基于TRIZ 理论挤奶机器人行走机构的设计及分析
2020-11-30王子懿叶源涛王智慧
王子懿 罗 寅 叶源涛 王智慧
(安徽理工大学 机械工程学院,安徽 淮南232001)
手工挤奶的作业方式工作效率低且劳动强度[1]。依靠挤奶机械设备可满足日益增长的产量需求,并且能够提高奶源质量。TRIZ 理论是一种全面且系统化的能够为发明创造提供解决方案的新理论。TRIZ 可以开拓思路,挖掘创新潜能。通过TRIZ解决问题的案例有很多,邓学欣等利用TRIZ 对焊钳轻量化提供了思路,不仅让焊钳与工件发生干涉的机会变小,而且降低了生产成本,提高了点焊的质量效率[2]。贾丙琪等,应用TRIZ 对下肢外骨骼功能区结构以及尺寸做了优化设计,提高了下肢外骨骼使用的安全性与舒适性[3]。
1 问题分析
随着生活质量的提高,奶制品充斥着生活的各个方面,为了获得高质量优秀奶源,现代化养殖是大势所趋,传统人工作业效率低、且不能达到高品质奶源的质量要求,利用挤奶机器人代替人力,不仅能提高产奶效率,也能实现牧场自动化,养殖科学化。转台式挤奶机器系统占地空间大,移动不方便。管道式,移动式,活塞式挤奶机器系统操作对象单一,且需要人工干预。针对现有技术存在的不足,基于TRIZ 理论物理矛盾的分离原理,发明问题的标准解法,及物场模型分析设计出一种轨道式挤奶机器人行走机构,结构更加简单,减少了制造成本,缩小了工作空间,可以满足快速移动,精准定位作业目标。
2 TRIZ 理论分析
2.1 S 曲线预测分析
经图1 预测分析结果可以得知,最初挤奶方式为人工挤奶,从对奶牛习性的初步认识,到进一步的技术经验成长期,经历成熟的操作期,会被新型挤奶机构,挤奶机所代替,最终逐渐没落衰退。当一种技术系统经历S 曲线四个阶段后,即认识初期、技术成长期、操作成熟期、没落衰退期后必将会被新的系统所取代[4]。通过以上分析,得知轨道式挤奶机器人作业系统尚处于初期阶段,此阶段解决方案:利用机器人移动方便等优点,设计出轨道式行走机构,在轨道两端加装直线位移传感器,该系统合理布局,移动迅速,便于控制行走机构上端机械臂,准确定位作业目标。
2.2 因果分析法
发现出待解决问题背后的矛盾与逻辑,找出问题产生的根本原因,以此为突破点,采用因果分析法,梳理出非定量性鱼骨图。根据鱼骨图中功能模块,判别出问题参数,通过问题存在的有效性,确保机构设计合理性,功能完整性。图2 中反映出挤奶设备体积大、难操作、定位不精准等问题。

图1 挤奶方式发展的S 曲线
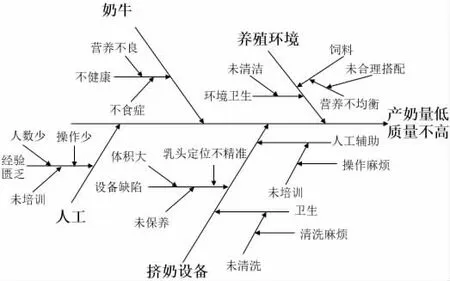
图2 鱼骨图分析
2.3 小人法
当整个系统内的部分组件不能很好的完成目标设定,就将其简化成小人模型,让具有能动性的小人到达预期目标[5]。根据现有挤奶设备,将其推演成小人模型,如图3 所示,用小人模型代替人工、挤奶设备、奶牛。并把小人进行重新组合来解决因果分析法中发现的问题,得到抽象的模型系统,如图4 所示。通过小人法的分析,打破了原有解决问题的思维定势。为了减少人力成本,同时要保持设备稳定性,就要使设备简单化,便于操作。为了快速定位目标,增加作业数量,可增设导轨和位移传感装置。导轨上可增设多条机械臂,同时作业多个对象。

图3 小人法问题模型

图4 小人法解决模型
3 物场分析及解决方案
3.1 建立问题模型
由因果分析得知,传统人工挤奶作业方式效率低,产奶质量不能标准化、统一化。且长期从事挤奶工作,会伤害到人的手部,腰部,甚至承受被奶牛攻击的危险。挤奶机的介入相比于单纯的人工作业,安全系数高,但只能满足小规模牧场的产量需求,且仍需要人工辅助。挤奶机设备自动化水平偏低,无法应用于大规模集中式养殖场,且移动速度较慢,无法精准快速定位牛棚所在位置,不能满足生产要求。问题模型如图5 所示。

图5 物场分析问题模型
3.2 解决方案
应用TRIZ 中创新原理与标准解,用电磁场与机械场代替了力场。解决方案如图x 所示,人工对挤奶机械臂及其末端执行器稍加干预,将原来的挤奶机由挤奶机械臂代替,同时加装轨道,把机械臂与轨道装配,轨道下方装有直线位移传感器,以来监测末端执行器是否到达正确工作位置[6]。解决了作业对象差异性,工作环境复杂性的问题,且实现快速定位,精准作业的目标,完成了小范围、多目标的设计要求。

图6 物场分析解决方案
4 模型建立及ANSYS 分析
4.1 模型建立
在电机托盘上设置单目视觉摄像头,可识别出牛棚编号,对其进行数据采集分析,得到奶牛作业情况,进一步判断是否执行挤奶工作。建模如图7 所示。

图7 行走机构模型
4.2 ANSYS 静力学分析
在正常工作过程中,行走机构底板承受所有载荷,在设计时需考虑其强度,故对其进行有限元分析[7]。选择材料结构钢作为设计材料,将其细化网格,节点数为129315,网格数为90368。工作载荷为3300N,施加在齿条挡板两侧。求解结果如图8 所示。最大变形量为0.0060169mm,满足安全工作要求。
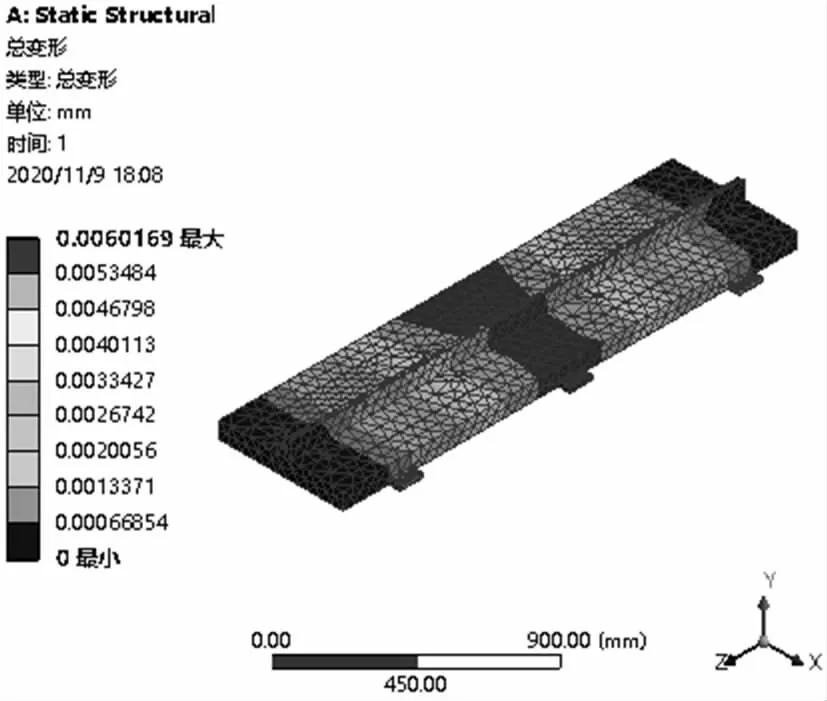
图8 总变形求解结果
5 结论
根据TRIZ 理论对现有挤奶机构存在的不足进行分析,通过鱼骨图发现矛盾根源,利用小人法找到解决方案,加以物场分析设计建模,并验证设计合理性,得到了挤奶机器人新型行走机构,实现了移动快,定位准,小空间,监测性等要求。为后续的研发提供了参考。
