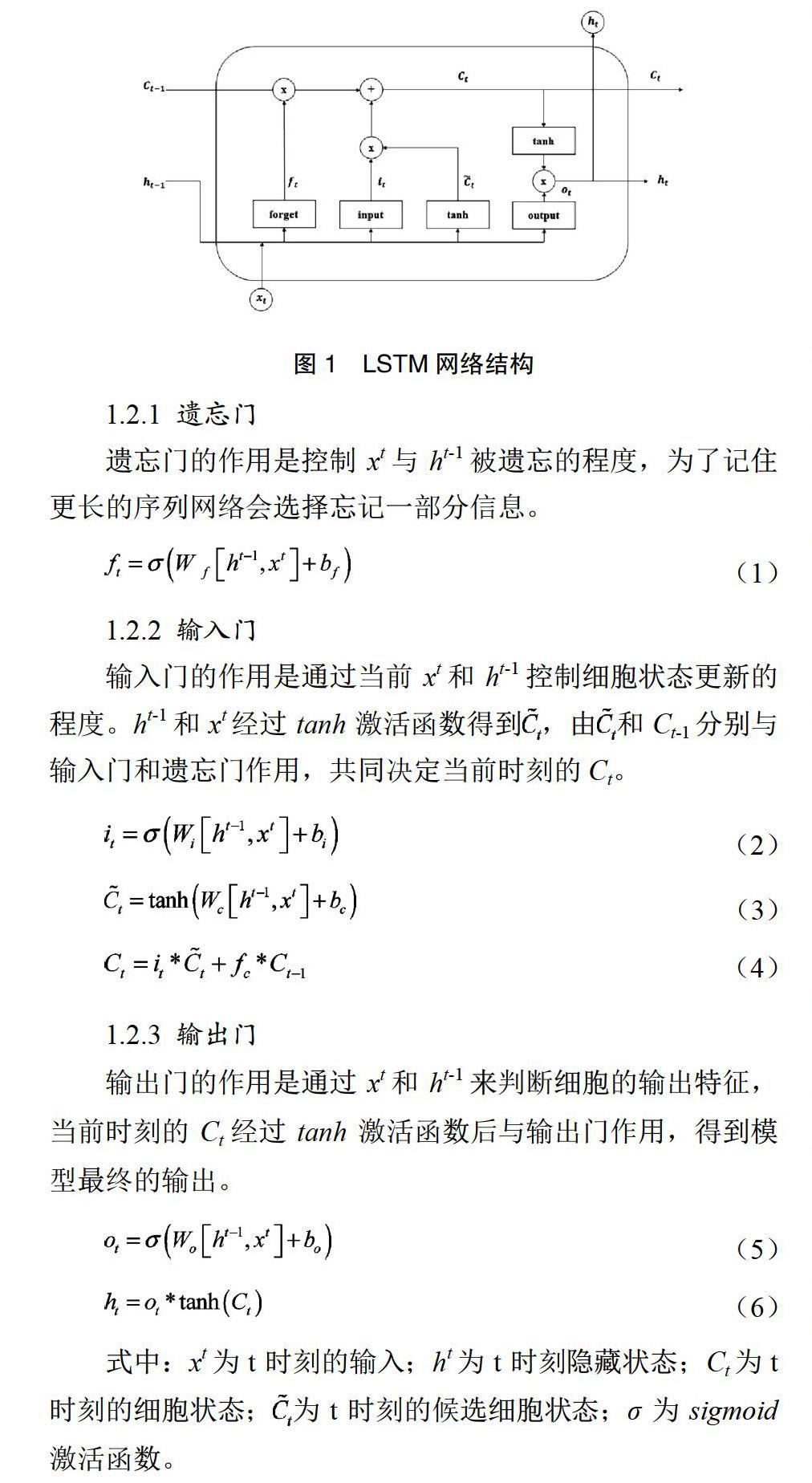
LSTM是RNN的一种变体,可以有效地解决上述这两个问题。LSTM网络的核心思想是存在能够随时间进行信息传递的细胞状态,该细胞状态通过网络中的各种门结构,对信息进行增删,使得网络具体记忆功能。LSTM网络中存在三种门,分别是遗忘门、输入门和输出门,每个门和细胞状态通过激活函数引入非线性要素,具体结构如图1所示。
1.2.1 遗忘门
遗忘门的作用是控制xt与ht-1被遗忘的程度,为了记住更长的序列网络会选择忘记一部分信息。
1.2.2 输入门
输入门的作用是通过当前xt和ht-1控制细胞状态更新的程度。ht-1和xt经过tanh激活函数得到,由和Ct-1分别与输入门和遗忘门作用,共同决定当前时刻的Ct。
1.2.3 输出门
输出门的作用是通过xt和ht-1来判断细胞的输出特征,当前时刻的Ct经过tanh激活函数后与输出门作用,得到模型最终的输出。
2 预测模型
2.1 模型特征
为深度挖掘车辆行驶过程中的历史轨迹信息,以自车车速、车辆的纵向坐标、车辆的横向坐标、纵向加速度、横向加速度与横摆角速度作为车辆的行驶特征来构建行驶预测模型,建立历史车辆轨迹与未来车辆轨迹特征数据之间的映射关系,t时刻的轨迹特征具体可以表示为:
3 试验与分析
3.1 数据采集与处理
在驾驶模拟器中,使用高速公路自由换道场景对车辆轨迹模型进行仿真与测试。采集车辆车速、车辆位置纵坐标、车辆位置横坐标、纵向加速度、横向加速度和横摆角速度作为表征车辆轨迹的特征值。
由于不同的特征具有不同的取值范围,为了减小不同量纲之间引起的误差,对数据进行归一化处理。为了得到实际预测结果,还需要对归一化后的数据进行反归一化。
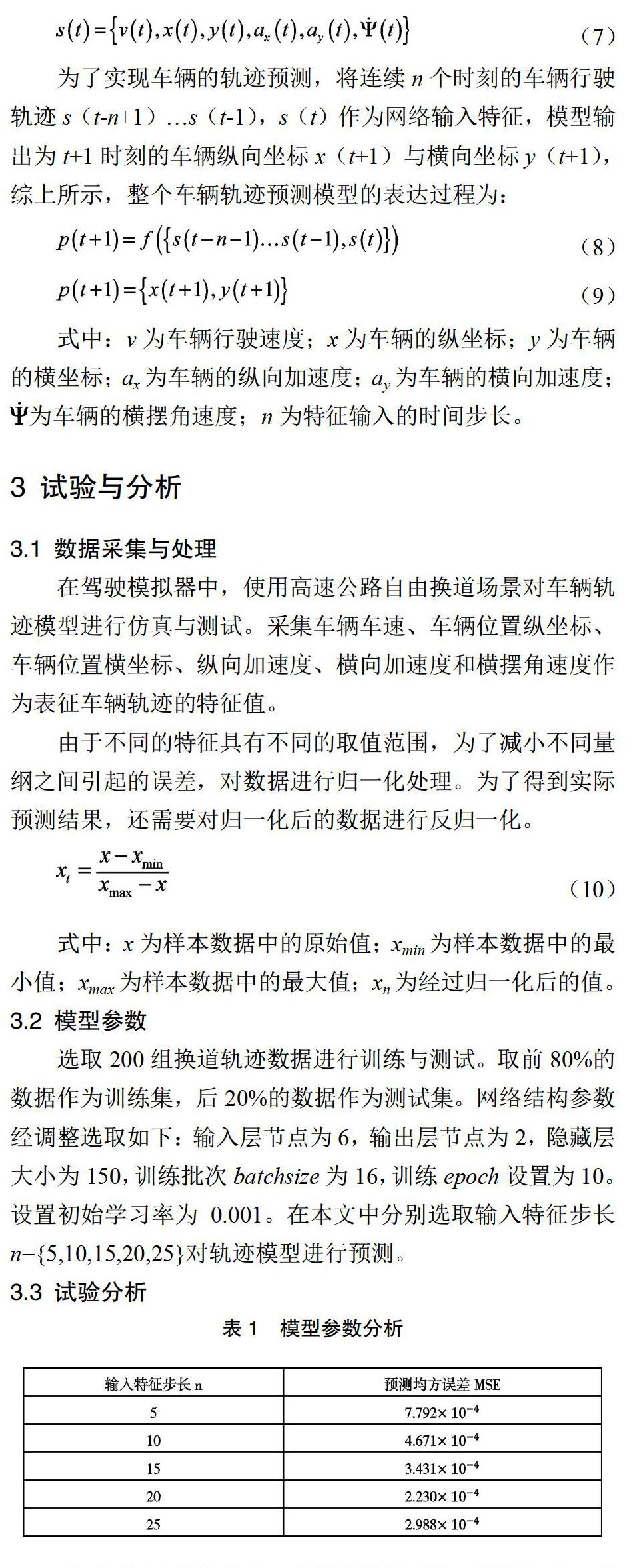
3.2 模型参数
选取200组换道轨迹数据进行训练与测试。取前80%的数据作为训练集,后20%的数据作为测试集。网络结构参数经调整选取如下:输入层节点为6,输出层节点为2,隐藏层大小为150,训练批次batchsize为16,训练epoch设置为10。设置初始学习率为 0.001。在本文中分别选取输入特征步长n={5,10,15,20,25}对轨迹模型进行预测。
3.3 试验分析
该模型具有良好的预测精度,说明lstm在处理时序问题上可以精准地预测出未来时刻车辆的轨迹,可以对车辆行驶轨迹进行有效监控和管理,对提高车辆行驶的安全性具有重要意义。
4 结论
车辆轨迹预测在智能交通系统中发挥着重要的作用,本文基于时序预测的LSTM网络根据已知的历史车辆轨迹信息进行建模,能够对目标车辆未来时刻的行驶轨迹进行有效、精准的位置预测,同时考虑了轨迹预测的精准性和时效性,有助于交通系统中车辆的状态监控与行为管理,提高车辆行驶安全性与通行效率。
参考文献
[1] 张颖达.基于NGSIM数据的车辆变道行为博弈模型[D],2016.
[2] Schreier M, Willert V, Adamy J. An Integrated Approach to Man -euver-Based Trajectory Prediction and Criticality Assessment in Arbitrary Road Environments[J].IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10):2751-2766.
[3] 李建平.面向智能驾驶的交通车辆运动预测方法研究[D],2018.
[4] 房哲哲.基于深度学习的换道行为建模与分析[D],2018.
[5] Juergen Schmidhuber. Gradient Flow in Recurrent Nets: the Diffi -culty of Learning Long-Term Dependencies[M]// Gradient Flow in Recurrent Nets: The Difficulty of Learning Long Term Dependen -cies.Wiley-IEEE Press,2001.
