全波形激光雷达波形数据无损压缩方法研究
2020-12-14陈瑞强
陈瑞强
摘 要:全波形激光雷达对目标回波信号进行完整记录和分析,具有测距精度高和目标特征提取丰富的优点。全波形激光雷达记录的回波波形数据量通常较大,对数据传输的带宽和存储器的容量提出了更高要求。回波波形数据有损压缩方法可有效降低数据量,但同时会丢目标完整波形,不利于后期数据处理。本文提出了一种利用阈值法的全波形激光雷达波形无损压缩方法,实现了回波波形的无损压缩与解压缩编码。
关键词:全波形激光雷达;无损压缩;压缩编码;解压缩编码
一、绪论
全波形激光雷达(Waveform-Digitizing LiDAR)将发射脉冲信号和回波脉冲信号均以很小的采样间隔进行采样并记录,用户根据实际应用需求,对记录的波形数据进行处理和分析,相比传统激光雷达,可以得到更丰富的激光回波次数和目标特征信息[1-3]。回波信号中目标有用信号的比例较小,例如发射脉冲脉宽为10ns,模数转换器采样率为1GSa/秒,最大探测距离取200米,每次回波需要采集约1300个点,如果回波中仅包含一个目标,有用信号的比例仅为10/1300=0.77%。因此设定阈值,仅输出和保存高于阈值的数据点,将有效降低波形数据量,实现数据压缩的目的。但这种压缩方式属于有损压缩,丢失了大量微弱信号数据,没有很好发挥全波形激光雷达数据后处理优势[4]。本文使用阈值分类方法,实现了全波形激光波形数据的无损压缩。该方法不需要生成字典,仅需要根据阈值截取适当位长的原始数据,计算量较少,可以取得较高的数据压缩比。
二、原理
压缩过程:根据分类阈值,对原始波形数据的采样点数据进行压缩,获得阈值类型和压缩数值组成的采样点压缩数据。采样点压缩数据采用首尾相连的方式组成数据区。模数转换器分辨率、采样点总个数和分类阈值组成数据头。数据头和数据区组成最终的压缩数据。解压缩过程:提取压缩数据的数据头,获取模数转换器分辨率、采样点总个数和分类阈值。提取压缩数据的数据区,根据阈值类型提取合适长度的采样点压缩数据,并结合模数转换器分辨率和分辨率阈值,依次恢复得到解压缩数值。解压缩数值依次相连组成原始波形数据。
三、算法
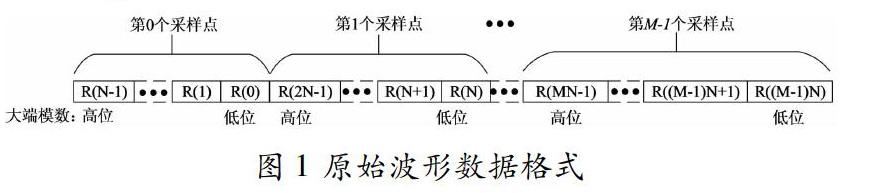
原始回波波形数据的格式如图1所示数据排列方式为大端模式:地址由小向大增加,而数据从高位往低位放。原始波形数据为长度N*M的一维数组。其中,N表示模数转换器分辨率,M表示回波中包含的采样点总个数。
(一)压缩编码
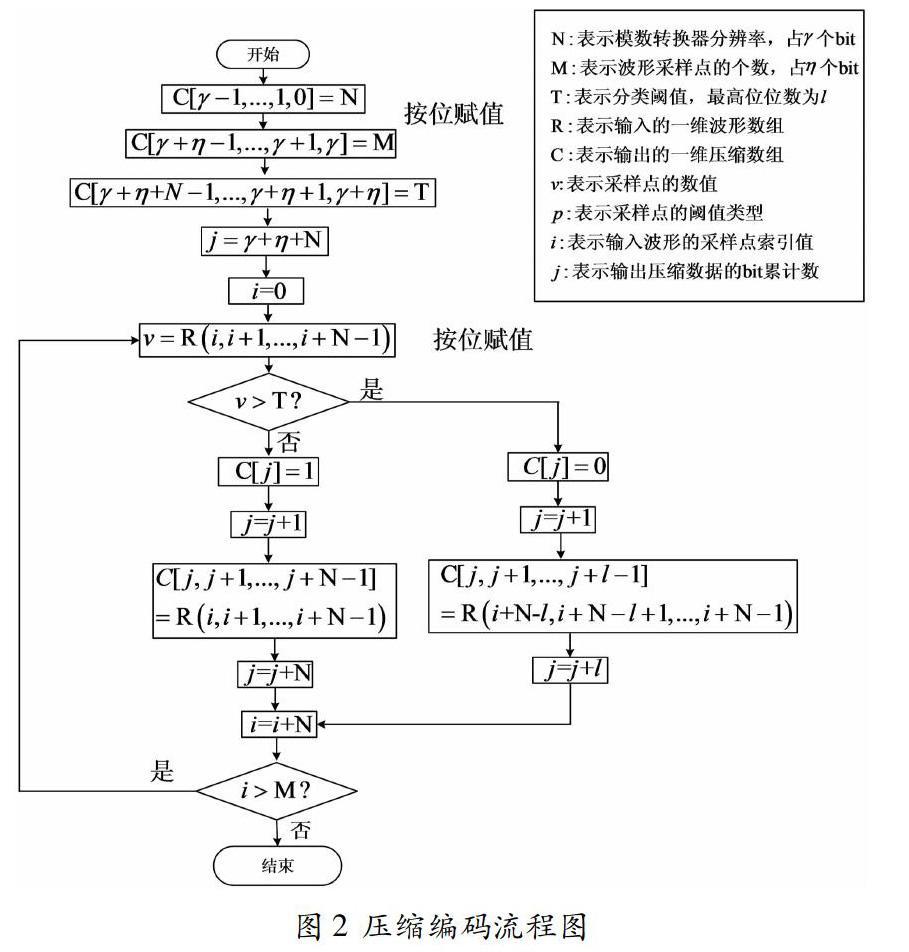
压缩编码的流程如图2所示。
1.确定分类阈值
根据回波的噪声大小,确定分类阈值。分类阈值一般选取为2倍的背景噪声均方根值。分类阈值占N个bit,其二进制的最高位位数为l。例如,模数转换器分辨率为8位,分类阈值的二进制值为00000101,则l=3。
2.数据压缩
根据分类阈值,对原始回波波形的每个采样点进行压缩,参考图3,采样点压缩数据由阈值类型和压缩数值两部分组成。其中,阈值类型占据1bit,其值为0或1。当采样点数值>分类阈值时,阈值类型为1,否则为0。其中,压缩数值占据l个bit或N个bit。当阈值类型为1时,压缩数值占据N个bit。当阈值类型为0时,压缩数值选取采样点低l位的数据,占l个bit。
3.数据输出
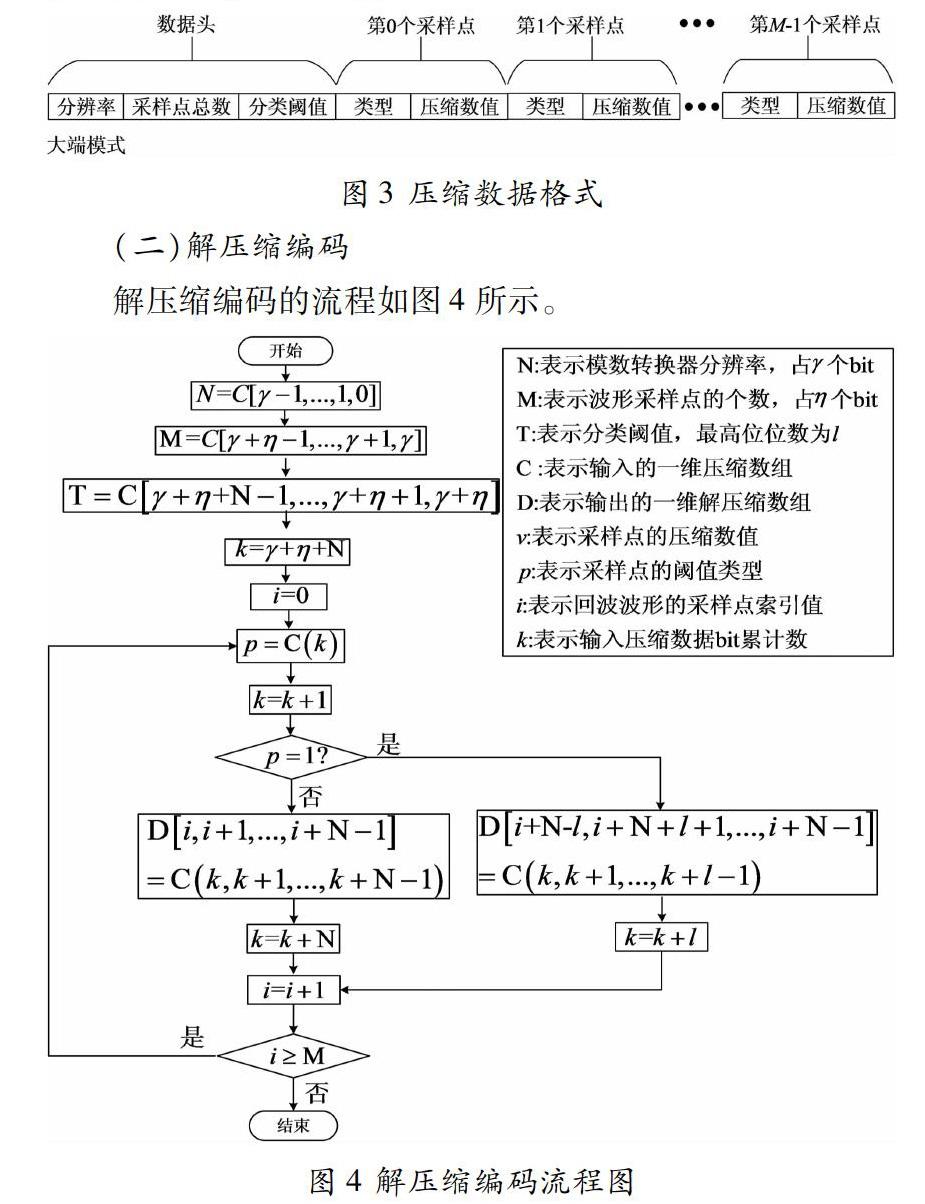
如图3所示,输出的压缩数据由数据头和数据区构成。其中数据头包含模数转换器分辨率(占γ个bit)、采样点总个数(占η个bit)和分类阈值(占N个bit);数据区包含M个首尾相连的采样点压缩数据。
(二)解压缩编码
解压缩编码的流程如图4所示。
1.数据头提取
提取波形压缩数据的数据头,得到模数转换器分辨率N、原始波形采样点总个数M和分类阈值(其二进制值的最高位位数为l)。
2.数据解压缩
根据采样点压缩数据的构成方式,依次提取1bit的阈值类型和N或l个bit的压缩数值:当阈值类型为1时,取N个bit的压缩数值;当阈值类型为0时,取l个bit的压缩数值。
初始化一个初始值全部为0的解压缩数组,该数组可以存放M个解压缩数值。当阈值类型为1时,将N个bit的压缩数值直接赋给解压缩数值;当阈值类型为0时,将l个bit的压缩数值赋给解压缩数值的低l位。
四、结语
本文提出了一种全波形激光雷达波形数据无损压缩方法,在保证回波波形不失真的条件下,可有效压缩数据传输量,降低了对系统带宽和存储器存储空间的要求。
参考文献:
[1]Hug C.,Ullrich A.,Grimm A.Litemapper-5600-a waveform-digitizing LiDAR terrain and vegetation mapping system[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,36(Part 8):25-29.
[2]程華.激光雷达回波信号处理技术研究[D].成都:中国科学院光电技术研究所,2015.
[3]骆社周.激光雷达遥感森林叶面积指数提取方法研究与应用[D].北京:中国地质大学,2012.
[4]Verdin B,Von Borries R.Lidar compressive sensing using chaotic waveform[J].Proceedings of SPIE,2014.
