具有视觉识别能力的双轮机器人设计
2020-12-06钱春阳许鹏
钱春阳 许鹏


摘 要:为达到使双轮机器人身体平衡的目的,本文基于模糊理论,设计出一款具有视觉识别能力的双轮机器人。其间利用PDA通过网络方式监控机器人,以便任意控制二轮机器人前进、后退及左右转向,同时依靠主动式自我平衡控制器的作用,使机器人保持身体平衡而不倒。
关键词:视觉识别;机器人;系统设计;双轮机器人
中图分类号:TP242文献标识码:A文章编号:1003-5168(2020)29-0052-03
Abstract: In order to achieve the purpose of balancing the body of the two-wheeled robot, this paper designed a two-wheeled robot with visual identity ability based on fuzzy theory. In the meantime, the PDA is used to monitor the robot through the network, so as to control the two-wheeled robot to move forward, backward, and turn left and right, at the same time, relying on the function of the active self-balancing controller, the robot can maintain the balance of the body without falling.
Keywords: visual identity;robot;system design;two-wheeled robot
近年来,半导体行业高速发展,加快了机器人时代的来临,为了满足人们的多样需求,各种不同功能的机器人应运而生;无论是生产制造、家庭娱乐,还是环境安全维护、外层空间探险等,机器人都扮演着举足轻重的角色[1-3]。因此,世界各国对机器人的研发可以说是不遗余力[4-5],比如,日本SONY的机器狗AIBO、HONDA人形机器人以及美国著名大学Massachusetts Institute of Technology(MIT)所发展的各类仿生物行走机器人等,都一再打破了技术上的限制与众人的想象,展现了人类的智慧与巧思。鉴于此,笔者便产生了自行研发一个机器人的构想。
本研究采用的原始动机来自国外发名家Kamen所发明的Segway双轮电动滑板车,其具有模仿人体平衡感的功能,可以自动平衡并保持直立。因此,笔者便利用此概念来达到使双轮机器人身体平衡的目的。为达此目的,本研究必须设计一个主动式平衡控制器,利用传统倒单摆控制的概念,并考虑身体与轮子的相对角度与角速度关系,将其当作控制变量,主动控制两轮的转速与转向,使身体保持直立并且能自由转向、前进、后退[6-7]。其间利用模糊平衡控制器,有效地达成多项复杂任务,如两轮机器人平衡控制、人机接口的亲和力提升、无线影像传输系统构建。同时,由于设计了视觉传感器,因此其也具有初步的感测外界能力。
1 设计方法
下面首先说明整个控制平台的运动模式。机器人身体部分以轮轴为中心做前后摆动,若以车身垂直地面为0°,则车身可摆动的范围为-90°~+90°,如图1所示。
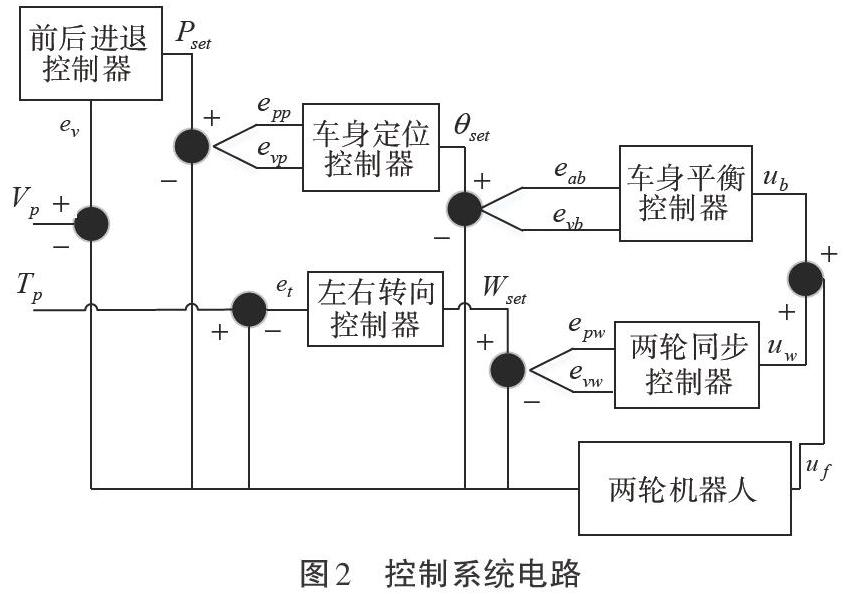
了解受控平台的运动模式、行动决策后,在要求系统的反应速度快及控制方法简单的前提下,为了达到两轮机器人能行动自如的目的,本研究设计出三个控制器,其分别为平衡控制器、定位控制器及两轮同步控制器。平衡控制器是以车身倾斜的角度(eab)及角速度(evb)为输入,计算出适当的马达出力值(ub)来追回车身的重心。定位控制器用来克服车身为了保持直立而偏离定位点的情况,其输入是轮子转动的位置(epp)及速度(evp),输出为偏向角([θset])。两轮同步控制器则用于修正两轮因马达特性不一致而产生的转动量误差,两个输入分别为左右轮位置差值(epw)及差值变化量(evw),输出为马达出力补偿值(uw),为了使得双轮车能前进后退及左右转向,本研究设计了前进后退控制器及左右转向控制器,分别通过更改车身定位点参数(Vp)及两轮位置差值参数(Tp)来影响双轮车的行为。双轮机器人控制系统的电路如图2所示。
2 系统架构
一般而言,自走车可归为机器人一类。机器人可以说是最佳系统整合的象征,也是本研究最终所要达成的目标。而以移动方式来说,机器人除了以车轮带动外,还有其他许多不同的形式,例如,以“足”为移动机构的步行机器人,常见有六足机器人、四足机器人,另外甚至有双足机器人。整体来说,步行机器人的行进速度较慢,但可以应用在较复杂的地形,如凹凸不平的路面或是跨越阶梯。至于车形机器人则有移动灵活的优势,但通常只适用于平坦的路面。另外,尚有配备各种大小吸盘及飞行机构的攀墙机器人。
本研究以模糊理论为基础,设计出一款具有视觉识别能力的双轮机器人。其间利用PDA通过网络方式监控机器人,任意控制二轮机器人前进、后退及左右转向,同时依靠主动式自我平衡控制器的作用,使机器人保持身体平衡而不倒。主要目标是设计一个具有自我维持平衡能力的双轮机器人,使其可行驶在倾斜不水平的地形上。最后可将车上之数字影像数据及车子的速度、角速度等数据经由网络传送,将其数据用响应图表现出来,而通过人机接口,人们可以任意控制二輪机器人前进、后退及左右转向。
3 系统设计
系统的硬件电路设计主要包括直流马达、TA8429H电机驱动电路、光耦合保护电路PC817、PWM产生电路8254、8255可编程并行I/O接口芯片、主控制芯片W78E58B、扩充32K SDRAM、信号电压转换接口、外围信号处理芯片W78E58B、串行服务器GW-21、译码电路HCTL2020、取样电路ADC0804、光编码器、滤波电路OPA2340、倾角传感器、角速度陀螺仪、RF接收电路NT-R03A以及单片机AT89 C2051,如图3所示。
人们可以通过无线局域网或有线通信介质将双轮机器人产生的数据传送到远程监控平台,远程监控平台可实时监控机器人的运动状態,也可以向机器人发送指令使机器人按照要求执行任务。同时,可以通过遥控器命令双轮机器人执行相应操作,遥控装置及供电系统设计如图4所示。
为使双轮机器人具有视觉识别功能,本研究设计了实时视觉服务追踪系统。该系统由影像处理单元和轨迹运算单元组成。影像处理单元的主要功能是对摄影机拍摄的连续影像进行移动目标物的分割,也就是将移动目标物快速侦测出来。本研究采用背景相减法侦测移动目标物,此方法的运算量较小,可做到即时移动目标物侦测。而轨迹运算单元的主要功能是明确影像处理单元中找出的目标物的部分运动轨迹,将目标物的运动轨迹数据代入基于模糊理论的类神经网络设计的动态方程式中,利用类神经网络本身具有的数据拟合特性来估测目标对象的运动轨迹,作为机器人即时响应动作的依据。
4 结论
为达到使双轮机器人身体平衡的目的,本文利用PDA通过网络方式监控机器人,任意控制二轮机器人前进、后退及左右转向,同时依靠主动式自我平衡控制器的作用,使机器保持身体平衡而不倒。为使双轮机器人具有视觉识别功能,本研究设计了实时视觉服务追踪系统。
参考文献:
[1]翟国栋,张文涛,岳中文,等.基于双目视觉技术的煤矿救援机器人研究进展[J].煤炭科学技术,2020(7):1-13.
[2]林煜生.图像透视校正在移动机器人视觉识别中的应用[J].科技创新与应用,2020(18):28-30.
[3]范昭君.智能控制在自动捡球机器人中的应用[J].自动化技术与应用,2020(5):67-71.
[4]马宏伟,王岩,杨林.煤矿井下移动机器人深度视觉自主导航研究[J].煤炭学报,2020(6):2193-2206.
[5]郭军.基于机器视觉的机器人工件定位系统研究及实际应用[J].科学技术创新,2020(14):103-104.
[6]韩江云,虞媛媛,郭柴琪,等.基于视觉的自主巡逻机器人技术研究[J].科学技术创新,2020(14):178-179.
[7]季云峰,任杰,施之皓.乒乓球机器人视觉系统的实时跟踪[J].上海体育学院学报,2020(6):70-75.
