脉冲压缩雷达多普勒距离耦合校正简便方法
2020-11-30胡浩隋英豪梁冰刘震曹淑魏
胡浩 隋英豪 梁冰 刘震 曹淑魏


摘 要:对具有多普勒頻移的雷达线性调频回波信号的距离-速度耦合性进行了分析,通过MATLAB对其进行了仿真。
关键词:多普勒频移 距离-速度耦合
1 引言
雷达探测的目标一般都是运动的目标,它和目标的相对运动速度有的可以达到两倍音速以上。比如对火箭卫星的跟踪,由于运动造成的多普勒效应,雷达接收信号频率将会改变。因此对线性调频脉压的多普勒性能进行分析非常重要。
2 具有多普勒频移线性调频脉冲信号
雷达线性调频发射信号的复数表达式为:
由上式可以看出,多普勒效应将使线性调频信号的检波输出信号发生近似整体平行频谱搬移,所有频谱分量将位移约。在脉压卷积时,由于该频谱搬移,将使输入信号提前(为正)或滞后(为负)与匹配滤波器发生部分匹配。由此使脉压输出信号在时域相应发生提前或滞后位移,从而带来雷达测距误差,同时输出信号的幅度也将发生变化。
3 MATLAB仿真
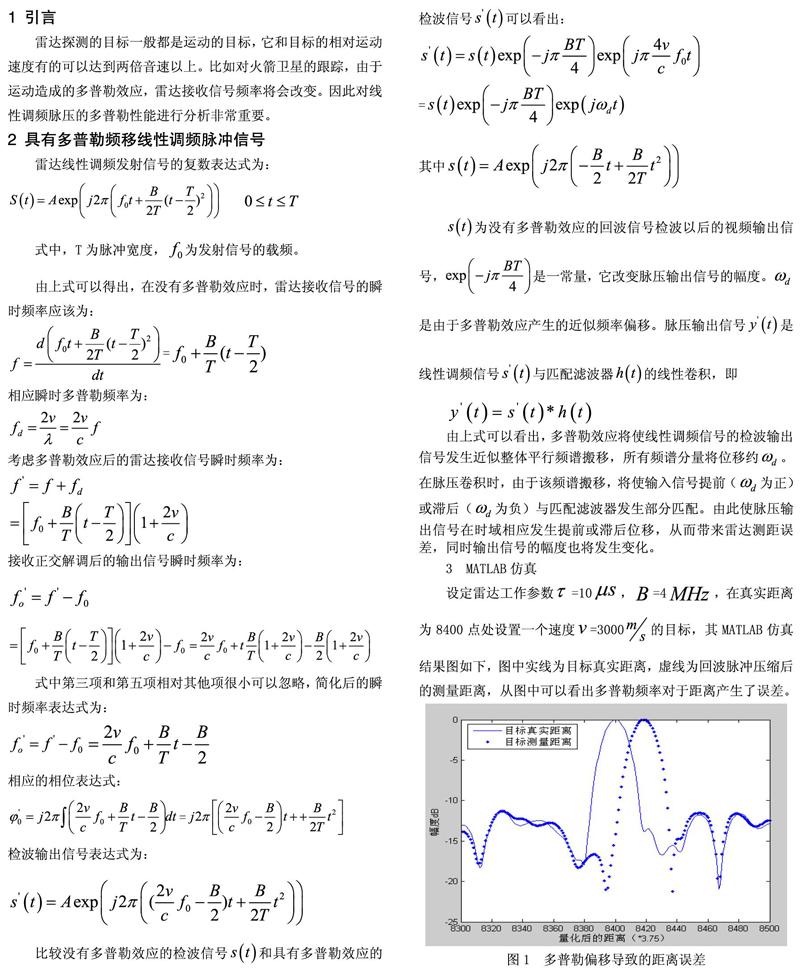
设定雷达工作参数=10,=4,在真实距离为8400点处设置一个速度=3000的目标,其MATLAB仿真结果图如下,图中实线为目标真实距离,虚线为回波脉冲压缩后的测量距离,从图中可以看出多普勒频率对于距离产生了误差。
对速度进行补偿是非常必要的。
上图中点状表示存在多普勒效应时的线性调频数字脉冲压缩仿真结果,可见回波信号有多普勒频移,由于线性调频信号的距离、多普勒耦合现象,要实现精确跟踪必须对目标的多普勒频率进行补偿,进行多普勒补偿同时可以减少脉压损失,降低距离旁瓣。
4:多普勒速度补偿
1:实现步骤
(1)雷达对粗距离精度(下变频后的数据抽取成5MHz )数据经CFAR处理后,如果连续8个PRF内在同一距离带(240m范围)上检测到目标,则判定为该距离上有目标,雷达获得此目标距离,把该距离值送往FPGA,作为距离引导数据(供距离选通和测距用)。
(2)根据距离引导数据,在高距离精度(下变频后的数据抽取成20MHz)数据上截取目标所处的数据段(左右 400个数据,共800个20MHz的数据,相当于选通),作为距离选通数据。
(3)把(2)得到的距离选通数据进行脉压(MTI)后,根据距离引导数据在选通门数据上找幅度值最大点(210m范围)所对应的距离,作为跟踪基准距离。雷达转为距离跟踪模式,对目标跟踪75个PRF后,根据距离微分,求出目标径向速度。
(4)根据(3)所得的目标径向速度和(1)得到的距离引导数据,分别对粗距离精度数据和选通数据进行脉压补偿,补偿因子为
(5)重复以上步骤,进行距离跟踪。
5 MATLAB仿真分析
我们采用MATLAB对ML3112雷达设置了不同速度的目标进行仿真,得出了速度和多普勒距离误差大致关系如下表:
从上表可以看出目标速度小于400,其多普勒带来的距离误差不超过8米。
我们采用ML3112雷达相关参数进行了如下的MATLAB 仿真。
雷达工作时宽=10,带宽=4,目标的起始速度=3000,加速度为20,起始距离为4,运行8000个PRF后,目标距离为37,速度为3396,从从仿真结果可以看出,采用了方案一的补偿方法后,目标的测量距离和真实距离的误差小于8米,在均方根以后远小于8米;测量速度和真实速度的误差小于200,因此满足M3112雷达测距8米的精度。
作者简介:
狄中泉 2003年毕业于西北工业大学 ,现从事雷达信号处理工作。
王山川 2007年毕业于西北工业大学 ,现从事雷达信号处理工作。
