电动汽车整车控制器故障诊断系统
2020-11-30尤庆伸陈信强沙文瀚刘琳方祥建
尤庆伸 陈信强 沙文瀚 刘琳 方祥建
摘要:整车控制器作为电动汽车核心零部件,承担了整个系统的能量分配、扭矩管理、故障诊断等功能;本文详细分析整车控制器各种故障类型、故障代码、等级分类及显示的方法,并根据故障等级,整车控制器采取相应故障动作。
关键词:电动汽车 整车控制器 故障诊断
引言
由于我国电动汽车工业起步比较晚,整车控制器控制策略相对简单,故障诊断方面经验不足,故障率非常高,但维修人员对电动汽车的认知程度低,而且电动汽车高压危险性大。整车控制器故障诊断系统可以提高客户对电动汽车的认知,故障代码有助于维修人员准确、快速找出故障点,整车控制器对故障代码的分类和处理能够提高电动汽车行驶的安全性。因此,完整的整车控制器故障诊断系统是电动汽车车辆维修和车辆安全的保证。
本文分析了电动汽车整车控制器故障诊断思想,形成一套完整的诊断故障系统,根据其性质和危害性进行等级分类,并且通过仪表显示,最终整车控制器根据故障等级采取相应的安全措施。
1、整车控制器故障诊断
整车控制器是电动汽车的核心部件之一,承担着为所有部件分配任务,协调所有部件有序运行,并且保证整车安全行驶的功能。根据故障信息的不同整车控制器将故障分为:模拟信号输入故障、数字信号输入故障、数字信号输出故障、CAN数据故障共四类故障。当这四类故障发生时又根据具体的诊断机制作出相应的故障动作并生成标准的故障码,通过诊断设备可以快速读取故障码信息,便于维修人员进行检测维修。
1.1、整车控制器模拟信号诊断
油门踏板作为整车控制器采集驾驶员真实意图的关键部件,油门踏按的安全性直接关联到整车安全,实现对油门踏板信号的诊断是必不可少的。
1.2、整车控制器数字信号输入诊断
通常对于整车控制器数字信号输入引脚来说,都存在三种状态:高电平、低电平和悬空,即存在两种故障状态:短地故障、短电源故障。该整车控制器输入引脚为高电平信号,即开关闭合时整车控制器引脚处于高电平状态;而当开关未闭合时,该引脚为常接低电平状态;而当该输入引脚未接收低电平和高电平时,即处于悬空状态。对于整车控制器输入信号判断逻辑而言,只有两种信号:当高电平信号接入时,即开关闭合,该输入引脚处于高电平状态,逻辑为 1;当高电平信号未接入时,该输入引脚处于低电平状态,逻辑为 0。如果整车控制器无法接收到该两种信号的任意一种,即可判定该输入引脚处于悬空状态。输入引脚处于悬空状态即可说明该输入引脚处于断开状态,进而可以判断该引脚所在线束为断开或者该引脚未接入其他设备。相反,低电平信号的判断逻辑为当信号接入时,逻辑为 0;当信号未接入时,逻辑为 1,同样悬空状态下可以判断线束故障。
1.3、整车控制器数字信号输出诊断
整车控制器数字信号输出又区分为低电平输出、高电平输出,针对这两种输出形式都会有短地、断电源、开路三种诊断,每路输出增加一个回采电路用于故障诊断。
1.4、整车控制器CAN数据诊断
CAN网络是一种非破坏性仲裁的通信网络它因具有较高的通信速率(最高可达1 Mb/s)和灵活可靠的通信方式。控制系统之间的信息交互即可通过CAN网络通信的方式进行。但如其他系统一样,通信實体之间也需要进行通信故障的诊断,例如诊断通信异常、通信丢失等故障。
控制系统以一定的时间周期(如10 ms)进行一次相应的故障监测,检测是否出现了故障。每一个控制单元中都会设定一个错误监测计数器,计数器有计数上、下限,例如错误计数上限为127,下限为-128。一个驾驶循环开始的时候,错误检测计数从0开始,监测信号没有错误,则计数器减1,若一直累计到下限-128,则不再递减。而一旦监测到一个错误信号,计数器将归零或置于零上,若之后有连续的错误帧,则计数器持续累加,直到上限127,判断此故障为确认故障。在一个驾驶循环内,如果某一时段监测停止,则计数保持不变。在一个驾驶循环结束,下一个驾驶循环开始时,计数器归零,重新开始计数。其他位的记录原理与此类似。整车控制器以这样的诊断原理,将网络通信丢失的故障记录下来。
2、诊断系统管理
2.1、故障代码生成
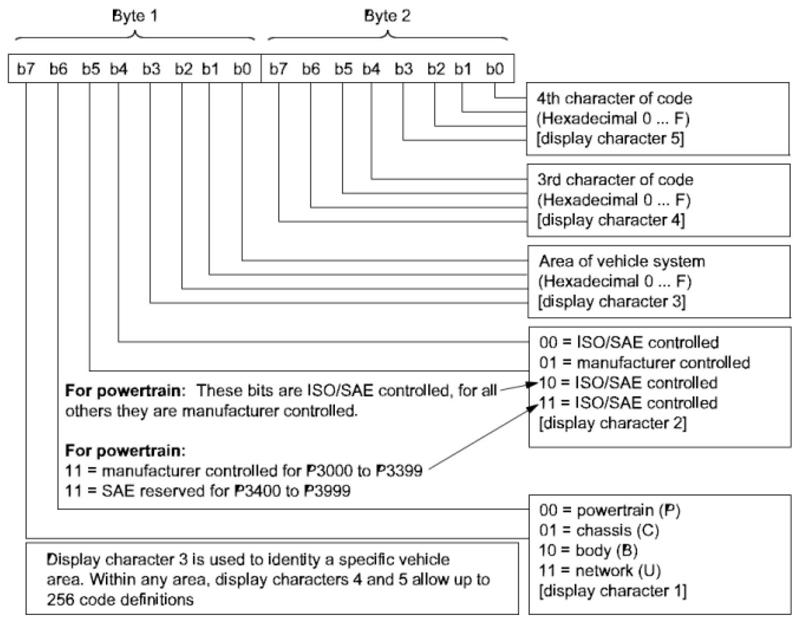
在ISO15031-6中对DTC的格式有明确的定义,该规范中定义了DTC共由三个字节组成,具体定义如下:
字节1:诊断故障代码高字节;
字节2:诊断故障代码低字节;
字节3:诊断故障代码失效类型字节。
通过DTC格式中定义的字节1和字节2可以很方便确定记录的DTC属于车上的哪种系统出现了故障,具体定义如下:
故障码按照电子电器诊断系统分为车身(Body)、底盘(Chassis)、动力(Powertrain)、网络(Network)4大类,按照系统、代码类别、十六进制值和缩写组成,如下:
(1)车身系统
代码类别:B0xxx-B3xxx;十六进制值:8xxx-Bxxx;缩写:B。
(2)底盘系统
代码类别:C0xxx-C3xxx;十六进制值:4xxx-7xxx;缩写:C。
(3)动力系统
代码类别:P0xxx-P3xxx;十六进制值:0xxx-3xxx;缩写:p。
(4)网络系统
代码类别:U0xxx-U3xxx;十六进制值:Cxxx-Fxxx;缩写:C。
字节3为故障代码失效类别字节,高4位代表失效类别,共计16类,如一般电气故障;低4位代表故障现象,共计16种,如电路对蓄电池短路。故障现象在逻辑上与失效类别相对应。
2.2、故障分类、操作、点灯
当故障发生时,必须及时准确地判定出故障类型。整车控制器通过收集其他控制器发送的故障信息以及通过自身检测到的故障信息,并结合车辆当前的运行状态,对不同故障做出不同的响应。本文将整车的故障分为 4 个等级,整车控制器将得到的故障信息按照故障严重程度对故障等级进行设置。
2.3、故障读取
汽车故障诊断除了可以让系统更加健壮,并实时处理出现的故障这个功能以外,还能将故障以DTC的形式记录下来,并通过诊断通信的形式传输给外部诊断设备进行分析。DTC被记录下来以后,外部诊断设备通过诊断通信的形式去读取这些故障信息。
3、结束语
由于电动汽车相比传统燃油车增加了很多电力电子设备,所以很多故障都和传统燃油车有差别。目前,电动汽车在制造过程中只追求基本行驶功能,而忽视了电动汽车的后续维护问题,所以规范处理电动汽车的故障问题对电动汽车的发展至关重要。整车控制器作为电动汽车的核心可以通过自检和集成的方式收集故障,从而编写故障代码,判断故障等级,并通过故障等级做出相应处理,以保证电动汽车的安全性。同时,可以通过特有的通讯方式来显示故障,并通过先进的故障诊断仪可以保证维修人员高效地维修电动汽车。
参考文献
1、吴建荣.纯电动汽车远程监控系统设计及故障诊断方法研究[D].吉林大学,2011
2、白彩盛.纯电动汽车的故障诊断思路分析[J].中国设备工程,2017.07(下)
