基于无线光通信智慧矿井研究现状
2020-12-10陈习锋丁举鹏张心云易芝玲
陈习锋,丁举鹏,张心云,郑 炅,易芝玲
(1. 新疆大学 信息科学与工程学院 信号检测与处理新疆维吾尔自治区重点实验室,乌鲁木齐 830046;2. 中国移动通信研究院 绿色通信研究中心,北京 100053)
0 引 言
据2018年世界能源年度报告,中国是世界上矿井煤炭最大的生产地和消耗地[1]。2017年,煤炭矿井资源生产了3.53亿吨,占世界煤炭生产的46%。然而根据不完全统计,自2020年上半年以来,中国仅煤矿事故就发生了48起,死亡人数高达74人[2]。因此,搭建一个智慧矿井平台非常重要,其能够有效保证矿工和矿物的生产安全。智慧矿井平台能够提供矿井通信,对矿工和采矿机器实时定位,并且环境监测传感系统能保证矿井作业安全。传统射频信号、第五代移动通信(5th Generation Mobile Networks, 5G)和无线光信号可用于矿井,协助实现智慧矿井平台的各类功能。
目前,矿井射频通信有透地通信、超带宽通信、射频识别(Radio Frequency Identification,RFID)、无线保真(Wireless Fidelity, WiFi)、蓝牙和紫峰(ZigBee)等[3-4]。传统射频信号带宽受限,而5G信号虽然为高带宽但矿井下电磁干扰严重。相比于射频信号,无线光可以免疫电磁干扰且高带宽,不需要频谱许可证。矿井下,通信场景可大致分为矿井巷道和矿井工作面两种[5]。无线光在室内小区分布和光束指向等的研究日益增多,而矿井下同样可利用现有室内无线光技术研究加以利用[6-8]。
本文首先综述了无线光技术在矿井的应用,然后分别从通信、定位和传感3个方面介绍了无线光在矿井中的应用,最后对无线光技术在矿井的应用进行了展望。
1 矿井空间无线光通信传播特性
矿井通信可分为矿井上和矿井下通信,矿井上通信为露天矿井覆盖通信,矿井下通信为地下矿井覆盖通信。露天矿井通信可利用5G信号覆盖,5G信号频谱效率高且传输距离远。700 MHz和2.6 GHz带宽的小型通信小区就可覆盖露天铁矿,可对通信质量进行测量[9]。文献[9]的露天矿井通信测量研究分别对路径损耗系数、阴影衰落标准差和自相关距离进行实验测量,为以后实验提供了数据支持。矿井下环境不同于普通室内环境,矿壁面粗糙,电磁干扰和多径效应严重,5G信号通信会受到影响。巷道里矿工间可建立无线光视距(Line-of-Sight,LOS)通信,而矿井工作面中无线光通信时,矿灯和矿工还存在非视距(Non-line-of-sight,NLOS)通信,如图1所示[10-12]。正常矿井作业下,采矿和运输矿物会带来附加因素如粉尘、水蒸气和易爆炸气体等,矿井无线光通信时会受这些因素干扰,同时采矿机器的运转和矿工的移动也会对通信造成影响。由于无线光的LOS传播特性,无线光通信下采矿机器和矿工的遮挡形成了阴影效应。而无线光通信信道中的各类物质会对无线光信号产生衰减。矿井下照明设施通常为发光二极管(Light Emitting Diode, LED),且为防爆灯,这样避免了矿井下发生安全事故损害设备照明,同时还为无线光通信提供了物质基础。

图1 矿井下无线光通信
1.1 矿井空间无线光通信信道
矿井下,无线光通信可对矿工实现必要对话通信和实时定位信息传递。矿井无线光通信可借助于矿工安全帽的照明灯,完成矿工与矿井通信网络的信息交互。图1所示为矿井下无线光LOS和NLOS通信。LOS通信存在于矿工间和矿灯与矿工间通信,而NLOS通信存在于矿灯发射的无线光束被矿壁面和采矿机器衍射后,被矿工安全帽中无线光通信装置接收的通信链路[11-12]。无论矿井巷道还是工作面上,无线光通信信号不断受到矿井空间物质衰减影响。因此,在矿井无线光通信中提前评估信道模型可保证无线光通信质量。在此基础上,一个矿井无线光路损通信模型被提出,该模型不仅考虑了LOS和NLOS通信,而且考虑了不同无线光收发器数量下的通信[13]。仿真数据结果表明,NLOS通信的路损指数都大于LOS通信。
1.2 矿井空间无线光通信阴影效应
矿井下空间昏暗,光源通常安装在矿井天花板或矿壁上。同时为保证一定照明,光源安装高度通常高于人的高度。矿井光源被认为是一个发光点,矿工或采矿机器可看作一个圆柱体。矿井无线光通信时,由于光束LOS传播特性,光源发出两束光束线相切于圆柱体边线,会在圆柱体后方形成一个阴影区域。在该区域内,无线光无法覆盖矿井通信,后方矿工或采矿机器无法接收到无线光信号。室内场景下,同一光源下不同位置的人在光源覆盖下会形成不同大小的阴影区域,如图2(a)所示[14]。矿井下作业在狭窄区域,无线光通信时阴影效应更加明显。阴影区域下的矿工无法进行通信,也无法实时传递位置信息。为计算无线光阴影效应形成的阴影区域,一个阴影计算方案被提出[14]。该方案将光束与圆柱体两条切线连接形成的区域通过光源与圆柱中心连线划分为两部分区域。不同区域下无线光功率衰减不同,矿井下无线光通信可通过此方法实现合理划分光源分布,最大化减少阴影效应,从而在矿井无线光通信时降低阴影效应影响。相似地,多个光源下会形成多个阴影区域,如图2(b)[15]所示。

图2 无线光阴影效应
矿井下,照明光源排列紧密以确保矿灯下的阴影区域重叠。因此优化无线光通信阴影效应非常必要,矿井通信质量也能得到保证。矿井下无线光通信考虑阴影效应,同样可简化通信模型将人作为一个圆柱体。圆柱体的两侧边缘使得无线光光束衍射,该衍射效应为双峰高斯效应[11]。
2 矿井空间无线光通信方案
5G技术快速发展,智慧矿井应用随之发展迅速。中国移动山西公司、阳泉煤业集团和华为公司共同建设了井下5G基站,实现了矿井主巷道和运输巷道5G信号覆盖[16]。矿井下全球定位系统(Global Positioning System,GPS)信号无法覆盖,并且存在电磁和多径干扰,山西移动5G联创实验室自主创新研发了矿井专用天线,5G基站可覆盖矿井下400 m以上范围,且上行和下行速率分别可达800和70 Mbit/s。上述5G智能通信系统可满足矿工通信。智慧矿井平台还包括智能远程遥控和智能开采等技术。山东黄金矿业(莱西)公司、中国移动公司和华为公司共同建设了5G无人化智慧矿井,实现了矿井下5G+无人驾驶[17];莱西公司实现了5G基站网络与无人驾驶电机车运输系统网络对接,5G基站可覆盖500 m矿井范围,下行和上行速率分别可达800和100 Mbit/s。
矿井环境特殊,巷道复杂多变,尤其当矿井事故发生后,矿井结构并不能保持原状。这时,原有通信链路会遭到破坏,不仅事故区域通信会中断,下方区域同样可能无法建立连接,更无法监测矿井下具体情况,地面救援部队无法展开有效救援。矿井结构复杂,传统射频通信信号因持续衰减而无法到达接收端,而无线光通信同样会面临衰减问题,因此中继方案可应用到矿井无线光通信中。该方案可实现矿井下长距离通信,将矿井下信息传递到地面。
无线光中继技术能够优化因通信场景复杂而导致信号衰减的问题,无线光信号更是适用于矿井危险场景下通信。如图3所示,一个矿井多波长无线光中继通信方案被提出,其可实现矿井下紧急通信[18]。如图所示,矿井下分布有红外光、紫外光和中继通信设备,矿井地面上有指挥调度设备,它们之间采用无线光进行通信。该方案中采用两种无线光:红外光和紫外光。在矿井巷道干路,红外光实现信息短距离传输;紫外光实现远距离传输。矿井中继端接收红外光信号并发射紫外光信号实现中继。中继端通过无线光中继转发,将矿井巷道和工作面相关信息回传到地面设备。为避免更高的通信成本,可将射频信号和无线光以混合方式形成混合通信系统,实现矿井下通信。

图3 矿井多波长无线光中继通信方案
图4所示为一种矿井无线光混合中继通信方案,矿井隧道同样可以采用该通信方案实现地面-矿井通信[19]。无线光信号用于传递矿井电力网络波动信息,射频信号用于将监测信息传递到地表甚至卫星。相位测量单元(Phase Measuring Unit,PMU)用于测量电力网络振荡引起的电相位变化,以提升电能系统(Electric Power System,EPS)的可观测性。同时,还为PMU提供协调世界时(Coordinated Universal Time, UTC),利用矿灯位置信息提供定位信息。而超小孔径终端(Very Small Aperture Terminal, VSAT)用来防止地震等摧毁通信设备而无法传输信号。这一通信方案中,无线光下行信号将位置和UTC信息传递给PMU装置,射频上行信号将监测和位置信息传递给VSAT装置。由于无线光耗能低、带宽高且具有指向性,所以无线光通信技术可应用于矿井无人机通信[20]。
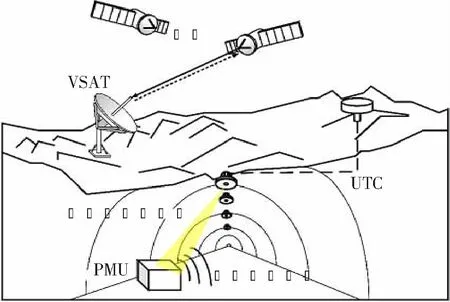
图4 矿井无线光混合中继通信方案
发生灾难时,通常是机器人取代人员进行救援。当矿井发生塌方凹陷机器人无法通过区域时,无法获得矿井下信息。而且长距离通信,控制信号无法准确到达机器人实现精准控制。矿井无人机无线光通信可较好地处理上述问题,现有难点为需考虑续航、定位精准度和高速率数据传输等问题[21]。
3 矿井空间无线光定位
GPS信号无法穿透矿井地下区域实现定位,基于RFID和ZigBee等射频信号的定位技术易受到电磁干扰而无法实现精准定位,而且这些射频通信设备易遭受矿井环境腐蚀如高温和水蒸气等。矿井下现存的灯具,包括矿壁灯和矿工安全帽灯等,可为无线光通信提供基础设备。这些设备耐腐蚀和低耗,且矿灯位置通常固定,因此可通过矿灯已知位置计算出矿工位置。同样地,矿井无线光定位设备也需要合理安放在矿井弯曲复杂环境中。
矿井地下结构错综复杂,且随着矿物不断开采,矿井结构也相继发生变化。尤其在发生矿井事故时,矿井结构发生变化更是无法对矿工实现定位救援。因此,矿井隧道建模非常有必要。三维激光扫描系统可用于进行轨道隧道结构建模,其同样适用于矿井隧道建模[22]。这一扫描系统主要由圆形激光器和摄像机组成,其通过对隧道表面进行扫描来获取数学结构。通过获取的数学模型可检测出隧道变形区域,同时实现了矿井隧道安全检测。而根据该模型可详细绘制出整个矿井隧道结构图,为矿工和采矿机器提供定位依据。但因矿井环境特殊,需考虑激光扫描安全问题,防止矿井安全事故发生。
矿灯通常为LED照明设备,具有寿命高、能效高和电压低等特点,因此非常适合作为矿井无线光通信设备。矿灯位置固定,因此位置信息可提供给矿工或矿车,作为计算自身位置的参考信息。矿井下精准定位为研究难点,基于矿灯的三边测量无线光定位方案被提出[23]。如图5(a)所示,根据三边测量方法可实现矿工和矿车的定位。该方案根据3个矿灯的位置信息计算出矿工和矿车位置。矿灯位置信息通过无线光发送到矿工和矿车接收装置,并且将自身位置反馈给矿灯上的接收装置,实现矿井下的定位功能。 但矿井下,矿灯排列需要满足照明需求,不可全部按照三角排列方式安放矿灯,因此该方案适用范围较小。小区识别号(Identity Document,ID)技术常用于定位系统,但通信小区的大小和密度会影响定位精准度。矿井定位小区ID方法同样可用于无线光中,同样需要考虑精准度问题。一个基于小区ID自适应无线光定位方法被应用于矿井,通过控制LED发送自身位置实现定位,如图5(b)所示[24]。该定位方法同时考虑了通信小区有和无重叠覆盖两种情况,并可计算两种情况的最大计算误差。矿井矿灯光束覆盖为无重叠覆盖情况下,矿车等定位可采用低精度定位方式,通信小区定位信息覆盖可按间隔方式发送,其他LED仅为照明功能。矿工等定位为高精度定位,全部LED发送定位信息且控制通信小区重叠区域,实现更加精准定位。基于矿井无线光三边测量定位方法,一种无线光三维三边测量矿井定位系统被提出[25]。该系统网络由3层组成:接入层、分布层和核心网络层,定位监控中心位于核心网络层。此矿井无线光定位系统可计算出矿井光源和接收端距离,实现矿井下无线光三维定位。矿工实时定位能保证矿工安全,矿井无线光定位还需要考虑其他光源干扰和精确度等问题。因为实际矿井环境更加复杂,华策光通信公司进行了工业井下巷道无线光人员定位系统测试[26]。该无线光定位系统将无线光通信装置与矿灯结合,实现了矿井人员的定位。将矿井下的巷道灯位置信息作为定位坐标,矿工佩戴的无线光矿灯为接收和反馈坐标消息装置。该无线光定位系统下,定位精度可达10 m,且可通过矿井下光纤网络将定位信息传递至地面矿井信息管理分析系统。

图5 矿井无线光定位
4 矿井空间无线光传感
地下矿井巷道总长可达几千米,为了方便煤矿的开采和运输,矿井巷道呈树状交叉分散在地下。然而矿井环境为高危场所,矿物开采会带来一系列不可估量的危险。矿物挖掘常伴随气体和粉尘等物质产生。矿井开采气体泄露,包括无毒易爆气体、剧毒气体和水蒸气等其他杂质,矿物粉尘更是会遍布矿井。并且矿井为封闭空间,高压高温环境更是对矿工和采矿机器的安全损害严重。因此,监控矿井环境信息非常重要,同时还要将这些信息传递到地面监控中心。但这些矿井监控信息的传感,需要面对矿井复杂环境下传感和通信这两个共同难点。
4.1 矿井空间射频传感
传统矿井传感技术可利用RFID、蓝牙和ZigBee通信传递传感节点信息。射频传感技术具有快速安装、自组织和动态协议等优点,并且无线传感节点很小,容易安装在矿井中[27-28]。矿井无线传感技术使得矿工安全和采矿产量进一步得到保证,其虽可应用于矿井,但也存在许多缺陷。首先要考虑传感节点的安全问题,高温高压和水蒸气容易对节点传感器造成腐蚀。同时需要考虑供能问题,以实现矿井安全的长时间监控。而且射频信号衰减严重,无法实现长距离信息传递,矿井传感信息无法传递到地面。虽然无线传感的组网方式可实现长距离传输,但组网方式存在系统延迟严重和动态协议选择等问题,并且在矿难事故发生后,传感节点被破坏,监控信息无法传递到地面监控中心。矿井巷道不规则,传感节点分布同样需要进行设计才能合理监控。
面对传统射频传感技术存在的延迟高和通信速率低等问题,一种矿井5G网络架构被提出[29]。该矿井5G网络基于非独立组网方式构成,可结合矿井4G网络实现语音、调度、巡检机器人、环境监测传感、虚拟现实/增强现实和无人车辆驾驶等智能应用。并探讨了矿井5G网络下的3种组网方式,包括光纤直连、无源波分复用和有源光传送网方案。基于5G环境监测网络,可实现高清视频监控。
4.2 矿井空间无线光传感
无线传感节点通常需要固定,易受矿井环境结构变化影响。而射频信号在矿井下存在带宽不足和衰减严重等问题,可与无线光技术结合实现传感信息监控。一个基于光决策机制的人类安全管理算法被提出,可利用传感器传感信息监控和预测矿井下安全[4]。采矿作业时,无线光信号传递多个传感器监控信息至远程控制中心。该算法在采矿过程中根据传感器回传信息通过云计算评估矿井安全情况。但这类无线光传感方法只可测量某固定区域状态,当这一传感节点损耗就无法继续监控传感。因此,可将机器人与无线光传感技术结合,实现移动巡检监测传感矿井安全信息。
为实现矿井下传感信息的移动监测,一种与RFID和无线光测距技术结合的矿井机器人被应用于矿井下[30],该机器人搭载个人电脑(Person Computer, PC)终端记录传感测距数据。如图6(a)所示,RFID实现传感节点识别,无线光测距技术实现精准定位。机器人还可搭载其他传感器,实现多传感信息监控,如温度、压强和气体等。矿井环境复杂多变,不仅会出现凹凸不平地面,而且涌水时会出现水坑,传统机器人无法通过涉水区域。一种水陆两用传感机器人被应用于矿井下实现传感信息的监控和之后的信息地面传递,如图6(b)[31]所示。该机器人可实现事故区域探测,避免救援人员受到伤害。

图6 矿井传感[30-31]
5 智慧矿井无线光技术挑战与展望
矿井矿物通常处于地底深处,为保证矿工正常工作环境,照明设施需排列紧密提供照明强度。但无线光提供覆盖通信时必需考虑干扰问题。不同通信小区间的干扰导致通信质量太差,无法保证基本通信。因此,可借鉴5G通信多天线设计,天线具有指向性。矿井照明灯具中LED子阵列光束具有指向性,使得通信小区呈现蜂窝式覆盖。相邻通信小区为规律分布,指向光束仅覆盖固定区域,而不像传统朗伯光束向下覆盖时存在边缘弱和干扰等问题。
矿物开采和运输到地面时,粉尘漂浮在空气中,不仅危害了矿工和机器安全,而且无线光在提供通信时,粉尘容易附着在灯具表面。随着时间加长,粉尘容易遮挡住光束发散,光束光功率大幅度衰减。可采用大功率LED应对衰减问题,但此时需考虑供能和安全问题。因不同波长的光束衰减不同,可采用红、绿和蓝3色光进行通信覆盖。
矿井巷道歪曲复杂,而无线光存在LOS传播特性。采用紫外光作为中继方式时,首先由于多径效应信号衰减严重,再还需考虑灯光对人眼的伤害。为应对巷道口信号中转问题,可利用逆反射器技术对无线光信号进行中继传输。巷道深处安放逆反射器,交叉路口的中继站将不含信息的无线光发射到逆反射器上。逆反射器装置将需传递的信息如位置信息等加载到接收光束上,再通过逆反射器将光束反射回中继站,实现矿井通信中继。
矿车发生的安全事故也不少见,如何实现矿车实时定位和防碰撞极为重要。因矿灯的位置是固定在矿井壁上的,因此可通过矿井无线光技术实现定位。矿车上可同时安装无线光发射接收装置接收矿灯发射无线光的位置信息,并通过接收功率计算出自身位置,然后将自身位置信息发送给安装在矿壁上的接收装置,向地面传递矿车位置信息。同样地,前后矿车可通过安装无线光通信装置实现矿车间通信,根据位置信息判断安全距离,实现防碰撞功能。
