一种轮胎式龙门吊纠偏避障的方法
2020-12-04石顺锋张芃欣
石顺锋,张芃欣
(上海普适导航科技股份有限公司,上海 201702)
0 引言
轮胎式龙门吊,简称为轮胎吊,广泛用于在集装箱码头堆场进行装卸作业,是码头港口交接集装箱必不可少的装卸设备。
为了充分利用竖向空间,在集装箱的堆置过程中,一般都会在一列叠置多个集装箱。轮胎吊运行速度比较快,加上没有固定的轨道,且本身体型庞大,惯性较大,因此对司机的操作有着很高的要求。
轮胎吊作业过程中,若门腿缸机构变形、轮胎的胎压不一致或者两边胎压负载不一样,将会导致轮胎吊的海侧和陆侧行走速度不一致,从而导致大车走偏。目前,一般在两侧的驱动电机上分别安装编码器,以检测驱动电机的实际转速,继而获取大车的行走速度,从而判断大车是否走偏。然而,当大车走偏是由两侧的负载不一致或两侧轮胎的胎压不一致而引起时,此种方式将检测不出大车走偏,从而存在轮胎吊由于行走偏离过大而撞上滑触线的安全隐患。
为了避免轮胎吊行走偏差造成的安全事故,司机必须在进行长距离的运行中,时刻注意对大车行走的方向进行纠偏。而为了满足港口的需求,轮胎吊逐渐向着快速化和大型化方向发展,大车的操作难度越来越高,大车运行中纠偏操作的精准性也更加重要。
随着自动化技术的发展,轮胎吊自动纠偏和避障已成为趋势。本文以基于北斗高精度RTK、广视距毫米波雷达组合方式实现轮胎式龙门吊的自动纠偏和自动避障。
1 自动纠偏应用
在轮胎吊上安装北斗接收机和扼流圈天线等装置:一是在轮胎吊顶端对角部署北斗接收天线并连接到接收机,建立北斗RTK移动站;二是轮胎吊的接收机在进行北斗信号观测的同时,也接收CORS系统发出的改正数,由北斗接收机传输位置信号给纠偏结算终端,终端解算偏移方向与偏移量,并与PLC进行双向通信,从而对轮胎吊的运行轨迹进行修正,从而完成纠偏。原理示意图如图1所示。
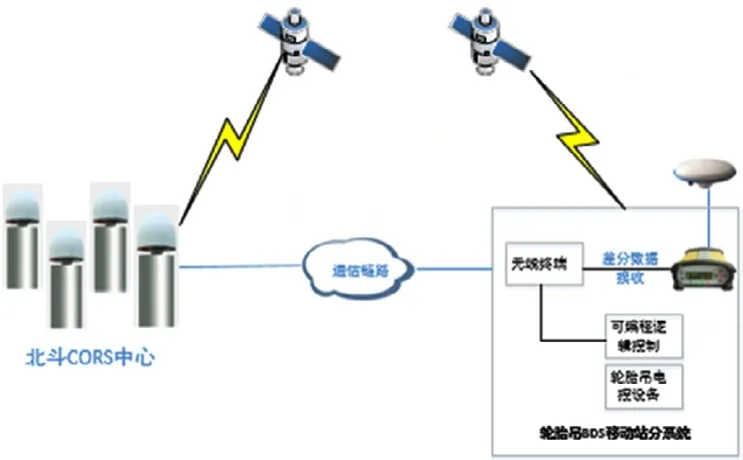
图1 轮胎吊高精度位置服务原理示意图
1.1 硬件部署
为了让天线尽可能少的受到多路径的影响,将扼流圈天线支架安装在轮胎吊顶部不受遮挡的开阔区域,并将北斗RTK天线安装在适当的位置;在轮胎吊电气房内部署北斗RTK接收器,将接收机接入北斗纠偏系统控制器(纠偏解算终端)中,并与轮胎吊顶端的北斗RTK天线利用天线电缆进行连接;在接收机部署的位置和天线接入电气房的位置串接避雷设备,防止雷暴天气对设备造成影响(见图2)。
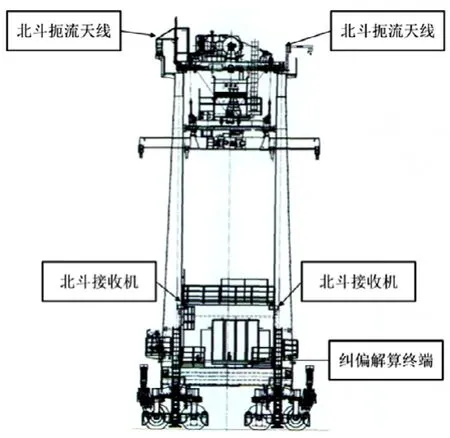
图2 轮胎吊上移动站部署位置
1.2 纠偏原理
通过控制轮胎吊两侧驱动轮的速度,让轮胎吊海侧和陆侧轮胎之间形成速度差,利用双轮差速的运动模式调整大车的运动方向,达成纠偏的效果。如图3所示。

图3 轮胎吊自动纠偏流程
由可编程逻辑控制器计算出由大车当前运行速度值按照一定的比例转换得到的给定量,将计算得到的给定量传递给用于调整轮胎速度的变频器,根据给定量对变频器进行调整。在进行调整的过程中,电机和对应的给定值根据不同的运行方向都具有正负的选择,在控制器的程序里,大车运行速度也会因运行方向的区别具有正负的标识,电机和给定值的正负根据反馈的大车速度的正负情况来进行判断。
1.3 应用步骤
使用高精度测绘对轮胎吊的车道进行事先的标定,将安装的两个北斗RTK天线所连接成的直线看作轮胎吊行驶过程中的实际位置线,将大车的实际位置线和理论位置线(车道线)在一定的运算处理后进行对比,便能够得到大车运行方向的偏移情况,并根据一定的运算得到纠偏方向和纠偏量。
(1)确定纠偏方向:如果大车行走的位置线与车道线重合,说明轮胎吊正按照标定的路线行驶,没有发生偏移,否者,就说明轮胎吊的运行路线已经偏离了车道线,需要进行纠偏。如果大车行驶路线与车道线存在偏移,就可以根据大车实际位置线两端与车道线偏移的距离,再结合在编程逻辑控制器中解算得到的大车行驶方向,就可以得到大车行驶的偏移方向,从而确定进行纠偏的方向。
(2)计算纠偏量:如果大车行驶路线与车道线存在偏移,就计算出位置线两端与车道线偏移的距离。将偏差量与编程逻辑控制器中解算出的大车行驶方向和行驶速度相结合,便可以根据事先设计好的PID控制模型计算出实际的纠偏量。
RTK接收机接入CORS系统,可得到厘米级精度的定位结果。将定位结果通过高斯投影,转换为平面坐标。

图4 大车模型
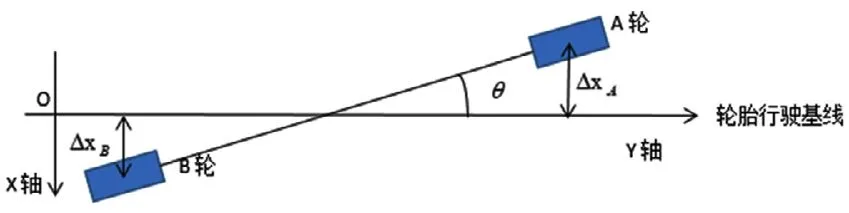

根据定位的前后位移计算当前行驶速度v,正负由y坐标变化决定,计算当前速度垂直于行驶基线的分量的速度vxk,根据速度平滑和当前垂直于行驶基线的分量的速度,对理想的纠偏速度进行限制,如果vx在限制范围内,则下一时刻理想的纠偏速度就等于vxk,否则取范围内最接近vxk的值。
(3)传输纠偏数据:在得到纠偏方向和纠偏量后,自动纠偏系统控制器将两者进行整合,形成带有正负号的单一数据,并将整合后的数据发送给可编程逻辑控制器。数据的绝对值为计算得到纠偏量,正负号表示进行纠偏的方向。
(4)自动纠偏:可编程逻辑控制器获得纠偏数据后,按照数据的整合规则,提取数据的绝对值和正负号,转变为纠偏量和纠偏方向。再将纠偏量转换为驾驶的给定值,并根据纠偏方向判断需要进行给定量调整的变频器,将给定值传送给相对应的电机,由电机对轮速进行调整,完成自动纠偏。
(5)程序指令优先级:考虑到自动纠偏系统出现失效或故障的可能,在实现自动纠偏系统的同时,还保留手动纠偏的功能,且手动纠偏功能的优先级要高于自动纠偏系统。在驾驶过程中,如果司机发现自动纠偏功能出现问题,可以立即切换为手动纠偏进行驾驶,以确保行驶的安全。
2 自动避障应用
毫米波雷达能够快速、准确地监测周围障碍物的距离和角度,适应雨、雪、雾、霾、沙尘等各种恶劣天气,具备全天候、全天时的工作特性。使用毫米波雷达系统,提供智能避障预警,可辅助轮胎吊安全驾驶。
在轮胎吊四个门腿上,安装24GHz短距毫米波雷达和77GHz中距毫米波雷达,用于监测周围集装箱堆场上的集装箱等障碍物,测量距离和角度。同时也在轮胎吊安装高清摄像机,通过信号传输线缆,将雷达数据流和监控视频流传输到5G边缘智能网关处理,实时解算障碍物的安全距离,并将解算结果输出至驾驶室管理系统终端和警报器,提供必要的避障预警。最后,雷达数据流、监控视频流和解算分析结果,可通过5G通信技术实时传输到中心服务器,为未来远程化、无人化驾驶奠定技术基础。
可分为以下几个步骤实施:
(1)部署毫米波雷达系统,将24GHz短距毫米波雷达和77GHz中距毫米波雷达安装在轮胎吊门腿,分别监测门腿的侧面方向和前后方向。
(2)部署视频监控系统,将高清摄像机在轮胎吊门腿,监控四个方位区域,所有视频流集中到NVR统一管理。
(3)根据雷达数据流和监控视频流,5G边缘智能网关实时解算轮胎吊周围障碍物的安全距离,分析研判当前驾驶方向的障碍物安全指数,并将解算结果输出至驾驶室管理系统终端;若结果低于安全指数阈值,立即触发警报器避障预警。
为了保证每一侧轮胎吊的最大监测角度,在轮胎吊的两端分别安装了2套77GHz中距毫米波雷达和4套24GHz短距毫米波雷达,实现全方位测量周围障碍物的角度和距离。
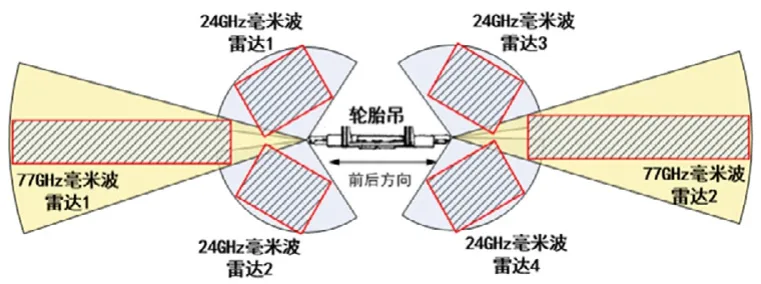
图5 毫米波雷达安装角度示意图
当进入堆场后,轮胎吊的左右两侧毫米波雷达便可检测到堆场内集装箱的侧面以及集装箱之间的缝隙。在轮胎吊行走过程中,若轮胎吊跑偏,毫米波雷达检测到集装箱侧面的距离就会变大或变小,经过5G边缘智能网关分析处理,便可知道轮胎吊是否偏离车道规划线或轮胎吊的轮胎转向是否偏离车道规划线。
当轮胎吊偏离道规划线在一定的小范围内时,5G边缘智能网关自动降低安全指数,输出轻度避障预警到驾驶室管理系统终端,提醒司机及时调整;若低于安全指数阈值,5G边缘智能网关立即触发严重避障预警,并联动中心服务器的指挥中心报警。
3 结束语
综上所述,基于北斗RTK差分定位的轮胎吊自动纠偏系统,可完全满足轮胎吊日常运行过程中的自动纠偏需求。基于毫米波雷达的自动避障系统,可实时监测轮胎吊行进路线上堆放的障碍物,辅助轮胎吊跑偏检测,及时预警。该系统可大大降低轮胎吊日常使用过程中的安全事故率。
