城市轨道交通电机械制动系统总体设计方案和关键技术研究
2020-12-07王健
王健

摘 要:电机械制动系统在城市轨道交通领域属于新型制动系统,文章首先简单介绍电机械制动系统,然后以 100% 低地板有轨电车为例,从基本组成、总体架构和工作原理几个方面介绍电机械制动系统的总体设计方案,最后提出有待进一步研究的相关关键技术。
关键词:城市轨道交通;EMB系统;总体设计方案;关键技术;研究
中图分类号:U270.35
城市轨道交通现有的空气制动、液压制动系统已发展多年,积累了成熟的技术方案并得到广泛应用,但随着工业控制技术的革新和城市轨道交通整体性能的不断提高,对制动系统电气化的要求不断提高已成必然趋势。目前,城市轨道交通制动系统的制动指令已经实现了电气化,但在将制动指令转换为制动力的环节中仍然无法摆脱对空气或液压介质的依赖,从而限制了制动系统在高响应、轻量化、环保性方向的进一步发展。在应对城市轨道交通车辆制动系统发展的新需求,提高产品的电气化、自动化程度等方面,具有高集成、快响应、高精度特性的电机械制动(EMB)技术提供了潜在的解决方案,其在航空[1-3]、汽车[4-5]领域已经有了一定的应用经验,但在城市轨道交通领域还处在探索阶段。因此,应充分借鉴其他行业的成功经验,结合城市轨道交通的自身特点,对既有系统进行EMB优化设计,以推动城市轨道交通制动系统向轻量化、智能化方面发展。
1 电机械制动系统简介
EMB技术是一种通过电机驱动机械传动机构使其输出直线运动实现制动摩擦副的夹紧动作,从而输出可控制动力的新型制动技术[6]。相对于目前成熟的空气制动和液压制动系统,EMB系统的优点主要体现在以下几方面[7]。
(1)轻量化。由于省去了沉重复杂的管路和控制元件,因此可降低系统的整体复杂度,大幅提高单位质量制动力的输出能力。
(2)故障点减少和高可维护性。系统的零部件大量减少,可减少其相应的故障点,从根本上避免了介质泄露风险,更加环保;产品模块化的集成,降低了调试和维护的难度。
(3)高性能和智能化。实现夹紧力直接闭环控制,相比介质压力闭环控制精度更高、响应更快;且具有丰富的自检及状态监控功能,可实现元件故障的自动识别和定位功能。
(4)高效节能。避免了传统介质压力制动系统造成的能量损失;由于采用电机直接驱动,可减少中间环节和额外的效率损失。
2 总体设计方案
为更有针对性地说明EMB系统在城市轨道交通领域的应用和基本架构,本文以原本采用液压制动系统的100%低地板有轨电车为例,从基本组成、总体架构和工作原理几方面介绍将其转变为EMB系统的总体设计方案。
2.1 基本组成
100%低地板有轨电车的EMB系统采用架控的系统架构,以一个转向架的制动系统为一个控制单元,独立执行控制逻辑,各转向架之间具备协同工作的机制。单个转向架EMB系统由制动控制单元、供电模块、基础制动装置及其对应的电机控制器组成。
2.1.1 制动控制单元
制动控制单元是制动系统的控制核心,负责制动系统与车辆网络通信、指令接收、状态反馈、轴速信息(模拟量信号或网络信号)采集、制动力计算、制动指令输出等功能,包括电源模块、状态输出模块、网络通信模块、硬线指令模块、制动计算及调度模块等,将制动系统状态、制动施加状态、制动缓解状态、轴速信息等发送至车辆网络供列车控制与监控系统(TCMS)等使用。
在常用制动模式中,制动控制单元通过网络接收摩擦制动力的需求,并考虑自身黏着、防滑、冲动限制等参数进行实时动态计算,将制动力通过控制器局域网络(CAN)或模拟量指令分配给连接的各电机控制器执行。系统中设置的双路CAN网络互为冗余,制动指令和电机控制器状态优先通过CAN网络传输,在CAN网络发生故障时制动控制单元通过模拟量线路传输制动力指令给各电机控制器。
2.1.2 供电模块
供电模块负责电机控制器和基础制动装置的供电,接入车辆低压供电系统,通过电池管理单元(BMU)对内部的电容模组进行充放电控制。当低压供电线路供电正常时,电机控制器和基础制动装置从低压供电线路获取电能;当低压供电线路供电异常(电压过低)时,供电模块内的电容模组给列车提供电能,保证EMB系统的正常工作。
2.1.3 基础制动装置
基础制动装置由作动器、托架、制动杠杆、制动盘、闸片等部件组成,其中作动器接收电机控制器的实时制动力指令并输出制动力,其输出轴通过杠杆推动闸片作用于制动盘产生制动扭矩。另外,基础制动装置还设置手动缓解功能,由人工拉动制动缸后端的手动缓解拉环实现。每个基础制动装置都带有停放制动功能。
基础制动装置结构示意图如图1所示,其通过机械接口安装在转向架上,通过电气接口和电机控制器相连。基础制动装置上的作动器(图1中的绿色部分)作为制动力输出元件,接收电机控制器的驱动信号并执行相应动作,电机轉动通过运动转换机构输出为直线运动,该直线运动通过制动杠杆作用于闸片,通过闸片和制动盘构成的摩擦副实现制动力的输出。作动器内的霍尔元件用于反馈电机转子的位置,力传感器将制动力实时反馈给电机控制器,从而实现制动力的精确控制。图1中的红色部分为紧急/停车制动装置,供电正常时,其内的弹簧压缩,夹钳输出力由电机正常控制;失去供电时,其内的弹簧弹出,限制电机运动,从而保持夹钳输出力,实现紧急制动和停车制动。
2.1.4 电机控制器
电机控制器根据指令完成制动力的施加和缓解,实现间隙的自动调整,以及意外断电制动施加、故障保护和运行等功能。电机控制器包括制动力控制、电源、功率驱动等模块。
电机控制器通过CAN网络和制动控制单元通信,接收制动指令,反馈实际制动力、自身状态等信息。电机控制器与制动控制单元之间通过网络实时发送生命信号确保通信的可靠性,它们之间设有硬线接口,在网络发生故障时可通过硬线传输指令反馈状态。
此外,电机控制器直接接收车辆紧急制动指令硬线的信号,优先根据硬线信号施加制动力,同时接收制动控制单元通过CAN网络发送的制动力指令作为紧急制动下的指令备份。
每个电机控制器控制1套基础制动装置,将接收到的目标制动力指令转化为电机驱动信号,并根据基础制动装置实时反馈的实际制动力进行闭环控制。
2.2 总体架构
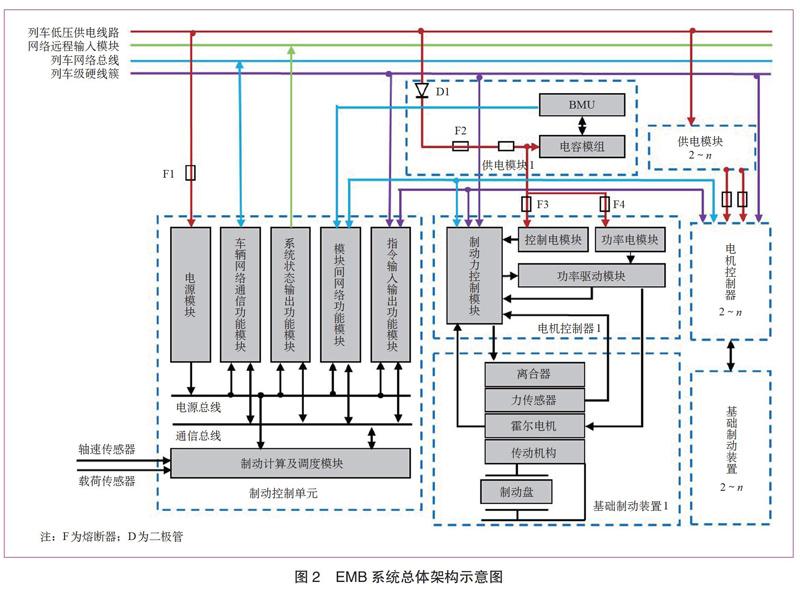
100%低地板有轨电车采用两动一拖“Mc1—T—Mc2”的编组方式,Mc1和Mc2车分别配置1套EMB系统,包含1个制动控制单元、2个供电模块、2个电机控制器和2套基础制动装置;T车配置1套EMB系统,包含1个制动控制单元、4个供电模块、4个电机控制器和4套基础制动装置。制动控制单元和供电模块安装于车内顶板,电机控制器吊挂于车厢下方,基础制动装置安装于转向架上。单个转向架EMB系统的总体架构示意图如图2所示,其中n表示电机控制器和基础制动装置的数量,对于Mc1和Mc2车,n = 2;对于T车,n = 4。
2.3 工作原理
EMB系统具有常用制动、紧急制动、停放制动、防滑保护和手动缓解等功能。司机控制器发出的制动指令通过列车制动指令线传送给TCMS。
2.3.1 常用制动
常用制动采用电制动和EMB的复合制动,由TCMS根据制动指令计算出所需的目标制动力,通过列车网络发送给牵引控制单元(TCU),TCU根据此目标制动力施加电制动力,同时将实际电制动力反馈给TCMS。TCMS将实际电制动力和所需制动力进行比较,若电制动力能够满足制动要求,则不施加EMB;若电制动力不能满足制动要求,则施加EMB进行补充。TCMS按照上述方法将计算的目标电机械制动力需求通过网络发送至制动控制单元,制动控制单元施加相应的摩擦制动力。制动力的增加和减小根据冲动限制设定的速率进行。
当列车网络发生故障时,制动控制单元根据制动硬线指令,按照设定的制动力施加。
当常用制动速度减至指定速度时,牵引系统通过网络发送“电制动衰退信号”给制动系统,控制电制动平稳切换至EMB。
2.3.2 紧急制动
紧急制动采用摩擦制动方式,一旦施加,在车辆停车前不能缓解,且不具备防滑控制功能。
2.3.3 停放制动
当车辆在停放状态断电时,基础制动装置中的停放装置通过弹簧实现夹钳夹紧,从而保证车辆在坡道上静止不动。
2.3.4 防滑保护
(1)拖车的滑行控制由制动控制单元完成,其根据安装在每根轴上的速度传感器信号计算出各轴的速度、速度差和减速度,从而判断车轮是否发生滑行,若发生滑行,则控制基础制动装置施加压力,恢复黏着状态。
(2)動车的滑行控制由TCU控制。当发生滑行时,首先进行电制动防滑控制,即由TCU控制减小电制动力,同时把电制动滑行信号传给制动控制单元,制动控制单元不会因电制动力的减小而补充EMB。如果TCU的防滑控制超过指定时间,则切除电制动,TCMS重新计算EMB的制动力,然后利用车轴的速度信号进行摩擦制动的防滑控制。
2.3.5 手动缓解
手动缓解由基础制动装置上的拉环实现。车辆处于停放状态需要手动缓解时,可人工拉动基础制动装置后端的手动缓解拉环将弹簧复位,从而实现制动缓解。
3 关键技术及其研究现状
为加快EMB系统在城市轨道交通车辆领域的应用,需要对基础制动装置设计、制动控制算法、抗干扰技术等关键技术进行进一步的研究。
3.1 基础制动装置设计
一个典型的基础制动装置应当具有以下机构:①提供驱动力的力矩电机;②将圆周运动转化为直线运动的机构;③力的放大机构;④力或位移传感器。由于城市轨道交通车辆转向架空间的限制,制动系统的安装接口和安装空间的要求较高,在使用EMB系统时,需要将电机、减速机构等众多元件集成在制动夹钳上,因此对基础制动装置的整体结构尺寸设计提出了更高的要求。在进行基础制动装置设计时,需要根据现有车型的安装接口、尺寸限制,综合考虑电机选型、机构布局、位置反馈技术以及传动机构类型等因素。
如同济大学开发的第三代系统样机的基础制动装置由盘型中空力矩电机、行星齿轮减速机构、滚珠丝杠副、失电电磁离合器组成。常用制动时,电机产生的力矩通过行星齿轮减速器放大传递给滚珠丝杠螺母,螺母的旋转运动再通过螺旋机构转换为滚珠丝杠的平动传递至压盘,进而通过制动夹钳上的制动杠杆使闸片与制动盘压紧。电磁离合器是实施停放制动的关键元件,在常用制动时,电磁离合器通电,对螺母无制动作用;在停放制动时,首先通过电机将丝杠运动到位,然后离合器断电,对螺母产生制动作用,此时螺母不能回转,随后电机断电,从而实现停放制动。
综上所述,基础制动装置对力矩电机的性能和结构要求较高,因此结构紧凑、体积小巧同时可提供大力矩、快速反应的力矩电机的设计将是未来需要关注的重点;另外,制动执行机构的机械零件繁多、结构复杂,如何简化机构组成同时更有效地传递并增大扭矩也是EMB走向实用的关键研究。
3.2 制动控制算法
EMB系统制动力施加和缓解的精确性和响应速度依赖于电机控制器中的制动控制算法,因此其优化和改进对EMB系统具有重要意义。制动控制算法应能够根据目标指令实现对制动作动器在全制动力范围的制动力连续闭环控制,同时实现间隙的自动调整,以补偿制动摩擦副的磨损。
常见的制动力控制算法包括串联比例-微分(PI)控制、比例积分微分(PID)控制、滑模控制和逻辑门控制算法等[8-10]。目前在制动控制算法研究上,精确的控制算法较为复杂,在程序编写的可实现性上存在难度,实际应用的可行性不高[11-13]。在简化程序实现的同时,保证控制精度和响应速度的制动控制算法将是未来研究的重点。
3.3 抗环境干扰技术
EMB系统的基础制动装置安装于转向架,运行过程中冲击振动较强,对电机和其他机械零件的工作状态和组件寿命可能造成影响[14],如电机的永磁体可能发生退磁等,因此需要研究上述装置在冲击振动下的稳定性,同时在设计安装方式时应考虑抗冲击振动的因素。
此外,吊装在车厢下方的电机控制器和转向架上电机的散热条件不佳,在运行过程中可能出现过热情况,因此,需要考虑其在高温条件下的稳定性和性能,同时可考虑专门设计散热结构,以保证系统稳定可靠地运行[15]。
目前,城市轨道交通车辆EMB系统的散热设计和防震设计还缺乏相关的仿真和实验研究,为保证EMB系统的稳定、可靠运行,在未来加强相关技术的研究是十分有必要的。
4 结语
本文简要介绍EMB系统,设计出针对100%低地板有轨电车的EMB系统典型方案,论述其基本组成和工作原理,提出未来有待进一步研究的关键技术(如基础制动装置设计、制动控制算法和抗环境干扰技术),并阐述了各关键技术的研究现状。
参考文献
[1]李洪果,王锴,吴瑞祥,等.飞机全电刹车系统研究[J].北京航空航天大学学报,2004,30(4):339-343.
[2]张秋红,李玉忍.飞机全电刹车系统设计与分析[J].航空计算技术,2003,33(3):97-100.
[3]李化良.飞机全电刹车控制系统的研究与设计[D].陕西西安:西北工业大学,2006.
[4]左斌.汽车电子机械制动(EMB)控制系统关键技术研究[D].浙江杭州:浙江大学,2014.
[5]李顶根,张绿原,何保华.基于滑移率的汽车电子机械制动系统的模糊控制[J].机械工程学报,2012,48(20):121-126.
[6]张猛,宋健.电子机械制动系统发展现状[J].机械科学与技术,2005,24(2):208-211.
[7]王俊鼎.电子机械制动控制系统的研究[D].浙江杭州:浙江大学,2016.
[8]R. Schwarz, R. Isermann, J. Bohm, et al. Modeling and control of an electromechanical disk brake[J]. AE Technical Paper,1998,60(2):15-22.
[9]P. Krishnamurthy, W. Lu, F. Khorrami, et al. Robust force control of an SRM-Based electromechanical brake and experimental results[J].IEEE Transactions on Control Systems Technology,2009,17(6):1306-1317.
[10] Y. H. Ki, K. J. Lee, J. S. Cheon, et al. Design and implementation of a new clamping force estimator in electro-mechanical brake systems[J]. International Journal of Automotive Technology,2013,14(5):739-745.
[11] Chihoon Jo, Sungho Hwang, Hyunsoo Kim. Clamping-force control for electromechanical brake[J]. IEEE Transactions on Vehicular Technology,2010,59(7):3205-3212.
[12] W. Xiang, P. C. Richardson, C. Zhao, et al. Automobile brake-by-wire control system design and analysis[J]. IEEE Transactions on Vehicular Technology,2008,57(1),138-145.
[13] 吳萌岭,周嘉俊,田春,等.轨道交通制动系统创新技术[J].现代城市轨道交通,2019(7):30-35.
[14] 明月.不同定子结构的永磁无刷直流电动机电磁干扰和振动特性研究[D].浙江杭州:浙江大学,2011.
[15] 杜国华,房建成,刘西全,等.高速永磁无刷直流电机的热分析[J].北京航空航天大学学报,2012,38(8):1101-1105.
收稿日期 2020-04-17
责任编辑 党选丽
