测量机器人在宝瓶河水电站大坝变形监测基准网中的应用
2020-12-14庹世华马江河
庹世华,马江河
(甘肃省张掖市甘兰水利水电建筑设计院,甘肃 张掖 734000)
1 基本情况
宝瓶河水电站位于甘肃省肃南裕固族自治县和青海省祁连县交界内陆河黑河上游,是黑河上游规划建设的第二座水电站,上游距拟建的黄藏寺水电站15.6km,下游距已建的三道湾水电站厂房26.2km,距张掖市约165km。工程主要任务是发电,采用引水式开发,首部枢纽与发电厂房相距8.6km。坝址以上流域面积7851km2,多年平均流量40.4m3/s,多年平均径流量12.74亿m3。枢纽工程由首部枢纽、引水系统及发电厂房等组成,为3等中型工程。大坝因坝高超过80m,提高一级按2级建筑物设计,引水系统和发电厂房按3级建筑物设计。 大坝为混凝土面板堆石坝,最大坝高93.5m,坝顶高程2528.60m,防浪墙顶高程2529.80m,坝顶长147m,坝顶宽8m。上游坡比为1∶1.45,下游坝坡2497.00m高程以上为1∶1.5,2497.00m高程以下为1∶1.4。
泄水建筑物由潜孔式溢洪道和泄洪排沙洞组成。溢洪道布置在大坝左岸,共3孔3槽,单孔孔口尺寸8.0m×9.52m(宽×高),堰顶高程2511.00m,采用扩散挑流消能,最大泄量1738m3/s;泄洪排沙洞进口布置在左岸山梁上,由导流洞后期经过龙抬头改建而成,总长369.42m,孔口尺寸8.0m×7.0m(宽×高),底板高程2480.00m,采用挑流消能,最大泄量1262m3/s。
2 监测基准网方法选择
在国内大坝变形监测基准网普遍采用GNSS静态观测,因宝瓶河水电站大坝位于高山峡谷地带,两侧山体陡峭,山体坡度达到60%~70%,使用GNSS静态观测受限条件较多,实施难度大。该电站大坝在施工及建成初期运营阶段监测基准网采用视准线法进行,但由于工作基点的不稳定性与监测点的同步性问题,不能精确反应大坝变形情况,给电站大坝运行安全性判定带来了困难。基于上述原因,该电站大坝采用高精度测量机器人,配合徕卡圆棱镜边角测量进行监测基准网建设。以下对测量机器人做一介绍。
测量机器人具有极高的智能化和自动化,标称测角精度为±0.5″,测距精度为(0.6mm+1ppm×D),具有自动目标识别(Automatic Target Recognition)简称ATR,具有4重角度探测,仪器有伺服马达旋转180°只需2.3s,倒镜只需2.9s,自动搜索圆棱镜能达到1000m,能对目标棱镜进行快速自动识别照准,按照设计观测顺序自动进行多测绘数据采集记录。测量机器人具有以下优点:①外部观测环境受限条件少;②ATR测角精度达到±0.5″;③测距精度0.6mm+1×10-6D;④可以精确进行气象元素改正;⑤机载多测回测角软件程序控制进行自动测量,能极大减轻作业人员劳动强度和节省9/10的作业时间;⑥可以进行全时段观测;⑦在观测过程中自动监测各项观测限差,若限差超限还能自动进行补测重测;⑧同一测站多测回观测时速度快,有效克服外界因素影响。
通过该方法,有效克服宝瓶河水电站大坝监测外界环境的影响,提高监测精度和效率,降低作业难度和成本。
3 监测基准网方案
3.1 基准网观测等级选择及技术要求
根据SL197—2013《水利水电工程测量规范》中表11.12.2各工程类型首级平面控制网等级选择规定,大型水利水电工程中的土石建筑物,首级平面控制网等级可以选择3、4等,由于该工程为中型水利水电工程,大坝为2级建筑物,故该工程大坝监测基准网等级选择为3等。根据SL197—2013中表11.12.4-1 边角组合网、测边网技术要求规定,该电站大坝基准网建设技术要求为边长300~1000m,测角中误差±1.8″,三角形最大闭合差±7.0″,平均边长相对中误差1/150000,测距仪标称精度±3mm/km。
3.2 基准网布设及观测方法
3.2.1基准网布设
本项目先期对原有监测基准网进行踏勘与分析,能使用的只有大坝坝顶右岸基岩上的BK1和溢洪道旁边基岩体上的BK2。根据现场分析,其他已有基准点都无法使用,要控制大坝区域还需要建设5个基准点,以保证监测基准网几何强度最高、精度最优为原则。根据现场地形地貌条件,在大坝左岸山腰基岩处增设BK3,在左岸泄洪冲沙闸上增设BK4,在库区上游能通视的基岩上增设BK5,在右岸库区上游增设BK6,在库区上游右岸垂直于大坝处增设BK7,这样构成一个最优监测基准网,最弱点有3个通视方向,最强有6个方向。如图1所示。

图1 基准网布设
3.2.2观测方法
先期选择使用原有控制网BK1作为起算数据X=2000.0000、Y=2000.0000,使用BK1与BK6的方位角作为起算方位角,使用BK1至BK6的水平距离推算BK6的平面坐标为X=1560.4920、Y=1803.4390。
根据边角组合网、测边网技术要求结合TS50观测速度我们选择9个测回组合,观测边角顺序为:①将BK1作为测站观测至BK6、BK4、BK3、BK2、BK7的夹角与边长;②将BK2作为测站观测至BK6、BK3、BK1、BK7的夹角与边长;③将BK3作为测站观测至BK1、BK7、BK6、BK4、BK2的夹角与边长;④将BK4作为测站观测至BK1、BK7、BK6、BK5的夹角与边长;⑤将BK5作为测站观测至BK6、BK4、BK7的夹角与边长;⑥将BK6作为测站观测至BK1、BK7、BK5、BK4、BK3、BK2的夹角与边长;⑦将BK7作为测站观测至BK1、BK6、BK5、BK4、BK3、BK2的夹角与边长。
3.3 基准网数据平差处理
3.3.1基准网平差模型的特点与选择
监测基准网特点有:多余度观测、多测回观测、网形几何精度高、测量方法手段先进、人员操作要求高、系统误差对监测基准网成果影响小等。
本次边角组合网采用经典自由网平差,因在网形中只给定必要起算数据BK1和BK6。只有5个未知点,总观测测段数有16个。
3.3.2数据处理
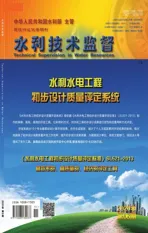
使用测量机器人配套的LGO多测回数据处理软件以及南方平差易软件,对数据进行平差计算,多测回观测成果见表1—2,平面点位误差见表3,平面点间误差见表4,数据成果见表5。
3.4 精度分析
对测量机器人多测回观测原始数据分析得:在多测回数据中,可以看出测回间和盘左盘右测角互差均小于1.8″,同样的方法若人工操作观测无法达到该精度。斜距观测中,测距精度优于0.5mm,该精度在这种气象复杂的观测条件下是相当有难度的。
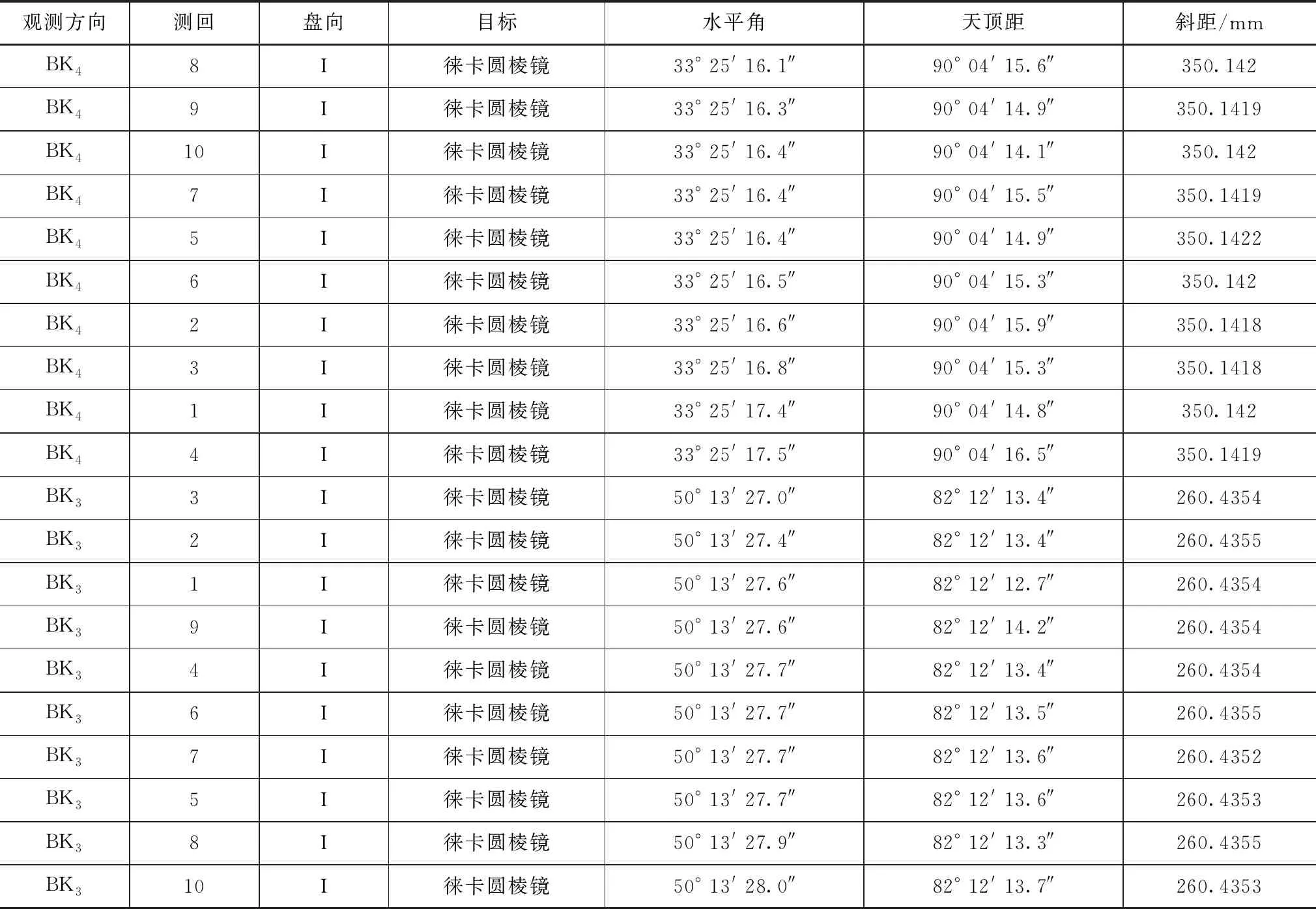
表1 多测回观测成果表(盘向I)
表2 多测回观测成果表(盘向II)

表3 平面点位误差表

表4 平面点间误差表

表5 数据成果表 单位:m
由原始观测数据可以得出本项目平均边长为303.8786m,最大边长为515.2820,最小边长为127.2787,测角中误差为1.2″,经平差计算后三角形最大闭合差为-1.7″,由平面点位误差表和平面点间误差表分析看出,最大点位误差为BK5的1.3mm,最小点位误差为BK7的0.5mm,边长点间相对中误差最优则达到了1/1038951,最弱边为最短边BK1-BK2边长点间相对中误差也达到了1/273517。与技术要求对比表明:精度远远优于3等边角网技术要求,且优于2等边角网技术要求。
4 结论
通过将测量机器人用于宝瓶河水电站大坝变形监测基准网建设可知,该设备性能优良,使用方便,ATR测角精度优于市场任何一款仪器设备,具有测距精度高、观测智能化程度高、测回间观测速度快的优势。从监测结果来看,成果可靠性高,精度有保障,为及时、准确、科学地分析和预报大坝的变形状况提供可靠的数据支撑,尤其适合于高山峡谷地段的大坝高精度基准网建设。