面向Sentinel-2影像的LBV和K-T变换水体信息提取模型
2020-12-05李健锋叶虎平张宗科魏显虎
李健锋, 叶虎平, 张宗科, 魏显虎
(1.陕西地建土地工程技术研究院有限责任公司,西安 710021;2.中国科学院遥感与数字地球研究所,北京 100094;3.中国科学院中国-斯里兰卡水技术研究与示范联合中心,北京 100085;4.陕西省土地工程建设集团有限责任公司,西安 710075;5.中国科学院地理科学与资源研究所 资源与环境信息系统国家重点实验室,北京 100101)
0 引言
随着航空航天技术的快速发展,遥感技术为资源调查、环境监测、区域分析和全球宏观研究等诸多领域提供了先进手段[1-3]。快速、准确地从遥感卫星影像中提取水体信息对水资源调查、流域规划、水资源的监测与保护具有重要的意义[4-5]。
近年来,针对不同卫星传感器的影像提取水体,国内外学者开展了广泛的研究。Shih[6]基于Landsat MSS影像的近红外波段,采用密度分割法,有效提取了平原地区的水体信息。周成虎等[7]研究发现,TM影像中水体具有独特的谱间关系特征,即(TM2+TM3)>(TM4+TM5),该方法特别适合山区水体的提取。Mcfeeters[8]根据TM2与TM4波段间的关系,提出了归一化水体指数(normalized difference water index,NDWI)提取模型,该模型可以有效抑制土壤和植被信息,但难以抑制建筑物信息;徐涵秋[9]在NDWI基础上,提出改进的归一化水体指数(modified NDWI,MNDWI),尤其在城市水体提取方面,MNDWI表现出了较高的精度。Zhang等[10]针对Landsat-8 OLI影像,提出了基于LBV变换的地表水体提取方法,并与NDWI、MNDWI和AWEI提取结果相比,具有更好的精度。张景奇等[11]利用TM影像经K-T转换后水体的绿度(greenness)分量和第四分量小于湿度(wetness)分量的特征,有效地对水体信息进行了提取。Sentinel-2卫星是欧盟委员会(European Commission,EC)和欧洲航天局(European Sapce Agency,ESA)共同倡议的全球环境与安全监测系统“哥白尼计划”中的第二颗卫星。Sentinel-2卫星的主要任务是对全球陆地表面进行高分辨率多光谱成像,分为2A和2B 2颗卫星。相比于Landsat-8卫星影像,Sentinel-2影像拥有更高的空间分辨率和时间分辨率[12]。虽然国内外学者针对不同传感器提出了许多水体提取模型,但这些模型在复杂的水体环境下,提取精度普遍不高,无法有效地消除云阴影、山体阴影及水田泥地对水体提取精度的影响,存在一定的误分现象。“21世纪海上丝绸之路”沿线国家斯里兰卡位于南亚次大陆南端,受印度洋季风系统的影响,导致强降雨一年中在该地区系统性地迁移,存在明显季节性缺水,水资源时空分布十分不均衡[13]。地表水体面积精确提取是评估水资源量的一个重要手段。斯里兰卡属于热带地区,近中午前后常有各种云覆盖,致使对地观测卫星过境影像常年受云雾覆盖及云阴影影响,并且斯里兰卡有很多种植水稻的水田,收割完水稻的泥地与水体的光谱特征较为接近,也增加了遥感图像水体提取的难度。
本文选取斯里兰卡中东部为研究区,推导了用于Sentinel-2影像的LBV变换方程,在分析了水体与植被、建筑、阴影等典型地物经LBV和K-T变换后特征的基础上,提出了基于LBV和K-T变换的水体提取模型,实现了复杂水环境下水体的精确提取,并与水体指数法(NDWI、MNDWI)的提取结果进行了对比分析。
1 数据与方法
1.1 研究区数据
本文以斯里兰卡中东部为研究区,研究区东部沿海,西南部为高山地区,区内环境复杂且影响水体提取精度的因素较多,包含湖泊、水库、坑塘、瀉湖、河流等多种类型的水体。研究区Sentinel-2假彩色(8、4、3波段)合成图像如图1所示。实验选取覆盖研究区2018年9月的1景Sentinel-2B影像,含云量为33.92%,主要集中在图像的东南部分。利用SNAP软件和Sen2Cor插件对影像进行辐射定标、大气校正以及裁剪处理。

图1 研究区Sentinel-2假彩色合成图像(8、4、3波段)
1.2 研究方法
1) Sentinel-2影像的LBV变换。LBV变换是由Zeng[14]提出的一种通用的光学遥感数据变换方法。LBV从地物的物理意义出发,分析不同典型地物在多光谱影像上辐射值的变化,总结出地物的3个主要辐射特性:地物总辐射水平L(general radiance level)、地物可见光-红外光辐射平衡B(visible-infrared radiation balance)和地物辐射随波段变化的向量-方向和速度V(band radiance variation vector-direction and speed)。LBV变换的输入波段组合和方程随卫星的不同而不同。
根据Sentinel-2A影像的波段特征并参考文献[10],选取3(green)、4(red)、8(NIR)和11(SWIR)波段作为输入波段组合,其LBV变换方程可通过线性回归和二次回归得到,其过程如式(1)~式(3)所示。
(1)
(2)
(3)

地物可见光-红外光辐射平衡B的变换方程通过线性回归推导,采用二次回归进行推导L和V的变换方程。根据公式(2)和λi可得到式(4)~式(7)。
R3=a+0.559 8b+0.559 82c
(4)
R4=a+0.664 6b+0.664 62c
(5)
R8=a+0.832 8b+0.832 82c
(6)
R11=a+1.613 7b+1.613 72c
(7)
确定3个方程求解二次回归中3个未知的系数,如式(8)~式(10)所示。
(8)

(9)

(10)
结合式(4)~式(10)得到二次回归方程系数,如式(11)~式(13)所示。
a=4.408R3+0.394 9R4-4.367 6R8+0.564 7R11
(11)
b=-8.437 1R3+0.049R4+10.057R8-1.669 2R11
(12)
c=3.538 3R3-0.187 4R4-4.552 2R8+1.201 4R11
(13)


(14)
线性回归的推导类似与二次回归,最终得到线性回归方程系数如式(15)~式(16)所示。
m=0.730 3R3+0.589 7R4+0.364R8-0.684R11
(15)
n=-0.523 4R3-0.370 2R4-0.124 2R8+1.669 2R11
(16)
地物可见光-红外光辐射平衡B定义为线性回归的斜率负值[13],B的表达式如式(17)所示。
B=-n=0.523 4R3+0.370 2R4+
0.124 2R8-1.669 2R11
(17)
地物辐射随波段变化的向量-方向和速度V定义为二次回归的组合残差[13],V的计算过程如式(18)~式(19)所示。
(18)
V=-v3+v4-v8+v11=0.741 1R3-
1.338 7R4+0.626 7R8-0.029 1R11
(19)
式(14)、式(17)和式(19)为Sentinel-2A影像的LBV变换方程,同理可推导出Sentinel-2B影像的LBV变换方程,如式(20)所示。
(20)
2) Sentinel-2影像的K-T变换。K-T变换(又称穗帽变换)是一种特殊的主成分分析,由Kauth和Thomas于1976年提出,通过旋转坐标空间使坐标轴指向与特征密切相关的方向,特别与植物生长过程和土壤密切相关[15]。K-T变换有助于对作物性状进行解释和分析,具有重要的现实意义。K-T变换的第一分量亮度(brightness)表示地物总的辐射能量水平,第二分量绿度(greenness)反映植被的生长状况,第三分量湿度(wetness)反映了地物的湿度信息,对土壤湿度信息最为敏感,是较好的水体信息识别的特征波段。Nedkov[15]在2017年推导了Sentinel-2影像K-T变换的亮度、绿度和湿润度指标的变换系数。
2 结果与讨论
2.1 典型地物光谱特征分析
在研究区内针对水体、植被、建筑、阴影和水田泥地5种地物分别选取50个样本,统计其在Sentinel-2B影像中2(blue)、3(green)、4(red)、8(NIR)和11(SWIR)波段的反射率均值,得到典型地物的光谱特征曲线如图2所示。从图2可以看出,在可见光波段,水体的反射率在蓝色和绿色波段较高,红色波段较低。在近红外和短波红外波段,水体反射率较低,几乎所有入射能量都被吸收。水体反射率呈递减的趋势,即:蓝波段>绿波段>红波段>近红外波段>短波红外。影像中阴影的光谱特征与水体极为相似,二者的反射率在红波段相交,在其他波段较为接近,区分度较低。研究区内主要存在山体阴影和云阴影,影响水体提取的精度。水田泥地含水量高,整体的反射率较低,在遥感影像中呈暗色调,会对水体的提取结果产生一定的影响。建筑和植被的光谱响应曲线与水体差别较大,易于区分。

图2 典型地物光谱响应曲线
2.2 基于LBV和K-T变换的水体提取模型
针对处理后的实验区Sentinel-2B影像,根据推导出的LBV变换方程和K-T变换系数[15],基于IDL 8.5平台编译Sentinel-2B影像的LBV和K-T变换算法,得到研究区的LBV和K-T变换影像,分别统计典型地物经LBV和K-T变换后的波谱采样均值,如图3所示。
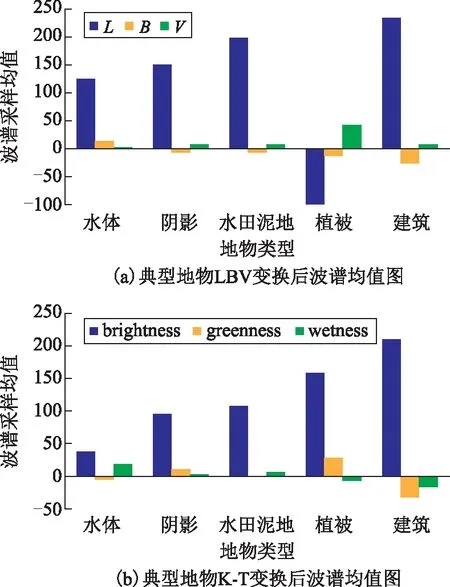
图3 典型地物LBV和K-T变换后波谱均值直方图
由图3(a)可以看出,水体经LBV变换后L波段波谱采样均值与阴影、水田泥地的波谱采样均值较为接近,植被的波谱采样均值最低;水体B波段波谱采样均值最高,为13.09,其他4种典型地物B波段的波谱采样均值均为负值;5种典型地物V波段波谱采样均值整体较为接近,其中植被的波谱采样均值最高。分析5种典型地物经LBV变换后各波段之间的关系发现,只有水体经LBV变换后的波谱采样均值呈现出B>V的特征,植被、建筑、阴影和水田泥地等地物均呈现出B
由图3(b)可以看出,水体经K-T变换后brightness(亮度)波段波谱采样均值最小,为39.29,与其他典型地物相差较大;阴影、水田泥地和水体brightness(亮度)波段波谱采样均值较为接近,均趋于0;5种典型地物wetness(湿度)波段的波谱采样均值差异明显,水体的最大,为19.54。因此,根据水体在brightness和wetness波段与其他典型地物差异明显的特点,通过对K-T变换后的图像进行多尺度分割确定brightness波段的阈值为75,wetness波段的阈值为11,进行水体信息的提取,提取结果如图4(c)所示。相比于利用LBV变换后波段B的灰度值>波段V的灰度值的水体提取结果,brightness和wetness波段阈值法水体提取的结果有效地消除了云、阴影以及水田泥地的影响,但存在水体与部分植被的混分现象,特别是水体附近的植被。
综上所述,K-T变换brightness和wetness波段阈值法的水体提取结果能有效地消除云、阴影以及水田泥地的影响,利用LBV变换波段B的灰度值>波段V的灰度值能有效地区分水体与植被。因此,结合2种方法,建立如式(21)所示的水体提取模型。
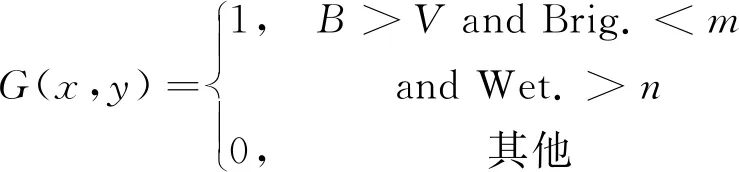
(21)
式中:G(x,y)表示图像水体提取后的二值化影像;1表示为水体;0表示为非水体;B和V分别表示图像经LBV变换后的B波段和V波段;Brig.和Wet.分别表示图像经K-T变换后的brightness和wetness波段;m和n分别为brightness和wetness波段的阈值。
2.3 研究区水体提取模型比较
基于IDL 8.5平台,对预处理后的研究区Sentinel-2B影像分别进行LBV转换和K-T转换,并合成为6波段图像(包含L、B、V波段和brightness、greenness、wetness波段),利用本文提出的基于LBV和K-T变换的水体提取模型进行水体的提取。通过对K-T变换后的图像进行多尺度分割确定brightness波段阈值设为75,wetness波段阈值设为11,进行水体信息的提取,提取结果如图4(d)所示。为了进一步对比分析基于LBV和K-T变换的水体提取模型提取精度,采用水体指数法(NDWI、MNDWI)进行水体提取,通过大津法(Otsu)[16]确定NDWI阈值为-0.002 7,MNDWI阈值为0.008 4,提取结果如图4(e)和图4(f)所示。通过提取结果与影像叠加对比分析发现,在研究区的东南有云部分,NDWI和MNDWI水体提取模型提取精度较差,存在严重的误分现象。NDWI模型的提取结果主要存在云阴影和水田泥地误分为水体的现象;MNDWI模型的提取结果主要存在云和水田泥地误分为水体的现象。在研究区的西南高山区,NDWI模型将一部分山体阴影误分为水体。在研究区的无云平原区,NDWI和MNDWI模型提取精度较高,能比较准确地提取出水体的边界。基于LBV和K-T变换的水体提取模型在整个研究区内都表现出了较高的精度,有效地消除了云、云阴影、山体阴影和水田泥地的影响。

图4 不同模型水体提取结果图
为了进一步对比分析3种模型的提取结果,以研究区水体的目视解译结果为基准,在研究区内选取200个样本,包括100个水体样本和100个非水体样本,通过计算混淆矩阵[17],分别从漏提率、误提率和总体精度3个方面反映水体的提取精度,其统计结果如表1所示。从表1中可以看出,NDWI和MNDWI水体提取模型的误提率较高,存在明显的非水体提取为水体的现象,总体精度较低,均低于90%,同时也存在一定的漏提现象。基于LBV和K-T变换的水体提取模型总体精度最高,达到了98.13%,存在少量的漏提和误提现象。
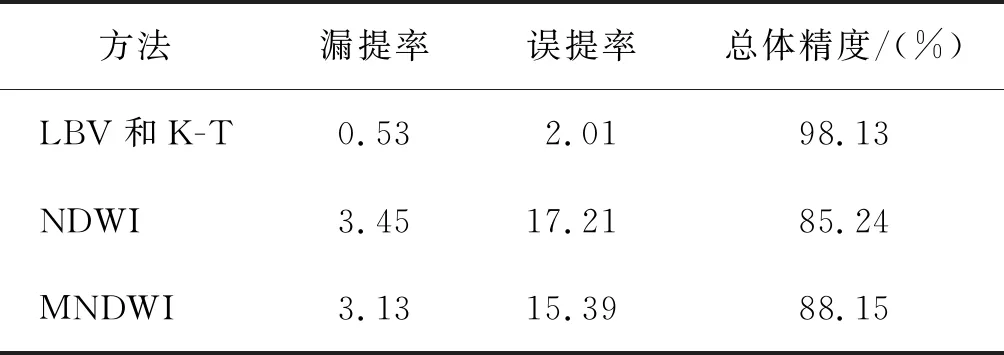
表1 3种水体提取方法的精度对比
3 结束语
本文推导了用于Sentinel-2影像的LBV变换方程,以水环境复杂的斯里兰卡中东部为研究区,在分析了水体与植被、建筑、阴影等典型地物相比经LBV和K-T变换后特征的基础上,提出了基于LBV和K-T变换的水体提取模型,从目视判读与定量分析2个角度评价了本文模型与NDWI、MNDWI模型提取水体的精度,发现基于LBV和K-T变换的水体提取模型总体精度最高,达到了98.13%,NDWI和MNDWI 模型的总体精度较低,低于90%,存在较为明显的误提现象。NDWI模型将一部分云阴影、山体阴影和水田泥地误分为水体,MNDWI模型将一部分云和水田泥地误分为水体,同时2个模型还存在一定的漏提现象。总地来说,相比于NDWI、MNDWI模型,基于LBV和K-T变换的水体提取模型实现了复杂水环境下水体的精确提取,有效地消除了云、云阴影、山体阴影和水田泥地的影响。
本文提出的基于LBV和K-T变换的水体提取模型,实现了斯里兰卡中东部地区水体的精确提取,为在复杂水环境下水体的精确提取提供了有效的解决途径,对水资源调查、监测与保护有重要的现实意义。但模型阈值的选取需要对图像进行多尺度分割后人工确定与干预,尚未实现自动化水体的精确提取,在后续的研究中应聚焦于阈值的自动确定,实现复杂水环境下水体的自动化精确提取。
