一种线性运动仿真调试工装的设计与应用
2020-11-30章弘威
章弘威
(徐州徐工施维英机械有限公司,江苏 徐州 221004)
0 背景
混凝土搅拌站控制程序升级后,需要进行仿真测试,但是诸如主机料门、拢料斗料门、提升斗动作的正确性,无法进行模拟仿真测试,都是通过手动给定信号,走完流程,具有一定的被迫性,无法完整的测试软件功能,影响软件的测试质量。
电器柜下线调试的时候,也是一直依靠手动给定信号,无法准确测试软件及电器柜的正确性,一直困扰着调试,影响调试速度及质量。因此设计一款通用线性运动调试工装迫在眉睫,势在必行。
1 线性运动的定义
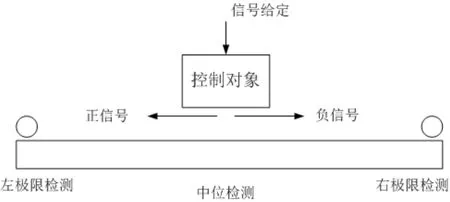
图 1 线性运动
如图 1 所示,线性运动的定义:在一定的行程内,分别设有左极限、右极限检测和中位检测。当控制对象收到正信号的时候,向左运动,检测到左极限的时候,自动停止,再收到负信号的时候,向右运动;在检测到有右极限的时候,自动停止,在信号给定的情况下,可以实现自动或者手动的往返运动。当然也可以停在任何一个位置。
可以看出,具有线性运动的特性的部件很普遍:比如:骨料缓存斗的料门动作、搅拌主机的料门、拢料斗的料门、提升斗的动作、泵车的中心泵的运动、支腿油缸的伸缩等。
2 线性运动仿真调试工装的方案设计
经过查阅资料,团队讨论,最终提出以下 4 个方案,分别是:
方案 1:气源+电磁阀+气缸+位置检测
缺点:需要单独提供气源,使用场合受限。
方案 2:液压泵+电磁阀+油缸+位置检测
缺点:占地面积大,使用场合受限。
方案 3:电动推杆+位置检测
缺点:位置检测工装需要定制加工,实现难度高。
方案 4:小型伺服系统+配套的位置检测
优点:占地小,可适用所有的线性运动的调试,实现难度较低。
通过充分的方案对比,最终确定方案 4。
3 一种线性运动仿真调试工装方案实施
3.1 组成及工作原理
该工装方案的构成见图 2 所示。由构成图中可以看出:通用线性运动仿真调试工装由 KH-01 可编程控制器、 DM542 驱动器、步进电机、接近开关、丝杆以及滑块等部件构成。
其工作原理图如下:系统发出控制指令通过控制器、驱动器控制滑块直线运动,也可以停在任意一个位置;通过位置检测开关,将位置信号反馈给控制系统;在全关的情况下,系统只允许左行;在全开的情况下,系统只允许右行。
3.2 接线原理(图 3)
3.3 参数设置
3.3.1 驱动器拨码开关设置
SW1 SW2SW3“ON” 额定输出电流为 1A。
SW4“OFF” 具有半流功能,500ms 无脉冲降流至额定输出电流的 0.7 倍。
SW5SW6SW7SW8 “ONOFFONON”电机每转步数为 800。
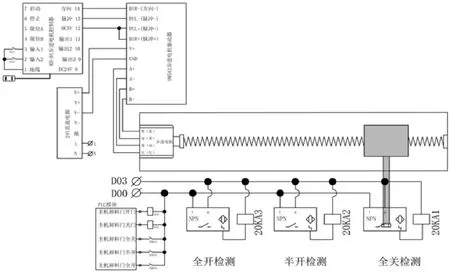
图 2 构成图
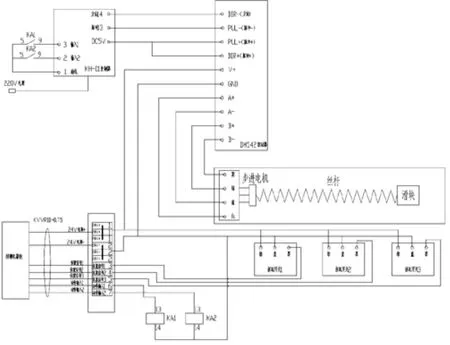
图 3 接线原理图
3.3.2 控制器程序
控制器程序见表 1。
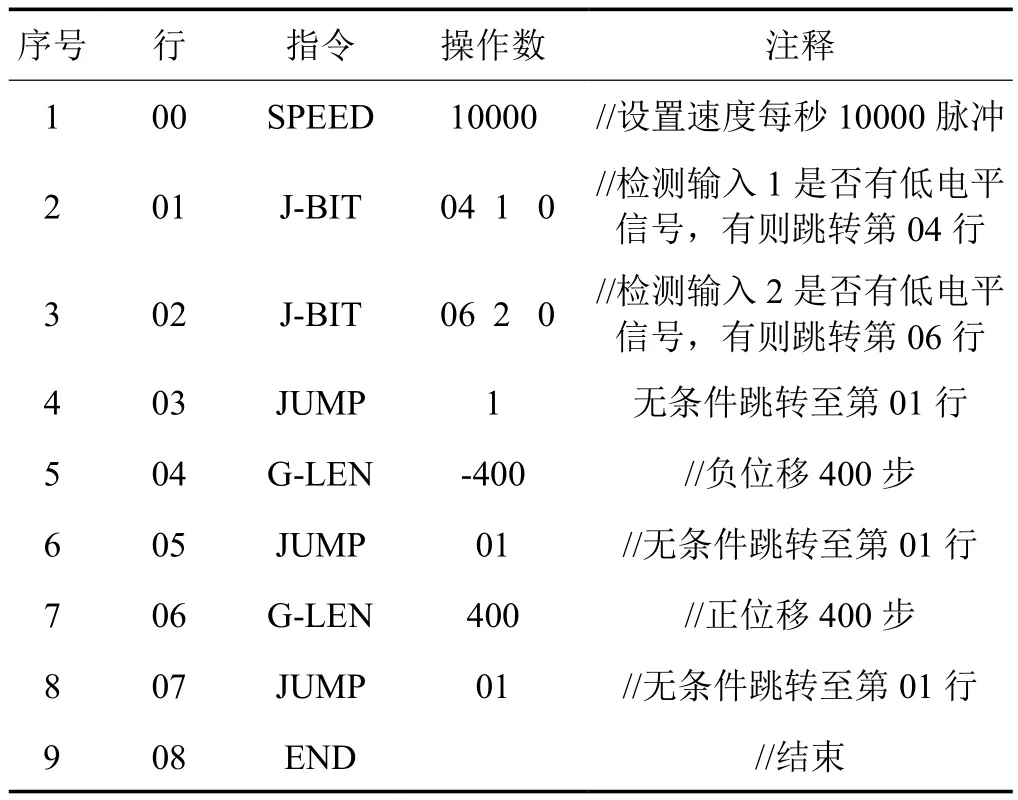
表 1 控制器程序
4 现场应用
图 4 为该工装程序在实验室用于测试主机料门、拢料斗料门、提升斗等程序的正确性,图 5 为在车间用于测试电器柜接线的正确性。

图 4 应用于实验室

图 5 应用于车间
5 小结
本文所介绍的线性运动仿真工装,具有结构简单、控制可靠、安装方便、易编程等优点,能够完全模拟搅拌主机料门、拢料斗料门、提升机等设备的动作过程,可取代原有的点动模拟,实现了自动控制。
通过该调试工装及时发现程序及电气柜不正确性共 10 次,并及时处理极大的提高了调试质量,预计减少质量损失 5 万元;平均每台搅拌站的调试时间可减少20 分钟, 极大的提高了调试速度。
该线性运动仿真工装,可以提高系统调试质量,同时使搅拌站控制系统的调试变得十分高效便捷,具有一定推广使用的价值。
