浅析轻量化自助式康复外骨骼机器人设计的可行性
2020-11-30王楚鑫
王楚鑫


关键词:轻量化;自助式;康复外骨骼机器人;可行性
根据中国残疾人联合会统计的数据显示,截止到2019 年中国残疾人总数将近九千万,其中肢体残疾的人数占四分之一。患病初期有效地康复训练对残障患者的日常生活活动能力和运动功能恢复具有良好的促进作用[1]。目前我国合格的康复医师占基本人群比例仅为每10 万人中1.7 个人,远远不能满足患者的康复需求,康复专业人才存在巨大的缺口[2]。随着科技的发展,运动康复疗法也在不断地创新,从最初普通的器械到智能化辅助器械逐渐进入医院,科技的力量正在改变传统的方法,为患者和医护人员提供最佳的仪器和治疗方法。
下肢康复机器人能够有效地帮助肢体运动障碍患者进行康复治疗[3],已经在机器人领域的得到广泛关注。目前,国内外已经有很多比较成熟的可穿戴外骨骼机器人产品,这为本研究所提出的轻量化自助式康复外骨骼机器人的设计可行性提供了支撑,但是大多都是减重反馈综合训练系统,体积大、价格较高,同时因为便携性差、价格高昂及操作复杂程度高的特性决定了下肢康复外骨骼机器人需要在医院进行操作治疗。因此,本文设计了一款适合于居家康复的轻量化自助式康复外骨骼机器人,并通过ADAMS 仿真对所建立的外骨骼机器人进行可行性分析。
1 轻量化自助式康复外骨骼机器人概述
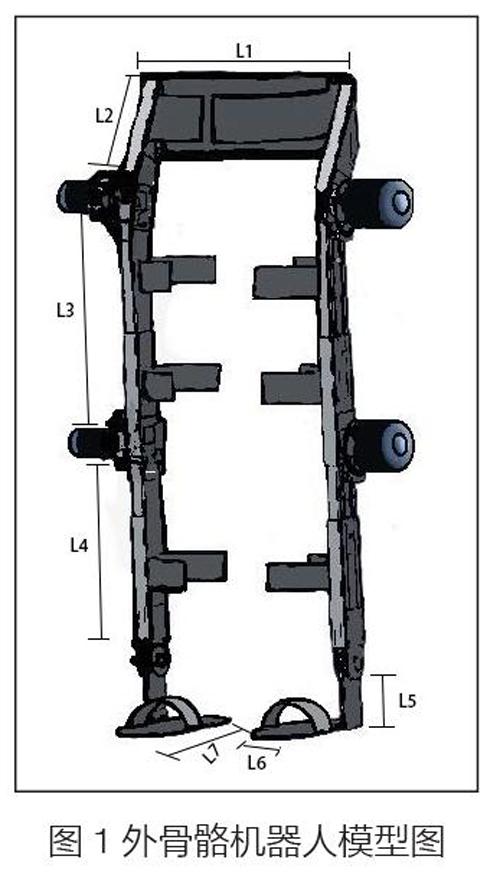
轻量化自助式康复外骨骼机器人是为帮助康复后期有一定运动能力的残障患者进行居家康复训练而设计的,因此外骨骼机器人需要满足轻便性和人机协调性。本文设计的外骨骼机器人主要包括腰部连接杆、大腿杆、小腿杆、足底支撑、驱动单元和紧固绑带,机械结构相对简单,其中大腿杆和小腿杆部件采用无级可调机制,能够满足95% 以上的人群使用。为了减轻外骨骼整体质量,对外骨骼机器人的结构进行简化,在单侧腿设置了3 个自由度,这是因为下肢运动主要发生在矢状面上,因此3 个自由度分别设置为髋关节的屈—伸主动自由度、膝关节屈—伸主动自由度、踝关节背曲—跖屈被动自由度。外骨骼机器人的驱动方式采用电机丝杠传动,将电机的旋转运动转变为直线运动,从而带动髋关节和膝关节实现屈伸运动,踝关节不施加驱动单元。在Solidworks 中完成对轻量化自助式康复外骨骼机器人的建模,模型图如图1 所示,尺寸表如表1 所示。
2轻量化自助式康复外骨骼机器人设计的可行性分析
根据轻量化自助式康复外骨骼机器人的尺寸、自由度设置和驱动方式,将Solidworks 建立的模型导入到ADAMS 中,通过建立关节约束,关节转动副和丝杠位移副,得到外骨骼机器人仿真模型,并进行关节力矩和关节角度跟踪仿真分析,以验证所设计的轻量化自助式康复外骨骼机器人的可行性。
2.1 建立轻量化自助式康复外骨骼机器人仿真模型
为了对轻量化自助式康复外骨骼机器人进行运动学和动力学分析,将轻量化自助式康复外骨骼机器人简化为一个五连杆模型,包括腰部杆、两个大腿杆和两个小腿杆。由于踝关节位置无驱动单元,所以将足底支撑部分与小腿杆固定到一起。基于此,结合轻量化自助式康复外骨骼机器人的基本尺寸,在ADAMS /View 模块中建立下肢轻量化自助式康复外骨骼机器人的简化模型。ADAMS / View 提供了大量的约束库、确定好各参考点的位置后,新建Link 件,各参考点被依次连接,下肢轻量化自助式康复外骨骼机器人的简化模型可以构建得到,如图2 所示。选取模型材料为铝合金,密度的大小设置为2.74E-006Kg / mm^3,泊松比0.330,杨氏模量的值为72.0GPa。零件库和动力学元件库,操作简单,交互界面友好。为了建立轻量化自助式康复外骨骼机器人的简化模型,在ADAMS / View 中选取并建立五个杆件的参考点。重心的默认位置位于形心,是由ADAMS 根据模型的形状推算得到,各个杆件的转动惯量根据模型的材料和结构尺寸计算得出,并且这些参数可以根据实际需求进行灵活调整。
建立下肢各构件的物理模型,对各个杆件的连接点及关节处施加约束,同时在髋关节和膝关节施加驱动。为了仿真的便利性,本研究假定所有的轻量化自助式康复外骨骼机器人的杆件都是刚体,杆件之间的连接采用刚性连接的方式,驱动器施加的驱动力矩和功率满足轻量化自助式康复外骨骼机器人运动的需要,各部分构件之间的摩擦予以忽略。为了尽可能地贴合真实的下肢轻量化自助式康复外骨骼机器人结构,需要将腰部位置的杆件进行固定,因此在腰部杆件和髋部位置的连接处设置一个Fixed 连接。根据本文所提出的踝关节为无动力关节,为了防止仿真过程中出现误差,在足底支撑和小腿杆件的连接处也添加一个Fixed 连接。为了实现髋关节和膝关节在矢状面内的屈—伸运动,在髋关节和踝关节处分别施加一个铰链连接,并在每个铰链连接上添加旋转驱动。最后,下肢轻量化自助式康复外骨骼机器人需要通过前进运动以获得各关节的性能参数,因此在腰部杆件与地面之间添加了一個平移驱动,通过步态实验测得人体平均步速,所以本文设定平移驱动的速度为1.2m / s。
2.2 关节力矩仿真验证
在ADAMS 软件中对所设计的轻量化自助式康复外骨骼机器人进行动力学仿真,获得轻量化自助式康复外骨骼机器人在运动过程中的关节力矩和关节角度的变化情况。
轻量化自助式康复外骨骼机器人的髋关节和膝关节关节力矩分布的仿真结果如图3 所示,单位为N · m。髋关节处和膝关节产生的最大的转矩分别为241N · m 和77N · m,均大于人体实际的髋、膝关节转矩,所以设定的髋、膝关节处的驱动装置满足助行器载人行走的动力需求。
2.3 关节角度跟踪仿真验证
为了验证所设计的轻量化自助式康复外骨骼机器人的运动特性与人体运动是否一致,需要从关节角度的变化趋势来观察。本研究采用三维动作捕捉系统对正常人体真实运动关节角度数据进行采集,用来作为对照组。仿真结果与人体真实步态的对比结果如图4 和图5 所示,其中红色虚线代表仿真结果,蓝色实线代表人体步态变化曲线。根据实验结果的结果看出,下肢轻量化自助式康复外骨骼机器人的髋关节和膝关节的关节角度变化与人体步态轨迹基本保持一致,从而可以判断本研究所设计的轻量化自助式康复外骨骼机器人模型和参数设定是符合人体工学的。通过仿真结果发现二者存在一定的误差,这是由于参考点的取点数有限和位置偏差造成的。因此,在接下来的工作中,还要对轻量化自助式康复外骨骼机器人做进一步地改进,比如通过制定补偿控制策略和增加仿真模型的参考点数量以更好地模拟正常步态。
3 结语
下肢康复外骨骼机器人是涉及人类健康的特殊领域,潜在经济市场十分庞大,多个国家已将其列为新型重点战略发展产业。本研究所提出的机器人结构简单,驱动方式有效,根据模型估计,整体质量大约为10kg,相较于市面上质量较轻的成都布法罗机器人AIDER [4],本外骨骼机器人在质量上有明显的优化。同时为了验证本研究所设计的轻量化自助式康复外骨骼机器人的协调性,通过ADAMS 进行了关节力矩和关节角度的仿真分析,仿真结果表明轻量化自助式康复外骨骼机器人的结构设计和动力设计切实可行。由于目前康复辅具的设计主要是以功能实现为主,对用户与产品之间的感情交流的考虑比较少[5],下一步将围绕情感化康复辅具设计策略开展研究。
