支持交会对接任务精密时间基准方法研究与实现
2020-12-08杨枫
杨 枫
(1.南京航空航天大学 航空宇航学院,南京 210016; 2.中国空间技术研究院 ,北京 100094)
0 引言
载人航天领域在多飞行器的空间交会对接过程中,作为追踪飞行器的航天器需要实时获取自身与目标飞行器的相对位置、速度以及目标飞行器的姿态,从而调整自身的方位、速度和姿态,逐步逼近目标飞行器,最终完成空间交会对接。不同于单个航天器测试,航天器交会对接测试中需要同步实时模拟航天器在轨交会对接过程中的飞行状态及时序,并同步真实模拟对接机构的机电系统动作,以验证其相互之间协调和匹配性[1]。这就需要参试航天器实现严格的实时同步动态模拟飞行和信息交互,对此过程中两个航天器状态进行同步监控和判读比对,对时统的一致性、航天器和测试系统间的协调性提出了很高的要求。系统定位精度要求尤为突出,如何为地面测试系统提供一个统一的高精度、高准确度、高稳定度的时间和频率参考标准,是准确测量星载频率标准的关键所在。因此,载人航天器测试精密时间基准的研究设,也是提高载人航天器可靠性的极为重要的辅助手段。
采用高精度时间基准同步系统对航天器测试系统实施同步控制;利用轨道仿真模拟器中的动力学仿真模拟器实现轨道信息的实时同步联动,作为交会对接过程模拟飞行的姿态控制驱动。高精度时间基准同步系统如何建立,将为多船/器联合测试、批测试提供统一的参考时间和频率,确保型号频率标准测试数据的准确性和可靠性,以便后续尽可能精确衡量星载频率标准,优化船载频率设计。同时,高精度时间基准同步系统具有向地面测试网络提供全网NTP授时的能力,为载人航天船/器地面测试验证以及多系统联试提供了有力保障。
1 精密时间基准系统设计
1.1 系统工作原理
其工作原理为:
1)高精度时间同步系统接收船载导航信号[2],经过放大后输送到北斗校频接收机等设备;
2)该接收机以北斗系统时间为参考标准,测量氢钟的频率偏差;该偏差发送给主控计算机,用户可利用该偏差值对本地钟进行校准;
3)网络时间服务器可提供NTP网口,可连至需要校时的计算机局域网,时间服务器将向该局域网的计算机提供NTP校时服务;
4)时间频率网设备通过网线连至主控计算机,主控计算机可以监测每台设备的工作状态,并可以对各设备的工作状态进行控制。
1.2 系统方案设计
采用分布式构架,包括信号层、服务层、网络层、设备层组成,系统标准时钟源采用航天器授时联合本地铷钟授时组成如图1所示,通过NTP实现系统内设备网络授时,这个系统由统一监控模块实现统一的监控管理。
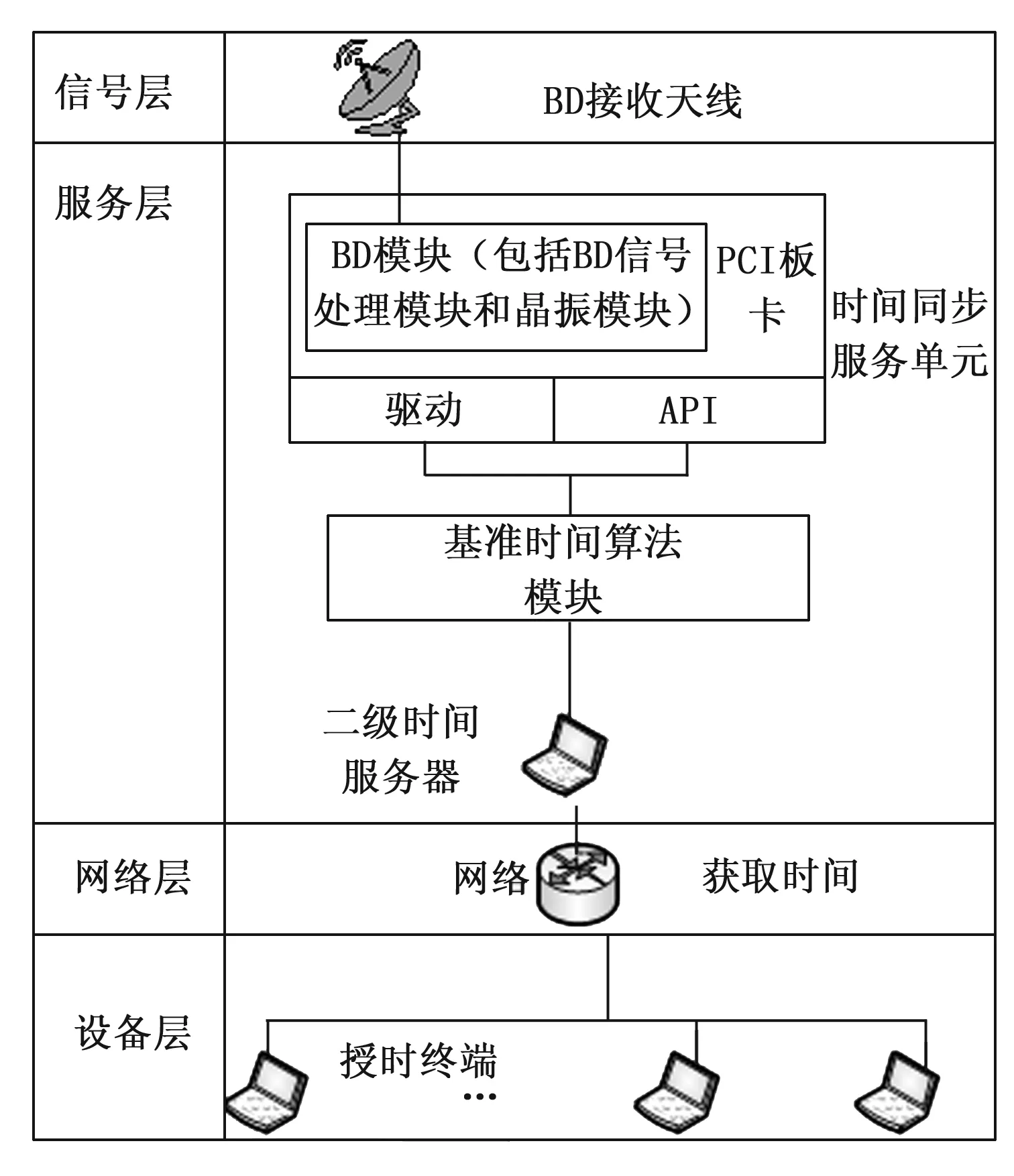
图1 校时服务器原理框图
信号层通过卫星信号接收天线,接收北斗卫星时间信号。
服务层由时间同步单元、基准算法模块、二级服务器构成。时间同步服务器接收经天线接收的时间信号并处理,联合本地铷钟组成系统标准时间源,输出系统时间同步信号,二级时间同步服务器接收时间同步服务器输出基准时间信息,通过交换机实现终端设备和时间同步服务器的隔离;二级时间同步服务器还采用授时终端同步结果;二级时间同步服务器采集设备信息、环境温湿度信息,实现系统内设备的统一监控和系统实施调度管理[3]。
网络层有网络交换机实现授时设备与时间同步服务器的物理隔离,同时保证NTP时间同步服务器报文的分发传输。
设备层即系统授时设备终端,通过网络层交换机接收时间同步信息,实现与时间同步服务的时间同步。
服务层时间同步单元PCI校时板卡通过获取信号层BD模块时间,当BD模块收到有效的BD信号后会输出接收到的时间,否则BD模块将输出晶振时间。位于系统基准时间算法模块使用PCI板卡的接口API,通过PCI总线获取时间。当基准时间算法模块通过PCI板卡获取时间成功时,二级校时服务器会校准本地精准时间并将此时间信息通过网络发送给授时终端进行校时;当基准时间算法模通过PCI板卡获取时间不成功时,二级时间服务器会将本地时间通过网络发送给授时终端进行校时。
1.3 方案详细设计
1)BD接收模块:系统采用高精度BD接收模块,接收机输出原始观测数据,接收机输出的信号与被测信号分频出的时间间隔计数器进行时差测量;
2)精密时间间隔技术器:普通的时间间隔计数器精度是10ns,精密时间间隔计数器分辨力则可达到1ns以内。目前精密时间间隔技术发展速度非常快,提高测量精确度的方法也非常复杂,本系统采用的高精度时间间隔计数器采用内插法,很大地提高了系统的健壮性;
3)改进数据处理方法:系统中的时间分段划分可以采用BD系统中时差修正的方法,按照原始数据对应的时间段编号,每天一次,从北京时间0点到8点开始,每16分钟为一个时间段落,00点8分0秒到24分为第1号段时间,23点52分开始的16分钟为第90号时段。时间划分周期是24小时,每天同一时刻均有时差数据。
系统中的时钟接收器可以接通多路BD信号,可以捕获多颗BD卫星,与单通道BD接收机相比,系统精度更高。
2 精密时间基准方法实现
在系统框架下,利用网络实现时间同步系统实时在线监控,实现系统内设备的统一时间基准管理。通过卡尔曼滤波算法、高精度时间同步算法、网络延迟矫正时间同步算法的研究,获得一种精密时间基准方法。
2.1 卡尔曼滤波算法
BD接收机在接收从外界传入的时钟信号过程中,可能受到干扰产生抖动和削弱造,为了减少时钟信号对系统精度的影响,需要在获得的时钟信号结果中进行滤波处理[4-6]。本文使用Kalman滤波算法,对时钟脉冲信号进行滤波处理。
对于该BD时间精准系统,所需的Kalman滤波方程归纳如下:
信号模型:x(k)=ax(k-1)+ω(k-1)
(1)
观测模型:y(k)=cx(k)+γ(k)
(2)

(3)

(4)
最小均方误差:Pe(k)=P1(k)-cb(k)P1(k)
(5)

(6)
2.2 本地高精度时间同步算法
在Windows平台中,系统API提供了多种途径。从API用来表述时间的数据结构上,大致可分为秒级、毫秒级、十分之一微秒级。但是,通过测试实例,发现实际表现并没有达到数据结构的表述精度。所有系统提供的API,最高的时间精度统一为大约15 μs。其波形如图2所示。
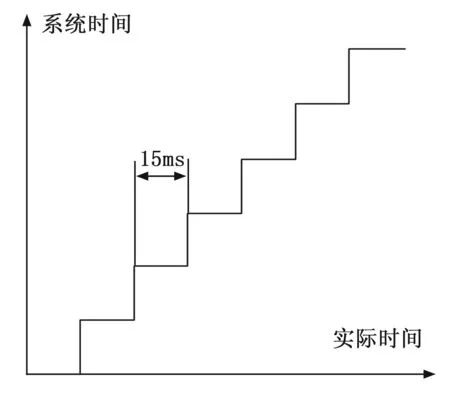
图2 系统时间API实际数值
作为时间系统的计数系统、这种精度显然不足使用。经过调研,选择了一个经常用来测试系统性能的时间计数器API:
QueryPerformanceCounter();
QueryPerformanceFrequency()。
这两个API直接利用CPU上的性能计数器晶振来进行工作。QueryPerformanceCounter()函数用来得到计数器的计数值, QueryPerformanceFrequency()函数则用来得到晶振频率。在AMD和Intel系列芯片的台式机上,这两个API的工作稳定,精度高于1/10微妙,因此采用这两个API实现高精度时间系统。
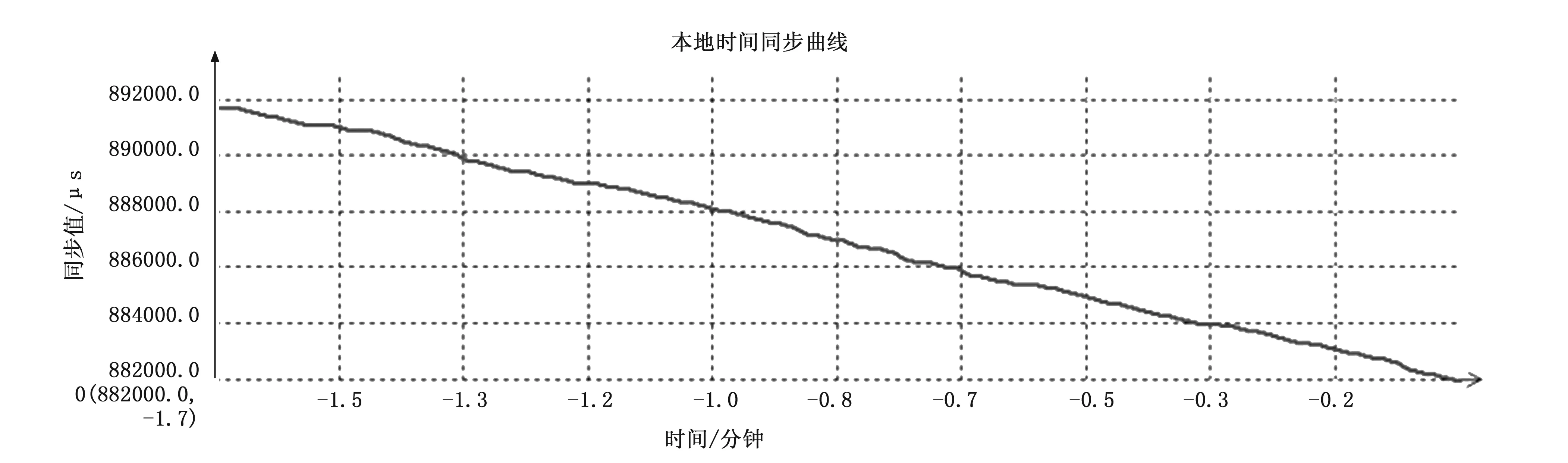
图4 LocalTimeOffset漂移曲线
利用性能计数器获取精确的相对时间,用此精密时间和系统时间进行对准,才可得到精密的系统时间。
系统时间的精度比较低,经常性地存在跳变的现象。这是系统的时间刷新进程每隔一段时间才进行刷新。校准的方式为在很小的时间段内,通过不断的读取系统时间,捕捉系统时间跳变的瞬间,如图3中两条高亮线所示。当时间值发生跳变的那一刻,认为这一刻是系统时间准确的数值,在这一刻,得到系统时间和QueryPerfermanceCounter()输出校准值(校准到时间的精度)的差值:
LocalTimeOffset[i] = 系统时间 - QueryPerfermanceCounter输出校准值。
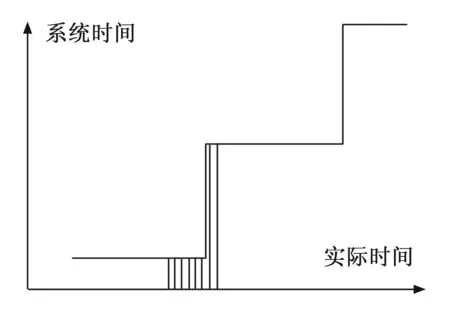
图3 系统时间校准
对多次校准的数值取平均值,任何时刻需要获取时间的时候,公式如下:
时间=(QueryPerfermanceCounter/ QueryPerfermanceFreq)* 10,000,000.0 + LocalTimeOffset
在实际应用中,LocalTimeOffset自身也存在着漂移。如图4所示,横坐标为时间线,一格为0.2分钟(12 s);纵坐标为LocalTimeOffset的数值,单位为微妙。从图中可以看出,大概24秒漂移2 000微秒。在同一台机器上不同时间内,漂移曲线的方向可能不同,斜率可能不同;在同一时刻不同机器上,漂移方向,斜率也不同。因此,为了保证本地时间的同步精度,程序将周期性的不停对系统时间进行校准。
2.3 网络延迟矫正时间同步算法
要达到对同一局域网内的不同计算机进行时间同步,必然要通过网络通讯传输时间信息。经过测试,有线网络通讯的时间如表1所示。

表1 网络通讯时间校准采样
表格中的时间数据单位统一为QueryPerformanceCounter()输出值。经过换算,Socket通讯的时间均值和方差分别为:0.433 ms、0.044 70 ms;最小传输时间和最大传输时间分别为0.294 ms、1.179 ms。
基于这种情况,网络时间的同步将使用多次交互传输的方式进行时间对齐。目的在于减小网络通讯所带来的校时误差。
校时客户机使用主机的时间插值T01,T12和本地的时间t0,t1进行比较如图5所示,得到网络间时间差NetworkTimeOffset。 则在客户机上,得到了同校时主机对准了的高精度时间。考虑到网络通讯的时间消耗不稳定,程序采集了多次时间,并对多次时间的结果进行了平均,得到了平均网络偏差NetworkTimeOffset_Avg。用平均偏差,反向验证采集的时间的数值,得到偏差值的方差特性,一定程度上可以反映校时的精度。图6~7是某一时刻,校时主机和校时客户机的状态曲线。
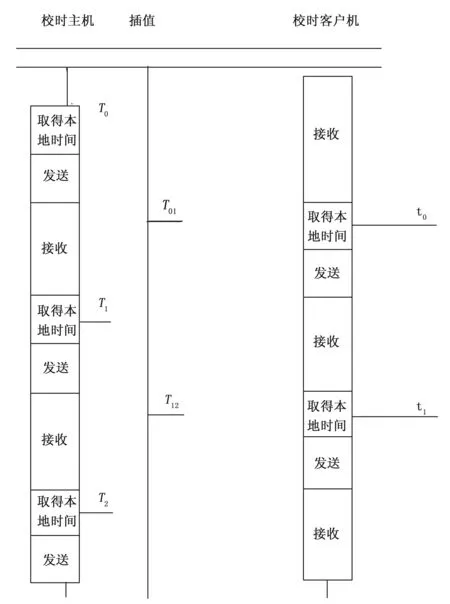
图5 网络校时交互流程
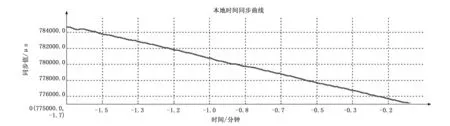
图6 主机本地时间
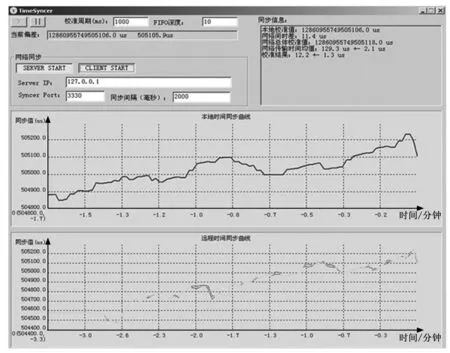
图7 客户机网络校时
图7中下面的曲线,在主曲线上下的细线表示的是方差区间,从图中可以看出,网络校时的精度可以达到1 μs以内。
2.4 高精度时间同步软件的设计
由于系统采用了C/S的结构,所以总线数据的报告时间需要得到毫秒级的计时精度。意味着需要通过网络通讯技术,达到异地1 μs的同步时间精度。
客户在使用综合测试系统测试软件之前,应该首先打开高精度时间同步软件。主控计算机软件具有自动打开高精度时间同步软件的功能。
运行有两种模式,作为授时服务器端或作为授时客户端。在局域网上协同工作的计算机上,需要有一台计算机的时间同步软件作为服务器端运行,其它计算机的时间同步软件则作为客户端运行,连接这个服务器端以实现时间的同步。
可通过用户选择显示图形,界面下方会显示本地时间以及服务器时间标签等曲线表明了当前的同步情况,供软件时观察校对时间使用。在此软件的设计中可以看出,时间同步的算法是本软件的关键所在。
3 试验结果与分析
精密时间系统需要将各时间频率信号分配传输到各个型号的测试设备间,作为地面测试系统的校准时间基准,每个测试设备间都需要高指标的时间频率信号,因此系统产生的信号无损地分配输出,同时还需要具有很高的路间及反向隔离度,以避免测试操作时系统间的相互影响。完成系统网络搭建后,进行了系统级联合测试,测试结果表明时间精准数据经过长距离传输稳定。
高精度时间同步软件用于获取精度达1 ms的准确时间,同时在局域网上可以实现多台主机之间的时间同步。软件主界面如图8所示。
高精度时间同步系统为测试试验数据并行异步处理提供了精准时间戳。航天器测试间内的测试系统与高精度时间同步系统通过测试局域网连接,各测试软件通过TCP/IP或者UDP协议进行数据交换,遵循航天器测试间通信协议进行数据时间统一。
4 结束语
精密时间基准方法设计可以解决多艘载人航天器交会对接地面验证过程中时间和频率标准问题,确保了网络系统输出信号的准确性。在实际应用过程中,支持多航天器高精度时间基准、频率,避免了进口氢钟输出信号有限的限制。该系统可以根据任务需求,跨网段或另行组网和扩展,同时支持远程测试,可满足后续更多型号需求。以正在运行的北斗信号为基准,输出时间和频率信号。支持载人航天器地面验证、GNC分系统、测控分系统以及有效载荷获取高精度的参考标准,提高了各分系统时频测试精度。此项研究解决了各时间频率信号的无损输出,多地联合测试时时间同步精准对各航天器测试相互影响的问题。时间同步系统构架应用在载人航天领域,实现了高精度时间精准的计算、获取和分布式网络授时。
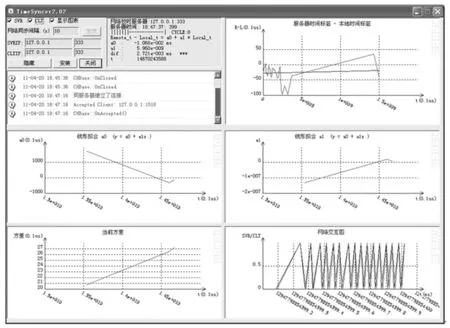
图8 高精度对时软件主界面
