轨道交通移动装备数字仿真平台设计研究
2020-12-08冯瑞龙赵俊华
王 翔,周 超,冯瑞龙,赵俊华
(1. 北京经纬信息技术有限公司,北京 100081;2. 中国铁道科学研究院集团有限公司 电子计算技术研究所,北京 100081)
轨道交通移动装备是集多学科协同、集成、优化的高新产品。目前,在移动装备的产品设计开发过程中仍存在多类问题:(1)确定部件级模型的关联模型;(2)复杂系统仿真计算方法;(3)整体设计流程化、标准化;(4)多学科总体优化设计。随着虚拟样机技术以及仿真测试的发展,基于复杂系统下的多学科集成仿真平台为轨道交通移动装备的新一轮设计开发带来了机遇。
轨道交通移动装备动力学性能分析以及牵引控制系统优化设计是移动装备总体设计中必不可少的环节[1]。在列车实际运行过程中,空气动力学性能、系统动力学性能和牵引控制系统3 者亦是相互影响,存在一系列耦合作用,传统的单一学科数字仿真方法已经无法满足移动装备关键技术的攻关及验证。本文通过对轨道交通移动装备动力学、牵引控制系统计算模型的研究建立了学科交互的逻辑关系,并创建能够描述系统过程的关联模型作为联合仿真的理论依据;通过整体架构设计、子模块定制、系统无缝集成和轻量化储存的技术搭建联合仿真平台,所建平台不仅具备复杂学科联合分析的功能,亦可指导新产品的开发、推进现有产品的改进,为产品全生命周期提供数据支撑[2]。
1 联合仿真算法研究
1.1 轨道交通移动装备流—固联合仿真研究
轨道交通移动装备空气动力学以及系统动力学性能分析是装备设计研发过程中的重要组成,从实际运行的角度来说,两者相互关联。目前,对于两者的耦合作用分析采用离线仿真的方法,通过对环境下气动载荷的计算,以固定值加载的方式对移动装备系统动力学性能进行分析评价。该方法忽略了装备运行的实时性和同步性,无法反映出实质状态[3]。
为节省计算资源且保证2 种求解器中的数据交互,本文通过耦合迭代的计算方法实现两者的联合仿真,利用嵌入式技术将移动装备系统动力学计算程序和空气动力学计算程序结合,采用线性插值的方式保证计算迭代的连续性,从而实现了联合仿真的实时一致性,具体流程,如下图1 所示。

图1 流-固耦合仿真流程
为解决迭代过程中的计算发散问题,本文利用线性插值的方法提供,以避免迭代过程中相邻时间段气动载荷的激变。t时刻气动载荷F修正计算公式如下:

式中,Fn为t时刻的气动载荷;Fn−1为tn−1时刻的气动载荷。
轨道交通移动装备流−固联合仿真计算方法由最初稳定流场作为迭代计算的起始网格,根据每个迭代步中边界条件的变化情况自动完成网格更新,每次计算过程中的气动载荷实时提供给系统动力学计算程序完成动力学性能的分析(具体表现为移动装备的运行姿态),随即反馈给空气动力学计算程序完成迭代计算过程[4]。
1.2 轨道交通移动装备系统动力学—运行控制联合仿真研究
轨道交通移动装备的运行控制主要表现为牵引、惰行和制动3 种方式,本文利用系统动力学软件Simpack 及控制类软件Simulink 联合仿真,进行轨道交通不同运行控制下的建模与运行能力分析。
Simpack 软件Wheel/Rail 模块主要通过整体模型建立,轮轨接触参数设置,子结构约束设定以及轨道谱选取的方式进行移动装备动力学性能分析及评价[5],所建立的移动装备系统动力学模型以函数形式输出至Simulink 中,通过Simulink 自带SIMAT 接口实现数据交互,从而实现联合仿真,具体流程如下:
(1)轨道交通移动装备系统动力学模型。依据车型信息建立轮对、转向架、车体和悬挂系统等机械结构,通过铰链建立关联,设定约束以及作用载荷。
(2)系统动力学模型的输入与输出。SIMAT 接口作为两类仿真数据交互的媒介,其优点是接口高效且能实时提供所有的几何数据。系统动力学模型的输出是指其对控制系统的变量传输,输入则是控制系统对于动力学参数输入的反馈,两者形成闭环。
(3)控制系统模型。在Matlab 中创建控制系统结构框图,既描述系统过程的传递函数模型,在已建立的输入输出信息封闭循环中用数据驱动建模实现与系统动力学模型的信息传递。
(4)采用交互的方式实现轨道交通移动装备动力学−运动控制系统联合仿真。
1.3 轨道交通移动装备空气动力学—运行控制联合仿真研究
轨道交通移动装备空气动力学−运行控制联合仿真主要研究对象为磁悬浮、真空管道载运工具等新型轨道交通移动装备,用于处理移动装备运动行为与气动载荷之间耦合问题。轨道交通移动装备空气动力学−运行控制联合仿真方法,如图2 所示。
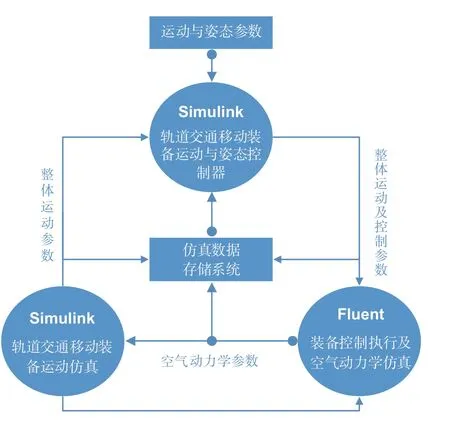
图2 轨道交通移动装备空气动力学−运行控制联合仿真方法
运行控制器发出指令,将当前移动装备的运行控制和状态信息传递给执行器,由Fluent 软件求解器作为Simulink 的计算引擎,实时提供联合仿真所需要的空气动力学参数;Simulink 接受气动参数信息,求解下一时刻移动装备的运动参数及动力系统的控制参数并反馈给控制器;再由控制器输入至Fluent中实现闭环[6]。
轨道交通移动装备空气动力学−运行控制联合仿真是对移动装备实时运动行为的分析,由基于动网格技术的仿真方法提供各时间节点的瞬时边界条件以及力学参数,联合实现依赖于Simulink 与Fluent两种不同仿真环境下的数据交互,因此需要一种监测程序实现并行,该程序的主要作用便是共享信息创建以及仿真进程管理。联合仿真指令下达后,该监测程序启动Simulink 与Fluent 软件并以共享文件的形式为两类仿真环境提供实时数据的更新与传递;Simulink 与Fluent 软件分别以M 函数以及Userdefined Adjust UDF 的形式对监测程序的共享信息进行访问与提取[7]。
2 轨道交通数字仿真平台总体设计方案
2.1 需求分析
轨道交通移动装备多学科数字仿真平台是多学科仿真的分析系统,集仿真数据、资源调度和人员权限的管理平台,具备子系统拓展、知识沉淀和项目管理等扩展功能[8]。
所建平台应具备Web 化、模块化、高安全性和开放性特点,包含平台门户,分析子系统以及仿真数据管理子系统。平台门户提供集中的操作维护界面,开放性设计体现在提供开放的集成接口,支持第三方系统集成。分析子系统覆盖移动交通装备分析设计的常用学科仿真计算,各学科针对具体分析场景包含并拓展对应的仿真模板,模板有若干个功能模块组成。仿真数据管理子系统管理仿真前后处理的数据,如列车模型、计算简报和结果文件等各类型的异构数据。
2.2 架构设计
数字仿真平台是面向工程专业领域、工程数据、人员、工具、知识、项目及流程的系统化集成管理系统[9],本文基于BS/CS 混合架构搭建仿真平台,以Client 形式实现多学科联合仿真,分别从用户层、业务层、应用层、基础层4 个层面完成整体架构设计,如图3 所示。
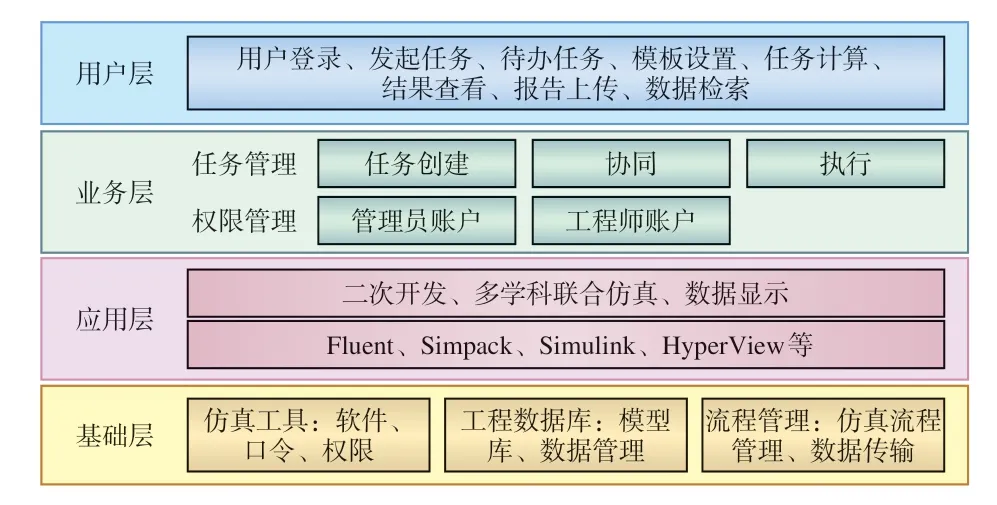
图3 轨道交通移动装备数字仿真平台整体架构
仿真项目与项目管理的结合可以对仿真任务进行管理,实现任务的分配,计划任务节点的控制,以及用户权限等管理功能。授权用户在仿真平台的工作流,即业务层与应用层对应关系。如图4 所示,针对不同仿真任务,仿真平台按照流程模板选择几何/有限元模型,以及输入载荷和边界条件等信息,完成任务并自动生成计算报告。任务结束后,过程、结果数据保存到工程数据库中,可实现平台调阅和各类数据检索。
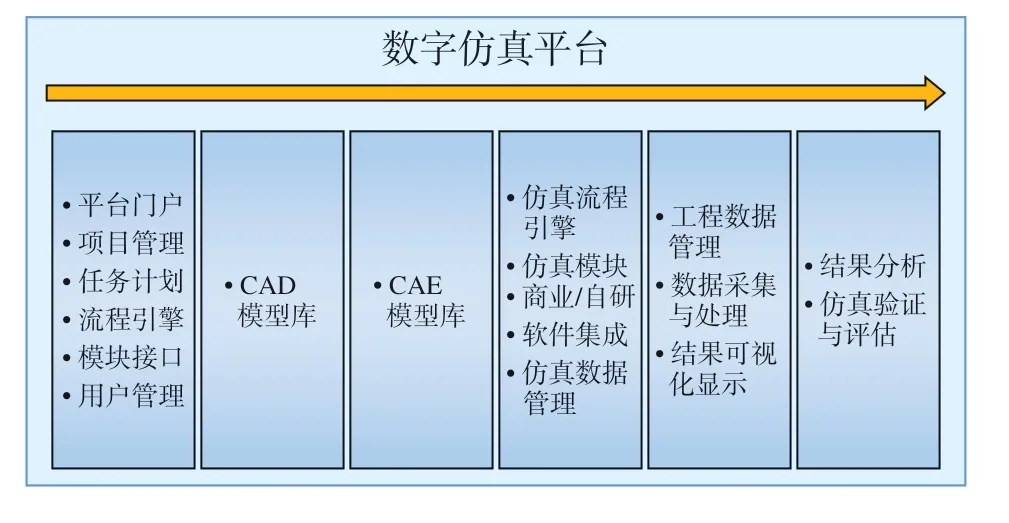
图4 业务流程与应用层顺序关系
2.3 功能设计
仿真平台功能设计包括系统基础框架、仿真流程管理、数据库、仿真及后处理5 大功能模块,如图5 所示。
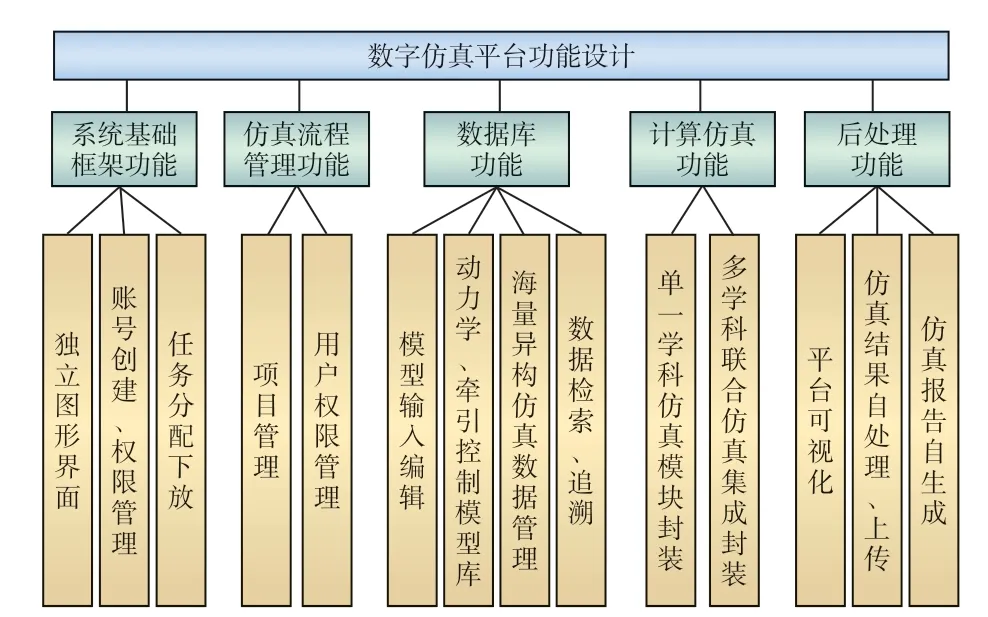
图5 仿真平台功能设计
(1)系统基础框架功能。平台具备独立的图形界面、账号创建、权限管理功能。不同权限的工程师可根据分配的任务在平台上进行专业分析等应用。
(2)仿真流程管理功能。平台具备项目管理功能,对各种仿真任务进行管理,实现任务的分配,工程数据的显示,计划任务节点的控制,以及用户权限等管理功能。
(3)数据库功能。平台具备轨道交通移动装备动力学和控制系统模型库,可实现模型的导入和编辑功能;数据库具备计算仿真文件存储功能,包括计算文件、简报、载荷等信息,并可实时数据检索调阅。
(4)计算仿真功能。基于给出的Fluent 计算软件、Simpack 软件以及Simulink 计算软件对空气动力学模块,系统动力学模块,运行控制模块3 大子系统进行封装,并实现多学科分析软件的集成和封装管理。
(5)后处理功能。实现平台可视化,设计过程中生成的CAD/CAE 文件能够轻量化地上传,对各类数据直接进行图形浏览。
3 轨道交通移动装备仿真数据管理系统
为实现轨道交通移动装备的设计流程与仿真流程的有效融合以及海量仿真异构数据的管理,本文提出一种仿真数据管理系统以适应数字仿真平台流程化建设。
仿真数据管理系统具备仿真流程管理、仿真数据管理、仿真工具集成以及数据安全管理功能,用于管理仿真过程中产生的仿真流程数据、中间数据、模型数据、仿真数据和文档数据等,能够对海量异构的仿真数据进行集中、高效与统一的管理,实现数据的重用性和可追溯性,制定统一的数据标准与规范[10]。本文所建轨道交通移动装备仿真数据管理系统整体框架,如图6 所示。
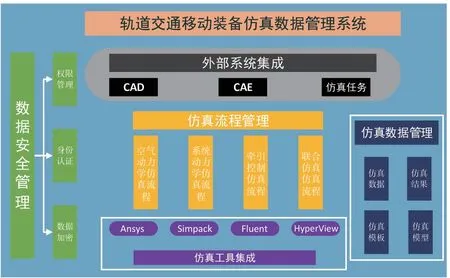
图6 轨道交通移动装备仿真数据管理系统整体框架
仿真数据管理系统采用面向服务的架构(SOA),独立于数字仿真平台,使得不同的功能单元利用通用的方式进行交互,其二次开发功能将数据库与各类仿真软件有效结合,从而实现从任务发起至任务完成的标准化。
3.1 仿真流程管理
为消除单一个体经验仿真带来的结果多样化且难以验证性,本文提出一种集单一学科仿真与多学科联合的仿真流程管理方法以实现仿真流程控制及优化。包含轨道交通移动装备空气动力学、系统动力学、牵引控制、联合仿真4 个仿真流程子模块,可实现仿真任务分配、人员协同、过程监控、规范执行和提升效率的功能。
3.2 仿真数据管理
仿真数据管理子模块以轻量化的方式对仿真过程中产生的异构数据进行存储及其它功能操作。异构数据包括仿真过程数据、仿真结果数据、仿真模型数据和仿真模板数据,该模块可实现多学科仿真数据的交互与传输,具备元数据管理、过程数据管理、高级数据检索、数据权限管理以及数据版本控制等功能,对于轨道交通移动装备仿真知识管理、多学科协同优化具有积极的作用。
3.3 数据安全管理
数据安全管理子模块具备权限管理、身份认证以及数据加密的功能。数字仿真平台提供的权限管理功能针对特定管理员及用户开放特定的数据,特定人员具备特定数据的功能性操作权限,并采用身份认证,数据加密的方式来保证仿真数据管理系统的安全性。
3.4 外部系统集成
外部系统集成子模块主要是为了实现仿真数据管理系统与外部系统的信息交互和传递,该模块具备CAD/CAE、另类学科仿真的外部接口,支持企业内部的定制与开发,并通过预留接口的方式实现整体数字仿真平台的二次开发及完善。
3.5 仿真工具集成
仿真工具集成子模块包含仿真数据集成、开发工具集成以及联合仿真集成,该模块针对定制的各类学科分析软件进行二次开发,平台用户可通过直接输入参数的方式获得计算结果,并可以实时调用过程文件,监控仿真过程。
4 结束语
本文基于多学科内在交互耦合关系提出了轨道交通空气动力学−系统动力学、运行控制−系统动力学和运行控制−系统动力学联合仿真计算方法,实现了实时仿真的流程化,为轨道交通移动装备的设计与研发提供参考;从多学科耦合、平台集成、仿真数据管理3 个方面完成轨道交通移动装备数字仿真平台整体框架构建以及功能设计,所建数字仿真平台有效解决了现如今多学科总体设计难以协同、动态实时交互困难、流程管理闭环难以共享等问题。