ABS系统仿真设计
2020-12-06钱仁拥关宏伟
钱仁拥 关宏伟


摘 要:本文分析了ABS系统的工作原理,建立了ABS系统的模型,根据该模型,设计了基于Matlab/Simulink的ABS系统,其间分别采用Bang-Bang策略和PID策略进行了ABS控制系统的设计与分析。在其他条件相同的情况下,对制动时间、滑移率、车速这三个对制动效果起决定性作用的变量进行对比研究,比较两种控制器的控制效果。
关键词:Matlab;ABS;Bang-Bang;PID
中图分类号:U463.52文献标识码:A文章编号:1003-5168(2020)29-0017-04
Abstract: This paper analyzed the working principle of the ABS system, established a model of the ABS system, and designed an ABS system based on Matlab/Simulink according to this model, and used the Bang-Bang strategy and PID strategy to design and analyze the ABS control system in the meaning time. Under the same other conditions, the three variables that played a decisive role in braking effect, namely braking time, slip rate, and vehicle speed, were compared and studied, and the control effects of the two controllers were compared.
Keywords: Matlab;ABS;Bang-Bang;PID
防抱死制动系统(Anti-lock Braking System,ABS)是汽车上必不可少的一种安全装置,其目的是在高速行驶或者制动过程中防止车轮打滑,保证车上人员的安全[1]。该技术在20世纪80年代开始应用在汽车上。据了解,在遇到突发情况时,大部分驾驶员都会用力踩刹车,这就导致汽车在刹车过程中的不稳定,并且容易翻车,造成危险,而ABS系统是一种车轮防抱死装置,它可以大大地缩短制动距离,保持汽车转向的稳定性[2]。在突发情况下,其效果更加显著。在Matlab中进行仿真试验,有利于避免危险,而且结果更加直观。
1 ABS系统设计思路
在Simulink中建立ABS系统仿真模型,其间需要对各个模型进行建立,再对相应的参数进行定义,参数的定义要符合实际,模拟实际环境进行系统仿真,得出结论并进行分析。
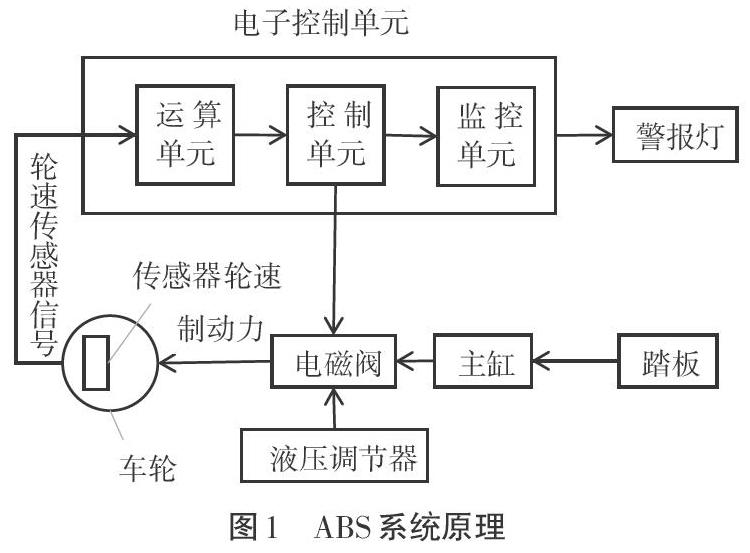
汽车ABS系统的工作原理如图1所示,轮速传感器进行轮速监测,并将测得的信号传递到电控单元中进行计算、分析,传递指令到电磁阀,控制电磁阀的开闭进行车轮轮缸压力的调节,使车轮的滑移率处在最佳范围内。
根据ABS系统的工作原理,要针对制动系统、轮胎、滑移率计算模块、制动器等建立数学模型。本文主要比较采用不同控制器的ABS系统的制动效果差异。本文选用的是Bang-Bang控制和PID控制,这两种控制技术都是基于滑移率的控制技术。
2 汽车ABS系统模块
2.1 仿真系统参数的定义
人们需要根据模型对参数进行定义,明确家用小型轿车的各个基本参数,如表1所示。
2.2 车辆动力学模型
众所周知,汽车相关动力学模型的建立过程十分耗时且复杂,本文采用经典的单轮车辆模型。本设计进行如下设想:每个轮子受力均匀且汽车在平坦的路面上行驶;忽略行驶时风对车的阻力和车轮滚动时的阻力;假设车轮载荷为常数[3]。正常行驶时,汽车是用车速相应的初始角速度转动车轮的,由式(1)可以得出:
[slip]有以下规律:当[slip]=1时,车轮为单纯的滑动,即纯滑动;当[slip]=0时,则刚好相反,此时车轮为纯滚动。[slip]达到期望值时,制动效果最好,可以缩短制动距离。
下面建立数学模型,如图2所示。
由式(6)可知,摩擦系数[μ]为滑移率[slip]的非线性函数。其模型如图3所示。
2.3 轮胎模型
本设计在固定路况下进行研究。本文采取双线性轮胎模型,通常使用式(7)来表示。
2.4 Bang-Bang控制模块
Bang-Bang控制通过在系统中设置阈值达到控制目的,所以设置阈值为0和1,即添加一个常数模块,Bang-Bang控制器通过输入值与阈值比较进行输出。所以,添加一个inport模块、两个比较模块,分别为大于和小于。因为输出数据类型为双精度,所以比较模块后分别添加一个double模块来转换数据类型。最后添加一个求和模塊,求和并输出至下一个环节,其仿真模块如图4所示。
2.5 PID控制模块
本文采用典型的PID控制器,[P、I、D]三个参数的修改可以表示其控制功能。为了保证仿真界面的整洁,控制器模块采取封装处理。根据式(8),先添加一个输入模块,其输入量为滑移率的偏差[e(t)],再分别添加增益模块[Kp]、[Ki]、[Kd]。[Ki]是积分控制,所以该模块后需要添加一个积分模块[1/S]。[Kd]是微分控制,同理需要添加一个微分模块。再将[Kp]、[Ki]、[Kd]三者求和后输出至下一个环节,即需要添加一个求和模块,并将输入改成3个信号输出,输出量为控制信号[u(t)],[Kp]、[Ki]、[Kd]利用参数整定来确定其取值。建立PID控制器仿真模块,如图5所示。
2.6 汽车ABS系统仿真模型
结合所建立的各种模型,组成一个汽车ABS系统仿真模型。该模型可以输出车速、制动时间、滑移率这三个变量,通过这三个变量的比较,可以分析Bang-Bang控制和PID控制的优劣。系统仿真模型如图6所示。
3 仿真结果及分析
下面主要对结果进行分析,其间采用Bang-Bang控制器的ABS系统和PID控制器的ABS系统,重点分析两种系统的优劣,然后得出结论。
3.1 采用Bang-Bang控制器的ABS系统
采用Bang-Bang控制器的ABS系统仿真曲线如图7所示。
采用Bang-Bang控制器的ABS系统仿真曲线如图7所示。从图7(a)可以看出,在踩下刹车踏板时,其汽车行驶速度变化是先缓慢下降,再均匀下降。其车轮转速的变化是随时间的增加先慢慢下降,然后加速下降,再回升,形成多个振荡。其振荡持续到13.63 s,即车轮转速就变为0。而汽车停车的时间为14.01 s,其间有0.38 s的时间处于车轮的纯滑动,此时车轮不转动,且车速不为0,滑移率为1。具体数值如表2所示。
Bang-Bang控制下的滑移率变化曲线如图7(b)所示,从图中可以看出,滑移率先随时间的增加而增大,在5 s后,其滑移率先增大再减小,不断重复,形成振荡。本文设定期望滑移率的值为0.2,从图7(b)可知,实际滑移率在期望值的上下反复波动,其波动与车轮转速的波动相似。到了13.63 s时,轮速为0,车速不为0,此时车轮为纯滑动,滑移率突升到1,并持续到汽车停下。具体数值如表3所示。
3.2 采用PID控制器的ABS系统
采用PID控制器的ABS系统仿真曲线如图8所示。
采用PID控制器的ABS系统仿真曲线如图8所示。由图8(a)可知,车速的曲线和Bang-Bang控制器的曲线相差不大。该系统的轮速曲线先下降,在回升形成一个振荡;经過一段时间,又形成一个振荡。其振荡较Bang-Bang控制有较大区别。它的第一个波动较大,第二个波动较小。由图8可知,轮速振荡是一个衰减的过程,第一个波峰高度为13.01,第二个波峰高度为3.018,可知两波峰之间的距离比约为4.31∶1.00,符合PID参数整定规律。轮速和车速为0的点为同一点,即在车轮停止转动的同时,汽车的速度为0,该系统在曲线中不存在纯滑动过程。具体数值如表4所示。
PID控制下的滑移率变化曲线如图8所示,其滑移率和轮速相似,为衰减曲线。实际滑移率在期望滑移率的上下波动,但是其波动越来越小,即越来越靠近期望滑移率。其第一个波峰高度为0.412 6,第二个波峰高度为0.087 1,可知两波峰之间的距离比约为4.74∶1.00,符合PID参数整定规律。在13.15 s时,汽车停下,此时曲线发散。具体数值如表5所示。
4 结语
本文在Matlab的Simulink工具箱中进行汽车ABS系统建模,先后介绍了车辆动力学模型、轮胎模型、Bang-Bang控制模块、PID控制模块。其间分别建立模型,再配置参数,使其符合实际,使得仿真更加准确。在其他条件相同的情况下,本文通过制动时间、滑移率、车速的变化来比较分别采用两种控制器的ABS系统,并且得出结论。采用PID控制的ABS系统不存在抱死时间,而采用Bang-Bang控制的ABS系统有0.38 s的抱死时间,所以,相对于ABS系统来说,PID控制优于Bang-Bang控制。
参考文献:
[1]艾江.汽车防抱死制动系统电控单元的设计[J].重型汽车,2017(6):22-25.
[2]梁燕.汽车防抱死制动系统的技术研究[J].内燃机与配件,2019(12):3-4.
[3]姜宏霞,刘垚均,张涵.基于CarSim与Simulink车辆防抱死系统仿真分析[J].时代汽车,2018(6):108-109.
