基于薄膜压力传感器的矫形鞋垫个性化定制方法
2020-12-08赵轶钦赵翠莲
赵轶钦,赵翠莲,王 凯
(1.上海大学 机电工程与自动化学院 上海智能制造与机器人重点实验室,上海 200444; 2.上海市第四康复医院,上海 200040)
0 引言
脚是人体的重要运动器官,承载了人体的重量,维持着人的行走。老年人在脑卒中发生后常伴有不同程度的偏瘫[1],引起步态异常,长期的步态异常会引发各种足部问题,如关节炎、膝盖骨磨损、姆趾外翻等等。这些问题不仅限于脑卒中患者,也有一部分是遗传引起的,或者后天长期行走施力不当所导致。足底压力是指在运动中,脚与支撑面之间的压力场[2]。足底压力数据的分析对步态与姿态的研究具有十分重要的意义,其中足底压力中心(Center Of Pressure, COP)反映了足底压力的总体情况,可作为特征进行足底问题的诊断,通过数据的分析还可以作为足底矫形的依据。正常足的足底压力中心曲线应始于足跟,经由足中偏向内侧发展最后拐向拇指止于拇指第二节趾骨附近[3]。
矫形鞋垫作为一种康复辅具能够帮助人们更好地运动,它通过生物力学的原理设计,可以减少足底局部集中力,减轻疼痛,增强足运动稳定性,被运用于下肢疾病的治疗。有研究表明,矫形鞋垫对预防及矫治膝关节炎、腰部疼痛及足部畸形,改善其临床症状等有一定效果[4-6]。现有的制作方式主要依靠医生的经验,通过脚底的受力分布数据和脚底几何形状模型进行制作[7]。脚底的受力分布主要是通过平板测力装置进行测量,如美国的F-scan系统、德国的NovelPedar-X系统等等,其精确度较高,但是便携性较差,还有使用六轴传感器或者在脚底布置一些压力传感器的测量方法。脚底几何模型的获取主要是通过手持的激光扫描仪进行获取,具有成像精确,速度快等优点。矫形鞋垫可通过软件的帮助进行快速的设计,如英国的Orthomodel和德国的PedCad,但是使用这些软件需要有相关领域知识和经验的医生去操作,过程复杂且无法给出一个量化的指导性建议[8]。
因此本文依据定制-模制型矫形鞋垫[9]制作方式提出一种个性化的矫形鞋垫定制方式,该方法分为3个步骤:足底压力检测、矫形鞋垫定制、矫形效果验证。其中检测装置采用便于携带的穿戴式设计,受试者可在定制矫形鞋垫前后穿上,自由行走不受场地限制。通过获取穿戴过程中患者的足底压力数据,真实反映行走过程中足底压力,依据压力中心轨迹的位置与压力大小计算矫形鞋垫局部加厚厚度,结合3D打印技术快速化定制矫形鞋垫,二次检测验证其穿戴后压力中心曲线以达到满意的矫正效果。
1 足底压力检测装置
根据足部的生理特征与承重特性,人体足底压力区域可划分为以下5个部分,如图1(a),即脚后跟内侧(M1)、脚后跟外侧(M2)、脚弓内侧(M3)、脚弓外侧(M4)、趾骨与脚趾(M5)。
足底压力传感器的分布方式有全局的阵列式分布[10]和依据足底解剖学的特征点排布[11]两种。Tekscan公司的F-Scan系统以压力传感器数量多的优势可以全局测量脚底压力的分布情况,大量的数据显示,足底压力特征信息主要分布在脚后跟、脚前掌和脚趾三部分,其中脚趾区域集中力主要位于大拇趾[12]。因此本装置所采集的五点压力选取位置分别为足跟左、足跟右、籽骨、小趾第一节趾骨和拇指第二节趾骨,其中足跟左侧点具体位置为足跟中心点向左侧偏离中心一厘米处,同理足跟右为右侧偏离中心一厘米位置,如图1(b)所示。
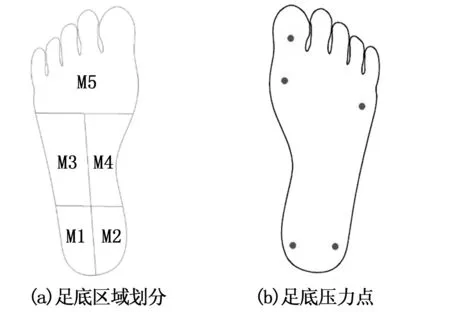
图1 足部示意图
自制的五点足底压力采集装置由薄膜式压力传感器、STM32系统、AD模块、放大模块、储存模块和电源模块组成,如图2所示。压力传感器采用Flexiforce,型号为A201,其量程范围为0~100 lbs。经过详细设计与制作后,原理装置穿戴效果如图3所示。
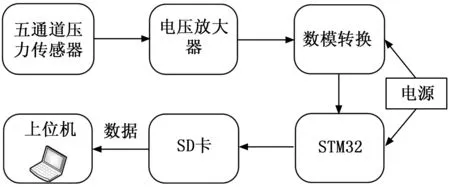
图2 装置结构
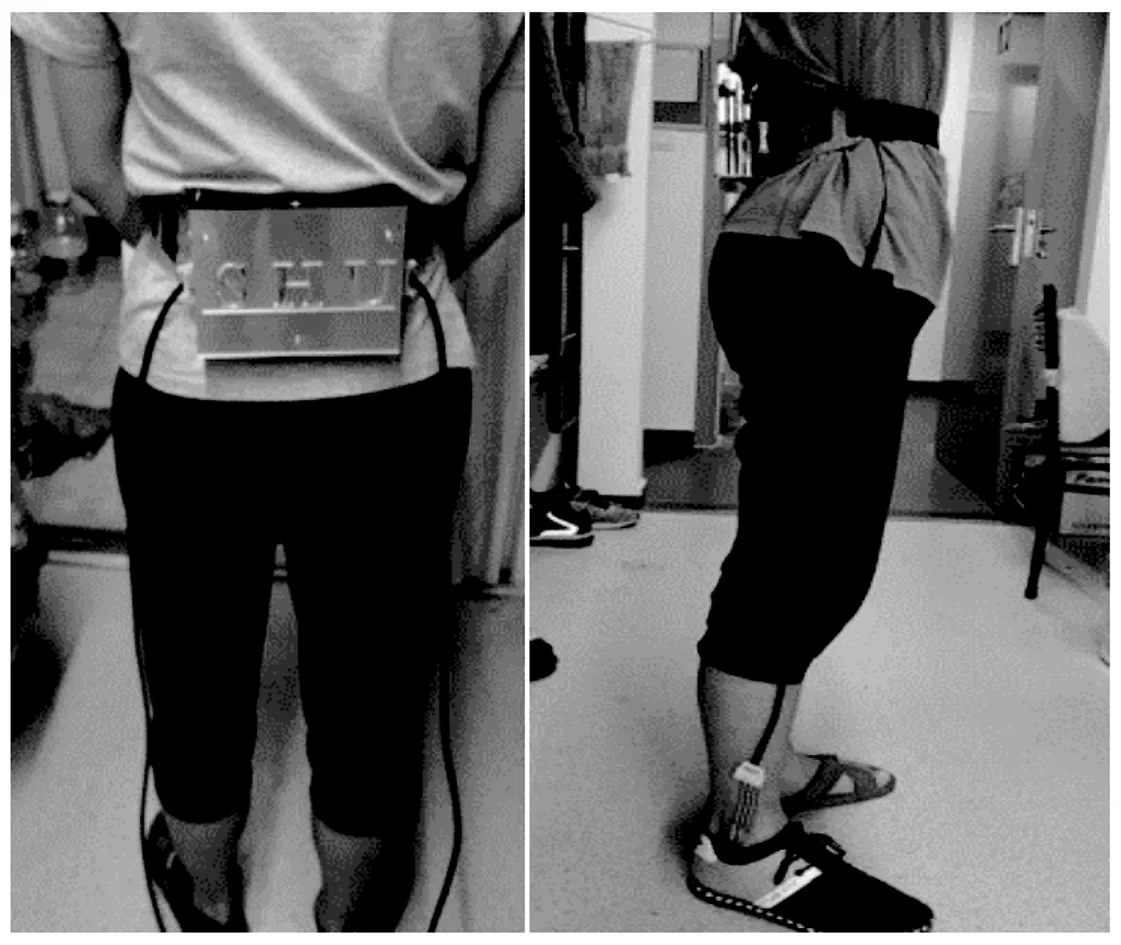
图3 装置穿戴示意图
该装置可以采集到患者行走过程中五点的压力数值,通过对数据的分析可以得到患者的步态数据。同时基于Matlab-GUI(graphical user interface)开发了可对足底压力进行分析的上位机程序,实现了足底压力分析的基本功能,如图4为上位机启动界面,能够记录患者个人信息,导入患者足底压力数据,步态信息分析功能包括足底压力中心轨迹、左右脚平衡对比、步相分布等。
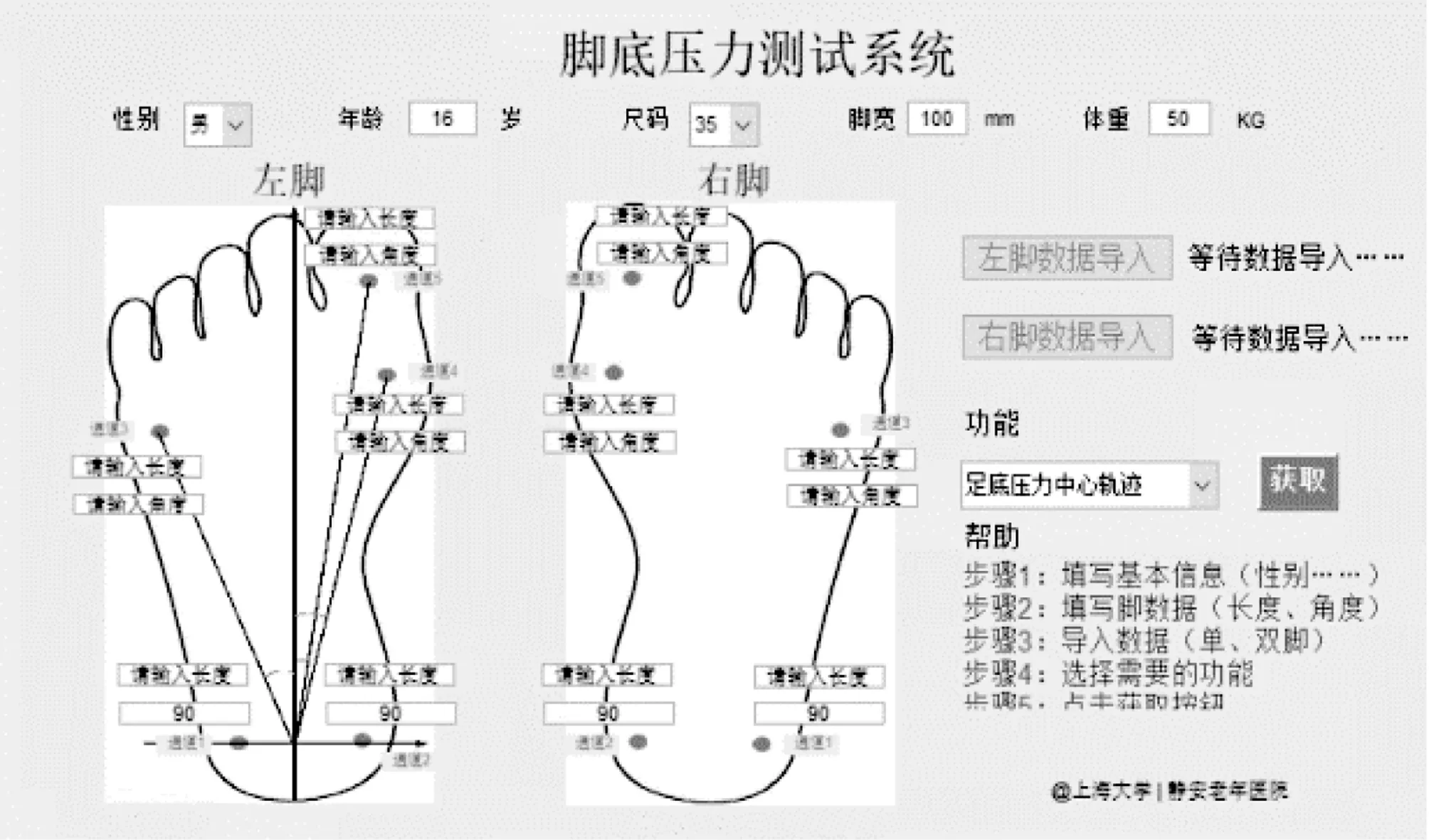
图4 上位机启动界面
2 足底压力中心曲线计算方法
1) 滤波:
由于模拟电路中存在一些噪声,并且行走过程中排线的位移也会形成一些随机噪声。考虑到下位机计算能力有限,并且本系统非实时性系统,故将滤波环节设计在上位机中。
滤波算法采用均值滤波,可以有效抑制噪声,平滑曲线,对后面的计算有益。其均值滤波公式如下,
(1)
其中:yi为滤波值,xi为原始值,n为滤波长度。
通过滤波算法后消除了数据中因人体摆动所引起线材抖动带来的尖刺噪声,提升了数据的准确性。
(2) 起终点判断:
采集穿戴过程中患者的一次足底压力数据大约需要5~10分钟,设备的采样频率为100赫兹,经过采集会生成几万条数据。在这些数据中存在大量无效数据,例如人体在未行走状态时,压力传感器获取的信息为站立状态的压力值,还有足在摆动相时,足底与地面无接触,此时压力值几乎为零。而足底压力中心曲线是计算每一步从接触地面开始到抬起结束过程中压力中心的转移,因此需要对数据做提取,剔除步与步之间多余的数据,最后取出每一步的起点与终点所对应的时间节点。
由于步相的变化是连续的,但是通过五点压力传感器所反馈出的数据不具备连续性,各压力点之间无联系,独立工作采集数据。因此首先将通道1~5的压力数据进行叠加,得到总的压力数据F,该离散的压力数据可近似认为是符合步相变化的。F值的大小从近似无压力到有压力可认为是单步的开始,从有压力到近似无压力可认为是单步的结束。为了检测数据中这样的起点与终点,将F以0.01 N为分度进行等分,得到取值范围区间集合I[0,max(F)],并计算与之匹配的概率密度函数f(x) ,最后统计出概率密度最大值在集合I[0,max(F)]所对应的压力值,即Fmax(f)。
通过设定比例阈值σI进行筛选,筛选规则如下公式:
Fi≥Fmax(f)·σI
(2)
其中:Fi为F在任意时间节点的压力值,经过筛选后得出若干段有效数据集合Qi,每一段集合的时间区间长度Li需要满足σL1≥Li≥σL2,σL为区间长度阈值。将符合要求的区间头尾时间节点作为足底压力中心曲线的起点与终点。
3)压力中心曲线计算:
将以上选取区间的数据结合压力点几何位置使用压力中心公式进行计算可得到压力中心曲线。每一个时刻的压力中心计算公式如下,
(3)
其中:f为压力,x,y为图1(b)中的各压力采集点转换成平面坐标值。
各压力点的几何位置是根据个人足底情况个性化选定的,其原点(0,0)在足跟位置,横坐标正方向为右侧第一个压力点,建立坐标系后测量每一个压力点的平面坐标。通过该时刻每一个传感器接收的压力大小及其X、Y位置经过加权平均得出压力中心,即计算出当前时刻的足底压力中心平面坐标,随着时间向足趾部位移动,计算出每一个时刻的COP点,将所有COP点绘制在二维平面中即得到足底压力中心曲线。
3 鞋垫矫形厚度计算方法
为了更好地表达足底压力中心点的位置,对足底进行以额状面为截面进行分割,如图5。人体在静止站立状态时,作用在足底上的力为地面对足底垂直向上的作用力,当人体在行走过程中,作用在足底上的地面反作用力通常是由垂直力和沿着地面方向的两个剪力分量组成的三维矢量,一般行走姿势下剪切力对计算的影响非常小,可忽略不计。因此足底压力以其中任意某一截面作为对象,分析简化模型后如图6。
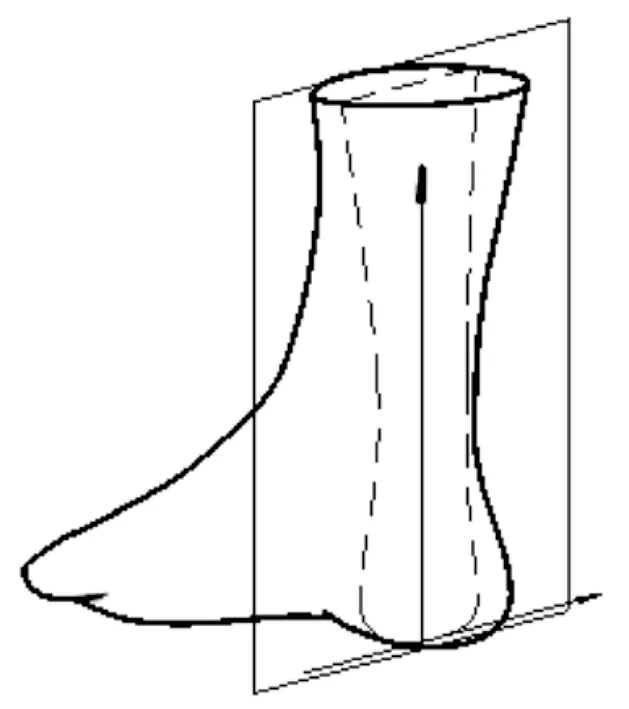
图5 截面示意图
图示中,AB两点为足底轮廓边缘点,坐标原点取AB两点的中点,已知A点为该截面左半侧等效受力点,受到地面反作用力大小为GA,B点为右半侧等效受力点,受到地面反作用力为GB,Z点为该截面的压力中心,假设Z点在原点右侧,则此时B点受力较大。根据重心公式可得:
(4)
其中:XZ为压力中心,△G为作用在该截面上的压力和,可计算得GA与GB。
若对B点下方鞋垫进行加厚,加厚高度为h,数学模型如图7。
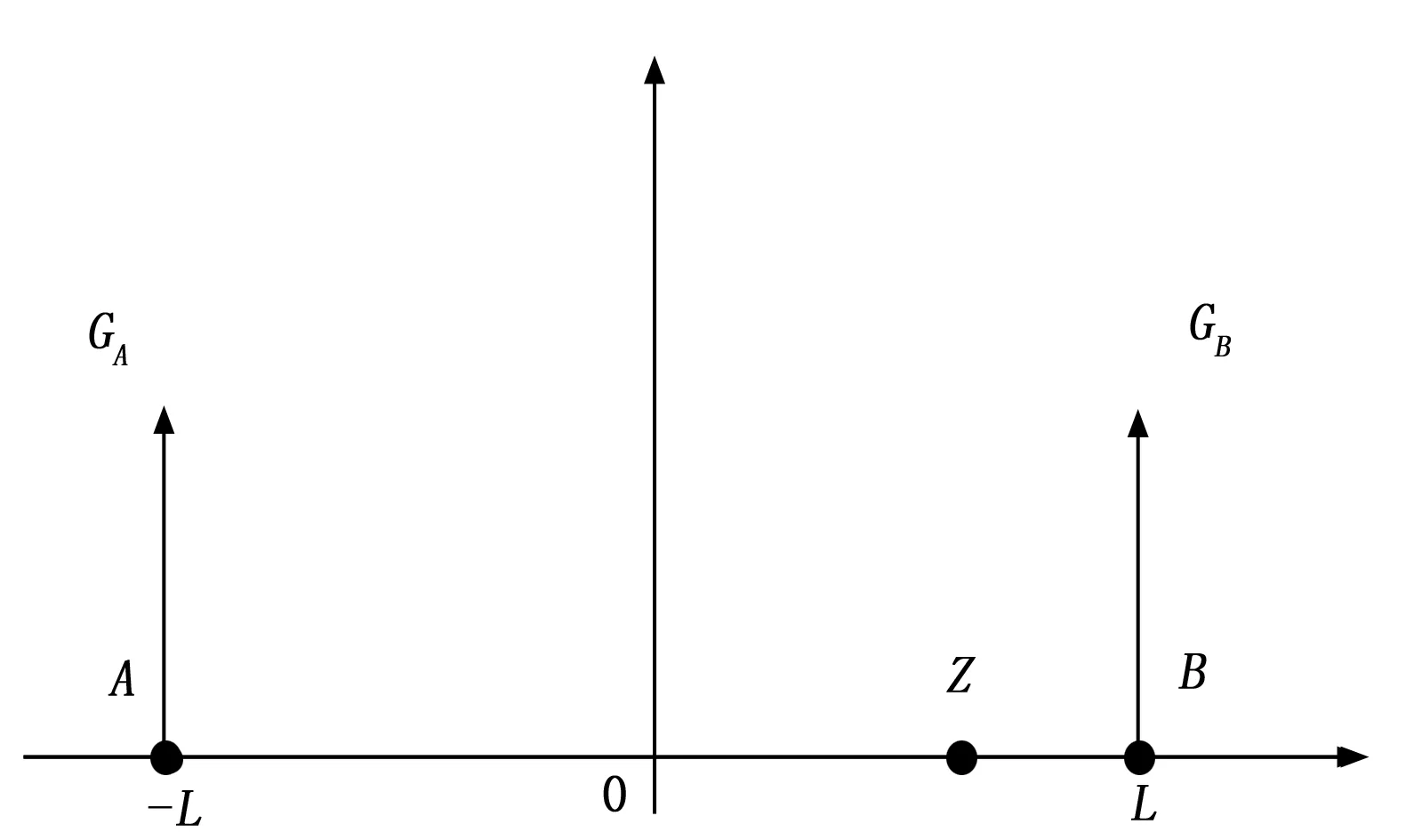
图6 简化的数学模型
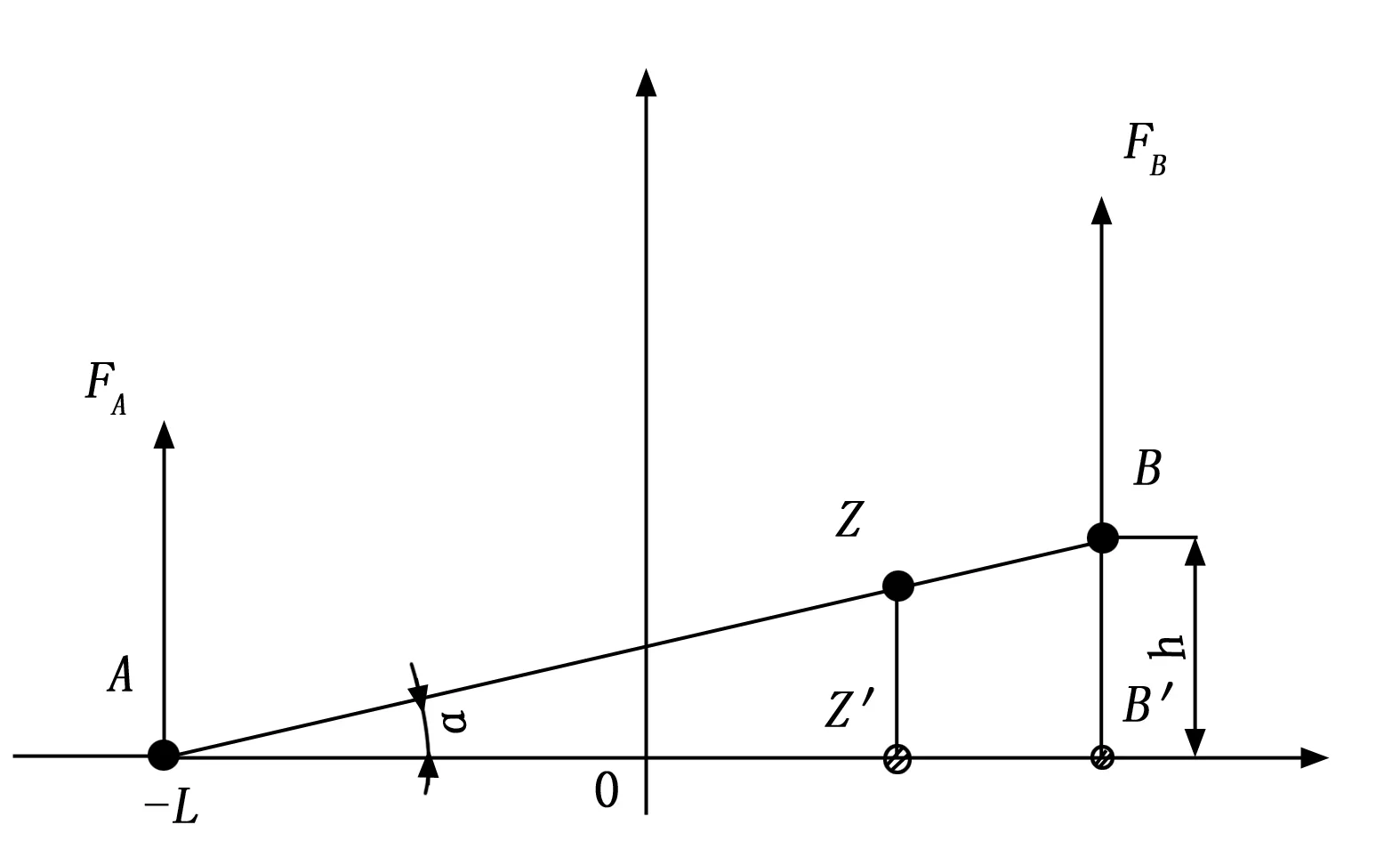
图7 加厚后的数学模型
图中坐标原点位置不变,依然位于A点右侧长度L处,FA、FB为加厚后的地面反作用力,Z′、B′为Z、B向X轴的投影点,Z点为该截面处足部质心,所以在x轴Z′上为加厚后的压力中心,α为倾角,其中AB的长度依然为2L,则:
(5)
根据几何条件可得:
(6)
可求得:
(7)
因此,可以通过与理想压力中心点的比较进行选择垫高加厚的位置,若需使中心点往左偏移,则加厚右侧,相反右偏移加厚左侧。加厚的高度可以通过代入矫正前XZ与矫正后的理想XZ′与相应的L求得。
以上为足底额状面截面处的矫形模型与计算方法描述,通过泛化的形式可以对足底鞋垫模型进行重建,达到足底压力异常的矫正目标。
4 矫形鞋垫个性化定制方式
1)传感器定位。首先将合适大小的鞋垫紧贴于脚底,然后用记号笔在鞋垫底部根据如图7所示的受力点位置做上记号,最后将鞋垫从受测试者脚上拿下,在记号的位置贴上压力传感器,保证压力传感器不弯曲、褶皱。双脚相同操作。
2)设备穿戴。首先将准备好的鞋垫放入专用鞋内,受试者穿上测试鞋,然后将采集设备穿戴于腰间,最后连接上线缆。检查线缆长度是否够长,保证在运动过程中不会过于绷紧,影响测试结果。
3)数据采集。首先打开设备电源,并按下开始采集按钮,然后请受试者按照其自身的走路习惯行走,行走距离以20米以上较佳,步数在20步以上,最后再次按下采集按钮停止数据采集。
4)数据分析。取出采集装置的SD卡,使用读卡器进行数据读取。将数据导入上位机程序,并输入压力点平面坐标,获取其步态数据,如足底压力中心曲线、双脚压力累积值、矫正前XZ的值等,以提供矫形参考。
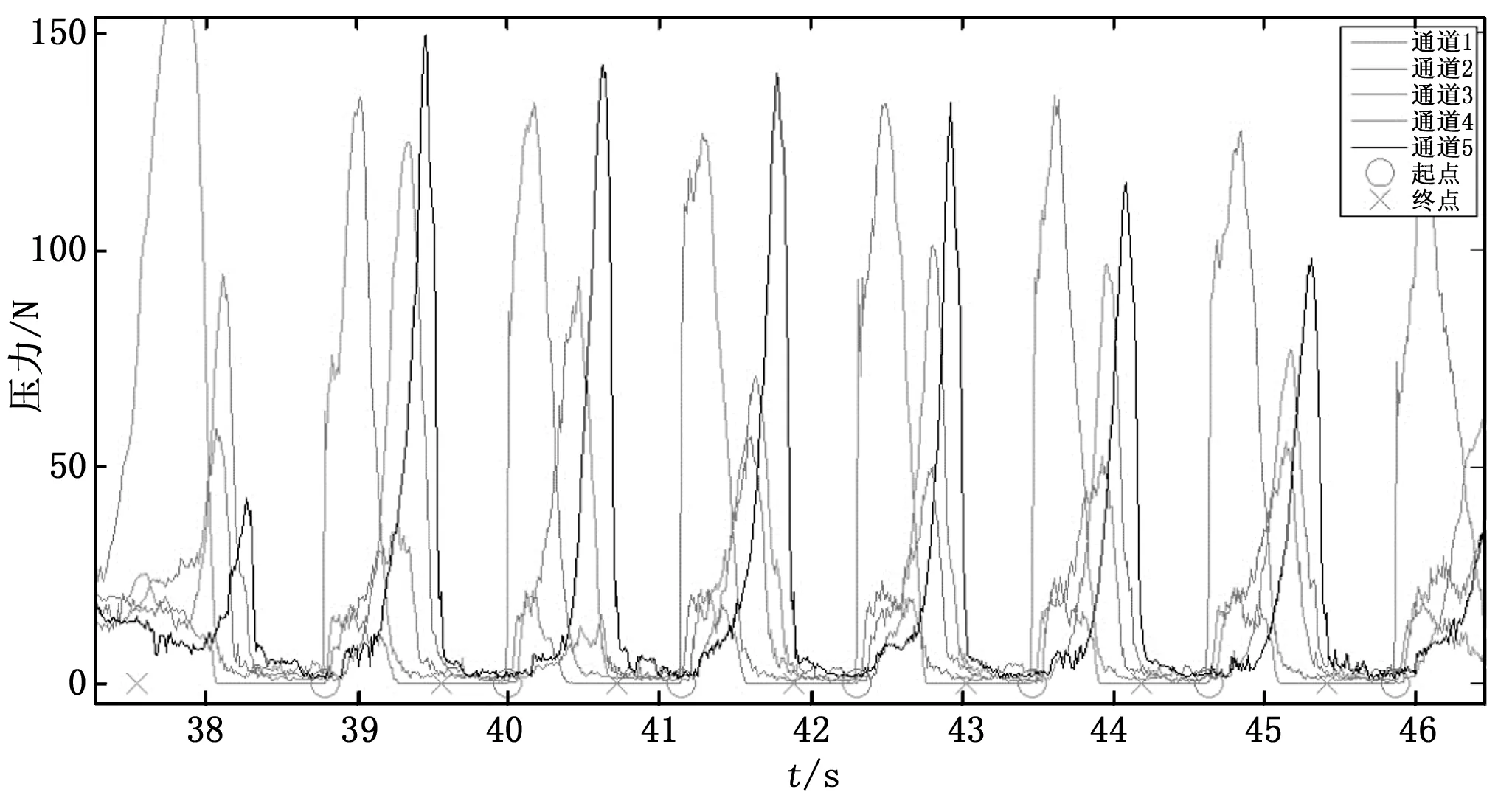
图8 起点终点示意图
5)脚底三维模型获取。通过手持式三维扫描设备分别扫描待矫正的左右足底,获取其三维模型。
6)矫形鞋垫模型制作。导入脚底三维模型,利用公式(7)计算矫形鞋垫的各处厚度并根据上一步的步态数据进行微调整,生成3D打印模型进行打印。
7)效果验证。首先将打印好的鞋垫底部按照步骤1中的位置贴上压力传感器,鞋垫放入测试鞋,然后请受试者再次穿上,重复2)~4)步骤,最后根据矫正后的步态数据进行矫正评价
5 验证实验
现对上海某康复医院某例非正常足进行矫正,经由康复医师与对象进行矫正程序讲解,并签署知情同意书。根据以上步骤采集其矫正前的足底压力数据,采集环境为医院某走廊,受试者随意走动一个来回,采集完毕后将数据导入上位机程序。上位机中均值滤波参数滤波长度设为15,尖刺噪声均被滤除,滤波性能良好,能够有效去除噪声。受试者测试时间为1分25秒,步行总长约25米,左右脚共行动32步,现通过上位机判断其每一步的起点与终点,设置其区间长度阈值最大最小值分别为1.5 s和0.5 s。其算法计算得左脚15步、右脚16步,总步数与肉眼观察步数一致,在时间点上起点与终点的分割非常准确,数据分析结果有效。其中部分起点与终点分割示意图如图8。然后根据公式(7)分别计算左右脚各步的起点与终点内的足底压力中心,最后拟合计算出受试者的足底压力中心曲线,如图9(a),相应可获得矫正前XZ的值。数据分析后发现该患者其整体走向正确,有轻微外翻的趋势,但足底压力曲线与正常压力曲线相比在M3、M4区域存在一定程度的偏离。
根据矫形鞋垫矫形厚度计算方法设计其鞋垫模型,选取其中某一额状面截面进行厚度计算,测得该截面处2L=48 mm,XZ=6.3 mm,设定理想XZ′=4 mm,通过公式计算得h=18.35 mm,因此该处截面边缘矫形鞋垫模型参考高度即为18.35 mm。同理可计算出其余各截面处矫形高度值。经过泛化处理后可得到矫形后的鞋垫模型。最后根据足底模型进行矫形鞋垫厚度的设定并结合患者实际情况做出细节上的微调,例如患者足底存在区域性的溃烂,或者足骨有明显的增生等等,需要在某区域减小鞋垫厚度或者选用更具有柔软度的材料进行复合制造。最终将修改完的矫形鞋垫模型通过3D打印技术制作即完成了矫形鞋垫的建模与制作过程。
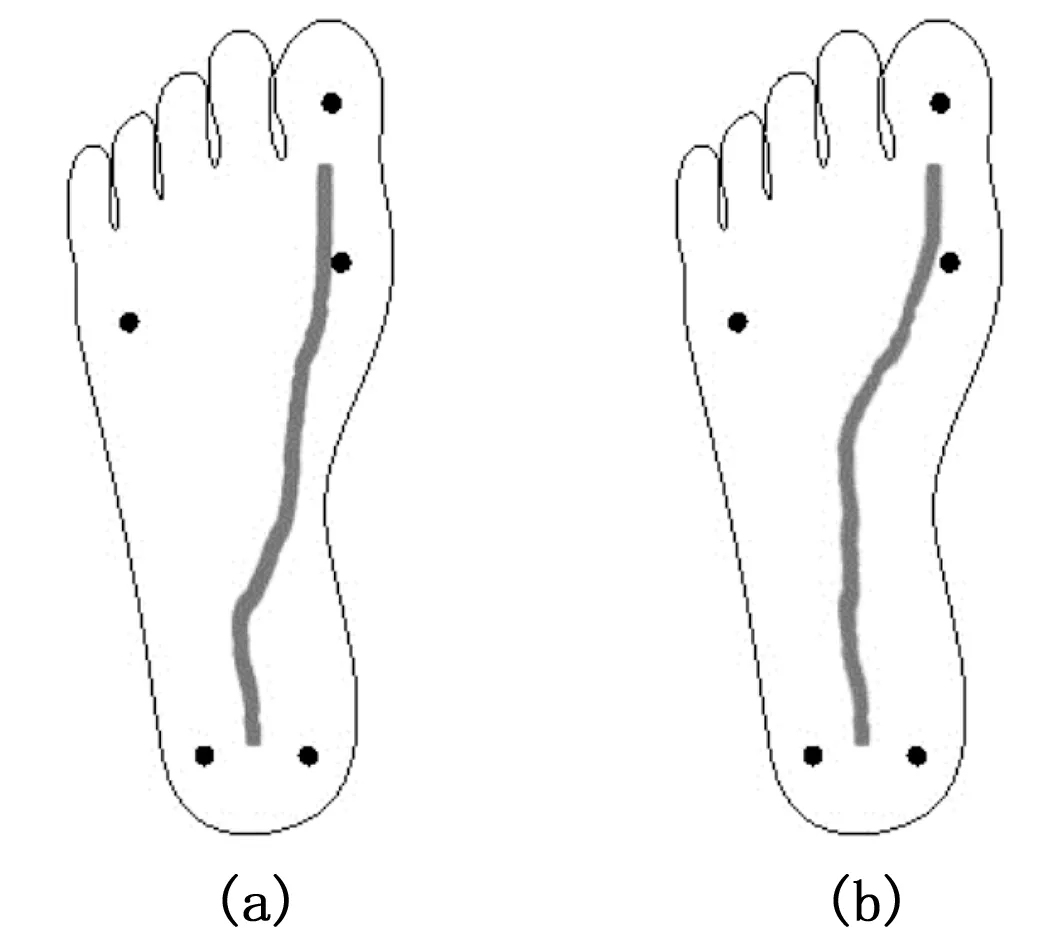
图9 矫正前后压力中心曲线对比
患者穿上矫形鞋垫进行初次验证,并再次利用足底压力测量装置进行测试,测得足底压力曲线如图9(b),相比(a)有明显的矫正效果,原本M3、M4区域存在的异常偏离已被矫正,该曲线已基本符合正常的足底压力曲线,患者整体走路姿态也发生了轻微的改变,原本较为明显的外八字有所改善,经询问患者反映该矫形鞋垫穿戴较为舒适,矫形效果理想。因此,经过对患者的个性化定制流程,可以较科学地实现矫正目标,改善患者的足底压力中心分布。
6 结束语
以上研究提出了一种矫形鞋垫个性化定制的方法,利用自制的足底压力检测装置以及开发的软件系统,采集患者在步行过程中的足底压力数据,通过分析患者的压力中心轨迹分布,量化计算矫形鞋垫需要局部加厚的厚度。整个系统自主开发,相比很多商业的大型软件,具有性价比上的优势。穿戴式的结构设计可以保证受试者自由行走不受场地限制,在矫形鞋垫定制之前穿戴测量其足底压力数据和之后穿戴验证其穿戴效果,两次穿戴的方法为矫形鞋垫治疗足部疾病的定制流程科学性提供了支持。下一步可持续跟踪受试者穿戴一段时间后的足底压力数据,通过对大量的数据进行分析计算其足底中心压力曲线的变化来对矫形鞋垫的矫形疗效做进一步分析。
