高速铁路ATO线路站间时间分配优化方法
2020-11-30孟军,余刚,贾鹏,许硕
孟 军,余 刚,贾 鹏,许 硕
(中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081)
0 引言
自动驾驶技术的应用,可以有效地提高运输能力、降低运行能耗、减轻司机劳动强度,是高速铁路智能化的重要标志。高速铁路自动驾驶系统(ATO)是在CTCS-2/CTCS-3级列控系统的基础上,车载增加ATO单元、通用无线分组业务(GPRS)电台及相关配套设备,地面在临时限速服务器(TSRS)、调度集中控制系统(CTC)、列控中心(TCC)等设备上增加功能,车站股道增加精确定位应答器,从而实现车站自动发车、站间自动运行、车站自动停车、车门自动开门与防护、车门站台门联动控制等功能[1]。自动驾驶技术的应用,可以有效的提高运输能力、降低运行能耗、减轻司机劳动强度,有效降低运营成本,提高线网运营质量[2]。随着轨道交通运营里程的高速增长及高速铁路ATO系统的推广应用,对ATO车载设备的控制模式提出了更高的要求,要求ATO车载设备在运行准点率、控车舒适性、节能降耗等指标上达到优秀司机的操作水平。
目前ATO车载设备通过无线通信网络获取CTC发送的站间运行计划,严格依据站间运行计划的到达/通过时间点计算区间运行速度曲线,并按照速度曲线控制列车准点到达或通过车站。当中间一个或多个车站为通过计划时,若站间运行时间分配不合理,可能会导致ATO车载设备在自动驾驶过程中的多个区间运行过程出现“前松后紧”、“前紧后松”,或“时松时紧”的情况,影响停车站的准点率。通过研究提出高速铁路ATO线路站间时间分配优化方法,可以进一步优化站间运行时间的分配,实现CTC与ATO车载设备的协同运行控制。
1 高速铁路ATO准点运行时间分析
1.1 ATO准点运行功能
高速铁路ATO线路中,ATO车载设备通过无线通信网络接收CTC下发的运行计划,并按照运行计划控制列车准点高效运行。ATO准点运行功能由ATO车载设备和地面CTC和TSRS设备实现,ATO车载设备与地面TSRS设备通过GPRS网络建立连接,地面CTC通过TSRS向ATO发送运行计划信息,ATO车载设备通过TSRS向CTC发送列车运行状态信息。无线通信网络结构如图1所示。
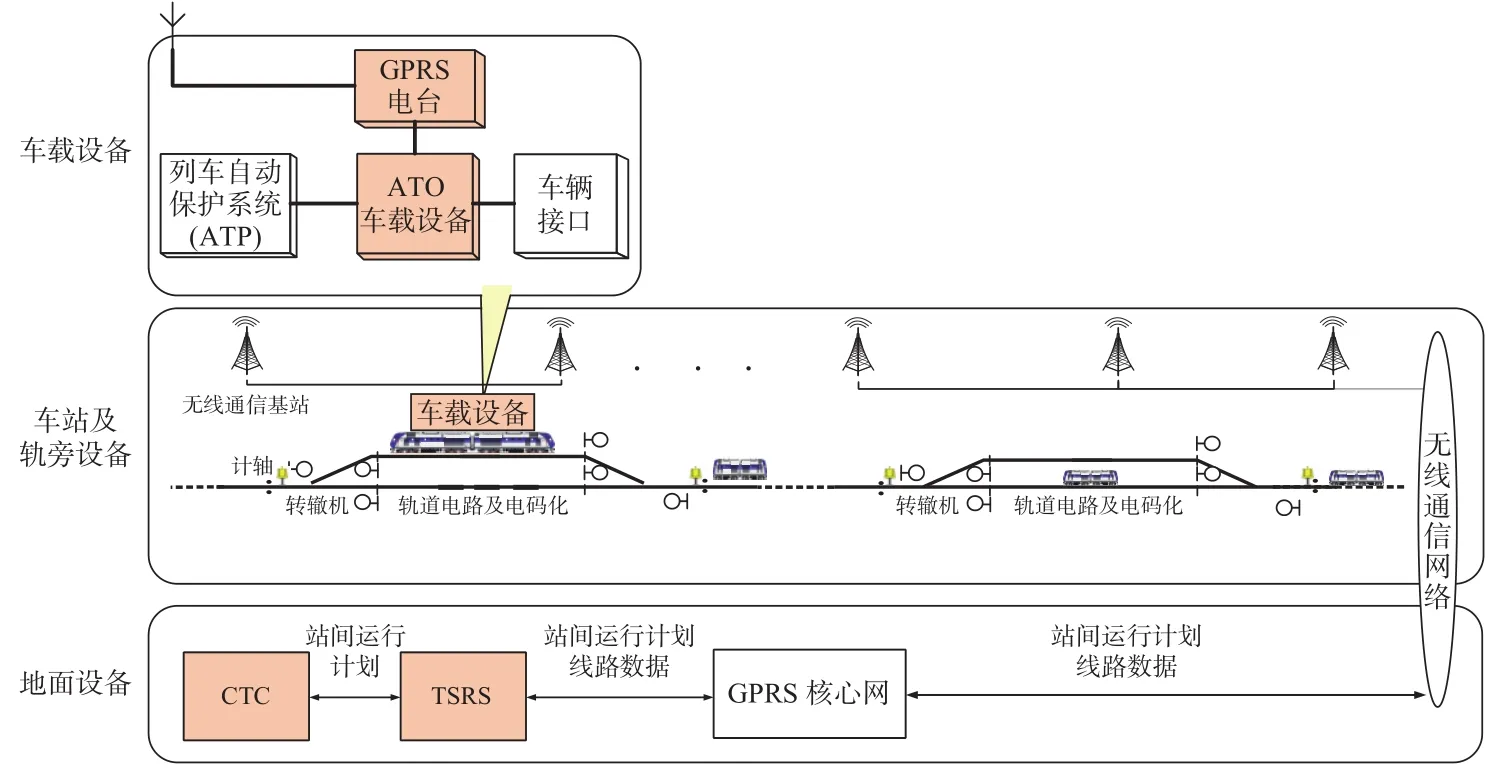
图1 无线通信网络结构Fig.1 Wireless communication network structure
CTC系统周期向ATO车载设备发送3站2区间的运行计划信息,包括:出发股道ID、出发时间、到达/通过股道ID、到达/通过时间、办客/不办客、通过/停车[3-4]。ATO车载设备收到运行计划后,按照“准点运行”的原则,根据运行计划(计划到达/通过时间、通过/停车)及站间线路数据(固定限速、坡度、临时限速、站间距),结合当前位置、速度、线路坡度、空气阻力、列车牵引性能、列车制动性能等因素,计算站间目标速度曲线,并控制列车按照目标速度曲线准点运行。与司机人工驾驶期间采用“定速巡航”的驾驶方式不同,ATO车载设备会根据区间准确的线路数据计算节能控制曲线,在保证准点的前提下,尽可能的使用惰行方式运行,行驶过程中充分利用线路坡度实现加速减速。当站间运行时间较宽裕的情况下,会有明显的节能效果。
由于列车在运行过程中受非常多因素的影响,这些因素在列车运行过程中随时可能发生变化,会导致当前预计的列车速度模型与实际列车运行的速度曲线存在偏差,该偏差随着时间及距离的累计将逐渐放大,造成最终到站早点或晚点。因此,需要在列车运行过程中通过当前运行状态实时校正预计的列车速度曲线,减少列车运行状态变化造成的偏差,确保获得最优速度控制曲线。
1.2 运行计划站间时间
目前,运行计划站间时间的分配通常需要通过牵引计算,折算进站、出站时间,计算区间运行时间及各中间站的通过时刻,并结合司机人工驾驶的方式进行优化。动车组司机在区间通常采用“定速巡航”的方式驾驶列车运行,并且对于中间车站通过时刻的准点性要求并不敏感,因而对于中间车站通过时刻分配的松紧对司机驾驶方式影响不大。与人工驾驶方式不同,ATO车载设备严格按照中间站通过时刻控制列车运行。当实际运营车次中出现1个或多个车站为“通过”时,中间车站所设置的“通过”时间点会直接影响ATO车载设备在本区间运行曲线、中间车站的通过速度、下一区间的起始速度和运行曲线。而当各区间时间分配不均时,ATO车载设备在不同区间运行会时快时慢,以及在停车车站发生准点、早点或晚点(以实际通过/到达时刻与运行计划时刻偏差<30 s为准点,偏差≥30 s为早点或晚点)到达的情况。
(1)前松后紧导致晚点到达。CTC设置A到C站的运行计划,A站8 : 07 : 00发车,B站8 : 21 : 00通过,C站8 : 30 : 00到达,而司机以ATO模式从A站8 : 06 : 26早点34 s发车,B站8 : 20 : 54准点通过,C站8 : 30 : 30晚点30 s到达。A站到C站运行计划执行情况如表1所示。
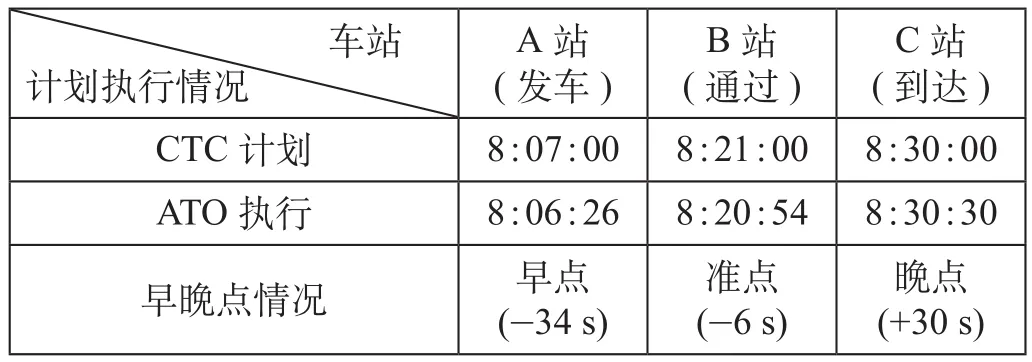
表1 A站到C站运行计划执行情况Tab.1 Execution of the operation plan from Station A to C
对区间运行情况进行分析:A- > B区间,ATO车载设备控制列车从A站出站后,根据B站计划通过时刻计算区间运行曲线,先加速至贴近顶棚速度308 km/h左右运行,之后开始惰行至170 km/h左右,准点通过B站。B- > C区间,ATO根据C站的计划通过时刻计算区间运行曲线,加速至贴近顶棚速度308 km/h左右后开始巡航,之后进入减速区开始制动减速,进站停车,晚点30 s到达C站。
在 A- > B- > C 这个区间 ATO 车载设备按照CTC发送的运行计划时刻准点执行,但是由于A- > B区间计划时间较长,B- > C区间时间较短,导致在A- > B区间ATO车载设备先以较高的速度运行后惰行至较低的速度准点通过B站;由于B- > C区间设置较紧,进入B- > C区间后ATO车载设备再次加速至顶棚速度区之后保持巡航,并减速进站。A- > B- > C区间的时间分配,使ATO车载设备在A- > B- > C区间运行呈现了“凹”字形,由于给A- > B区间分配较长,为了B站的准点通过的要求,ATO控制列车以较低的速度通过B站。由于B站通过速度较低,因而在B- > C区间需要额外消耗时间用于加速,使得最终晚点30 s到达C站。ATO车载设备在A- > B- > C区间的运行情况如图2所示。
综上所述,应综合考虑整个区间的运行情况,适当将B站的通过时刻向前调整,压缩A- > B区间的运行时间,以提高B站的通过速度,满足B- > C区间的时间要求。
(2)时间分配不均导致早点到达。CTC设置A到D站的运行计划,A站15 : 31 : 00发车,B站15 : 44 : 48通过,C站15 : 51 : 06通过,D站15 : 56 : 30到达。司机以ATO模式从A站15 : 30 : 30早点30 s发车,B站15 : 44 : 40准点通过,C站15 : 50 : 56准点通过,D站15 : 55 : 40早点50 s到达。A站到D站运行计划执行情况如表2所示。
对区间运行情况进行分析:A- > B区间,ATO车载设备从A站出站后,根据B站计划通过时刻计算区间运行曲线,先加速至贴近顶棚速度308 km/h左右运行,之后开始惰行至225 km/h左右,准点通过B站。B- > C区间,ATO车载设备根据C站的计划通过时刻计算区间运行曲线,加速至贴近顶棚速度308 km/h左右后保持巡航。C- > D区间处于减速区,ATO车载设备开始制动减速,进站停车,早点50 s到达D站。
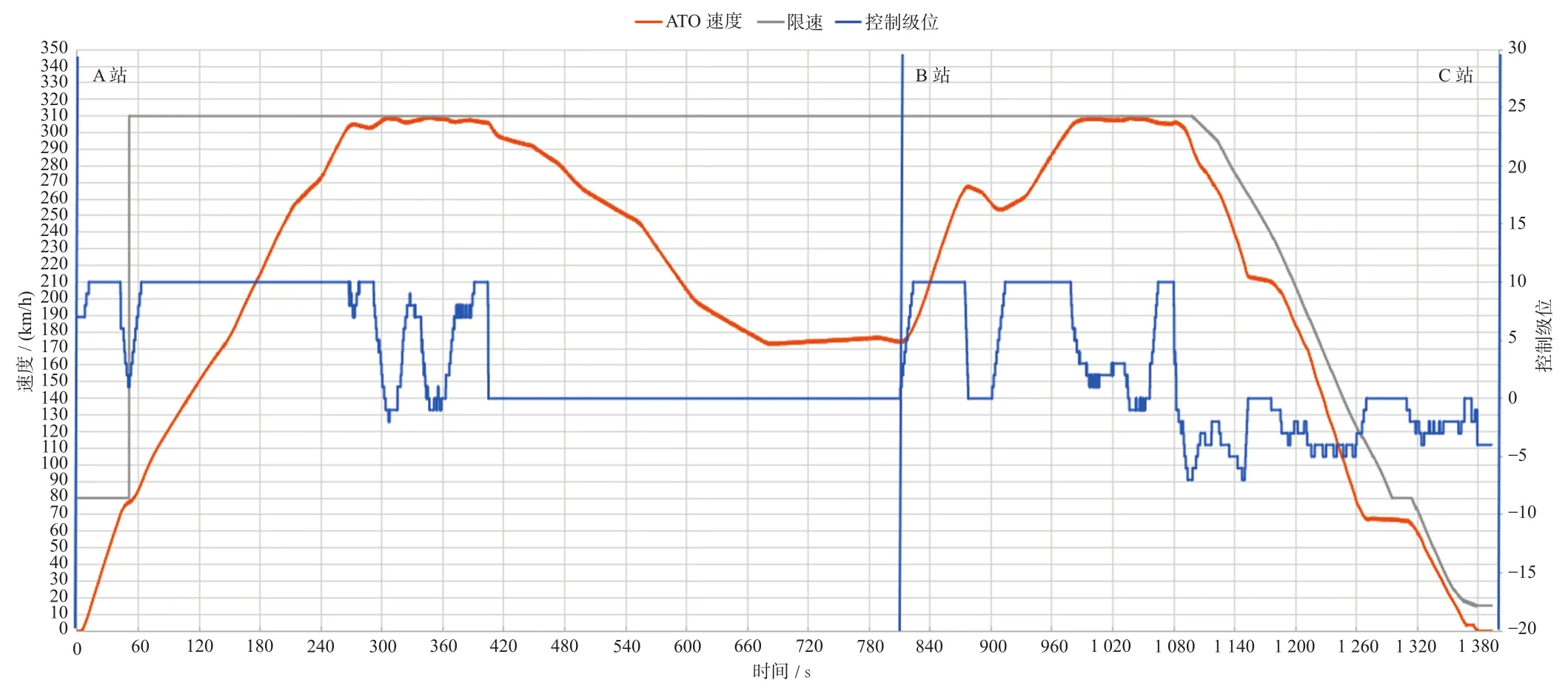
图2 ATO车载设备在A- > B- > C区间的运行情况Fig.2 ATO running scenario in A- > B- > C
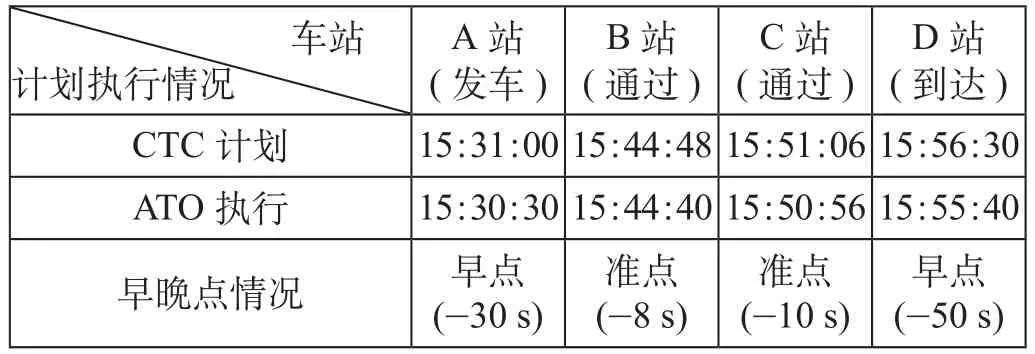
表2 A站到D站运行计划执行情况Tab.2 Execution of the operation plan from Station A to D
在A- > B- > C这个区间ATO车载设备按照CTC发送的运行计划时刻准点执行,但是在C- > D区间进入减速区后开始减速运行,最终早点到达D站。由于A- > B区间计划时间较长,B- > C区间计划时间较短,C- > D区间计划时间较长,导致ATO在A- > B区间先以较高的速度运行后惰行至较低的速度准点通过B站,进入B- > C区间后再次加速并在顶棚速度区巡航,进入C- > D区间之后计划时间较长,但是由于已经进入减速区,没有调节余量,最终早点50 s到达D站。这个区间计划时间分配,使得第一个区间较松,第2个区间时间较紧,最后1个区间处于减速区,没有调节空间。ATO 车载设备在 A- > B- > C- > D 区间的运行情况如图3所示。
综上所述,应综合考虑整个区间的运行情况,适当将B站的通过时刻向前调整,压缩A- > B区间的运行时间,加长B- > C区间的运行时间,以提高B站的通过速度,降低C站的通过速度,满足C- > D区间的准点运行的要求。
2 高速铁路ATO站间时间分配优化方法及验证
2.1 站间时间分配优化方法
由于各中间车站的通过速度将对后续车站的准点到达产生影响,因而站间时间优化方法需要将从“发车”到“停车”,包括中间各“通过”车站的整个运行区间作为整体进行考虑,满足准点到达停车车站的要求。建立列车动态模型,综合计算坡度、运行阻力、分相区等线路条件对列车运行的影响,考虑ATO控制算法,结合站间线路限速,按照到站时间对整个区间的运行速度曲线进行计算,从而获得中间各车站的通过时刻。
记A站发车,B,C,D站通过,E站停车,在进行区间的时间优化分配时,需要将A- > E作为完整区间进行优化计算,根据E站的计划到站时刻,结合车辆动态模型及线路数据,代入ATO车载设备控制算法,计算从A站出发E站到达的整个区间运行速度曲线,可获得中间通过B,C,D各站的时刻数据,从而实现中间各站时间的优化分配。如果对于某些中间车站的通过时间段有明确要求,如需要列车不早于或不晚于某个时刻通过中间站,可将该约束条件作为输入,带入优化方法进行计算。站间运行时间的优化方法如图 4所示。图4中绿框所示C站对“通过”时刻有明确的窗口要求,应将其作为约束条件进行计算,从而获得带约束条件的中间各站“通过”时刻的计算结果。
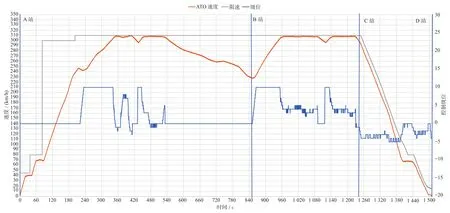
图3 ATO车载设备在A- > B- > C- > D区间的运行情况Fig.3 ATO running scenario in A->B->C->D
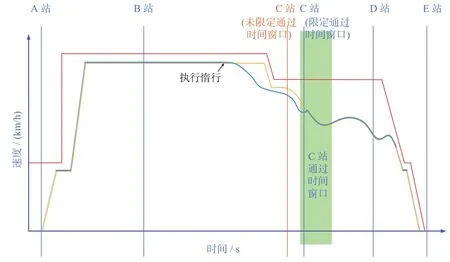
图4 站间运行时间优化方法Fig.4 Optimization method of time allocation between stations
为了对站间运行时间进行优化计算,建立由列车动态模型、线路数据库、ATO控制模型3部分组成的站间时间分配优化模型。
(1)建立列车动态模型。主要包括动车组车辆不同级位牵引、制动动态性能、列车运行过程中的阻力特性及列车能耗模型等,主要用于准确计算列车在区间运行的速度、里程。
(2)建立线路数据库。主要包括以下数据:①线路限速和临时限速;②线路坡度;③车站位置;④各站侧向通过速度;⑤运行路径;⑥分相区位置、长度;⑦其他影响自动驾驶控制的线路条件。
(3)建立ATO控制模型[5-6]。ATO控制模型包括速度曲线计算和ATO闭环控制算法2部分。速度曲线计算部分需要分别针对线路数据库的限速、坡度、站间距、侧线限速等条件,计算ATP保护速度曲线及ATO目标数速度曲线,计算结果取最小则为ATO控车速度曲线。ATO闭环控制算法采用比例微分积分(PID)控制算法,以列车的速度、位置作为反馈输入,计算牵引、制动命令,从而控制列车按照目标速度曲线运行。
列车运行图系统[7-10]需要结合列车实际发车时间,将整个区间运行计划时刻、时间约束条件及线路数据作为输入,代入ATO控制模型,得到ATO的牵引、控制命令,控制命令作用于列车动态模型计算得到列车的速度和位置信息,以此作为ATO控制模型的反馈输入,进行整个区间速度曲线的计算和运行时间的预估,经迭代计算后可获得中间各站优化后的“通过”计划时刻,其结果可作为CTC下发的各站间的运行计划时间。站间时间分配优化模型如图5所示。
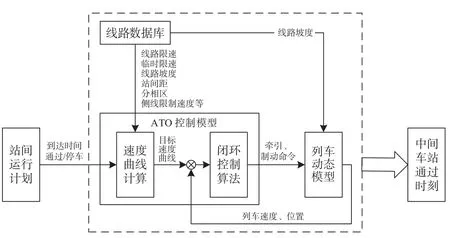
图5 站间时间分配优化模型Fig.5 Optimization model of time allocation between stations
2.2 站间时间分配优化方法验证
使用站间时间分配优化方法,可以对运行计划中各站间运行时间进行更加合理的分配。以A到C站的情况为例进行优化计算。为了与原执行情况进行对比,优化计算时采用相同的发车时间,以A站实际的发车时间和C站计划到站时间为基准,对B站的通过时间进行优化计算,得出B站计划通过时间为8 : 18 : 06,比原计划提前1 min 54 s。CTC按照优化计算结果下发A到C站的运行计划,ATO车载设备根据优化后的运行时间控制列车在8 : 06 : 26发车,8 : 17 : 58准点通过B站,并在8 : 29 : 50准点到达C站。与原计划相比,C站的到站准点性由晚点30 s到达提高到准点到达(偏差<30 s)。时间分配优化对比如表3所示。
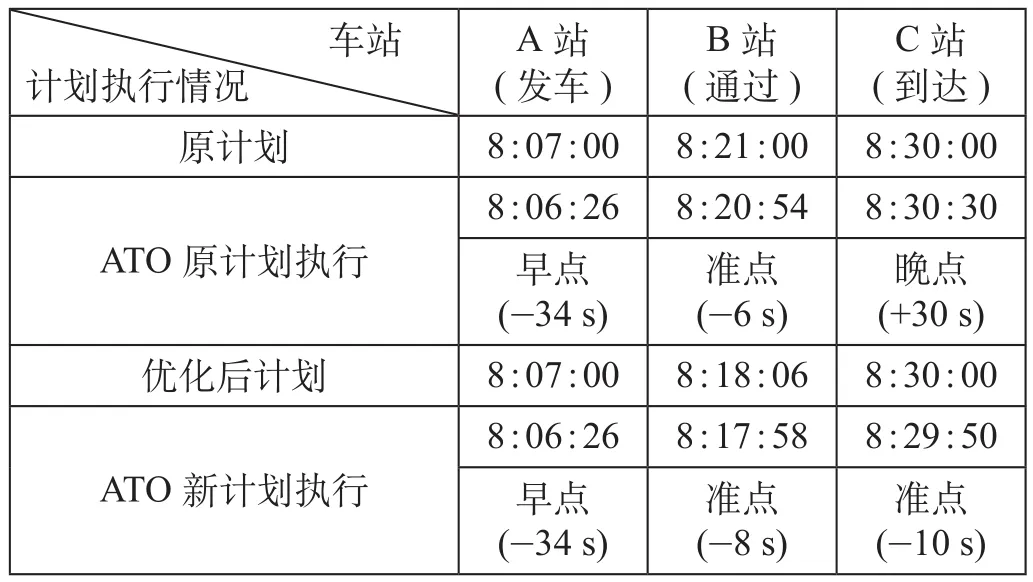
表3 时间分配优化对比Tab.3 Time allocation optimization comparison
与优化前区间自动驾驶运行情况相比,优化后的计划时刻使ATO车载设备控制列车通过B站时速度由170 km/h提高到265 km/h,C站的到达时间由晚点30 s变为了准点到达。同时,在A- > B- > C整个区间ATO车载设备按照节能算法控制运行更加平稳,以准点运行为基本要求,先贴近顶棚区以308km/h的速度巡航运行,之后采用惰行+小级位制动的节能控制方式,准点通过B站,在B- > C区间保持惰行+小级位制动的方式控车,未再使用牵引命令加速,最后减速进站,准点到达C站。在整个区间运行过程中,没有出现优化前的“凹”字形速度曲线,ATO车载设备控制更加平稳、节能。优化后的ATO 车载设备在 A- > B- > C区间的运行情况如图6所示。
3 结束语
CTC系统下发的运行计划是ATO车载设备控制列车高效、准点、平稳运行的基础,在运行计划生成时使用站间时间分配优化方法,可获得中间各站优化后的通过时刻,与原计划时刻的运行情况相比,经过优化计算后的时刻表可以在保证ATO车载设备准点运行的前提下,更多地使用惰行工况,避免多次牵引加速的情况,列车在区间运行更加平稳、节能。目前,站间时间分配优化方法在实验室进行了测试与验证,后续将结合运行图的编制系统进行深入研究,以满足实际线路的应用需求,进一步提高高速铁路ATO线路自动驾驶列车运行的效率。
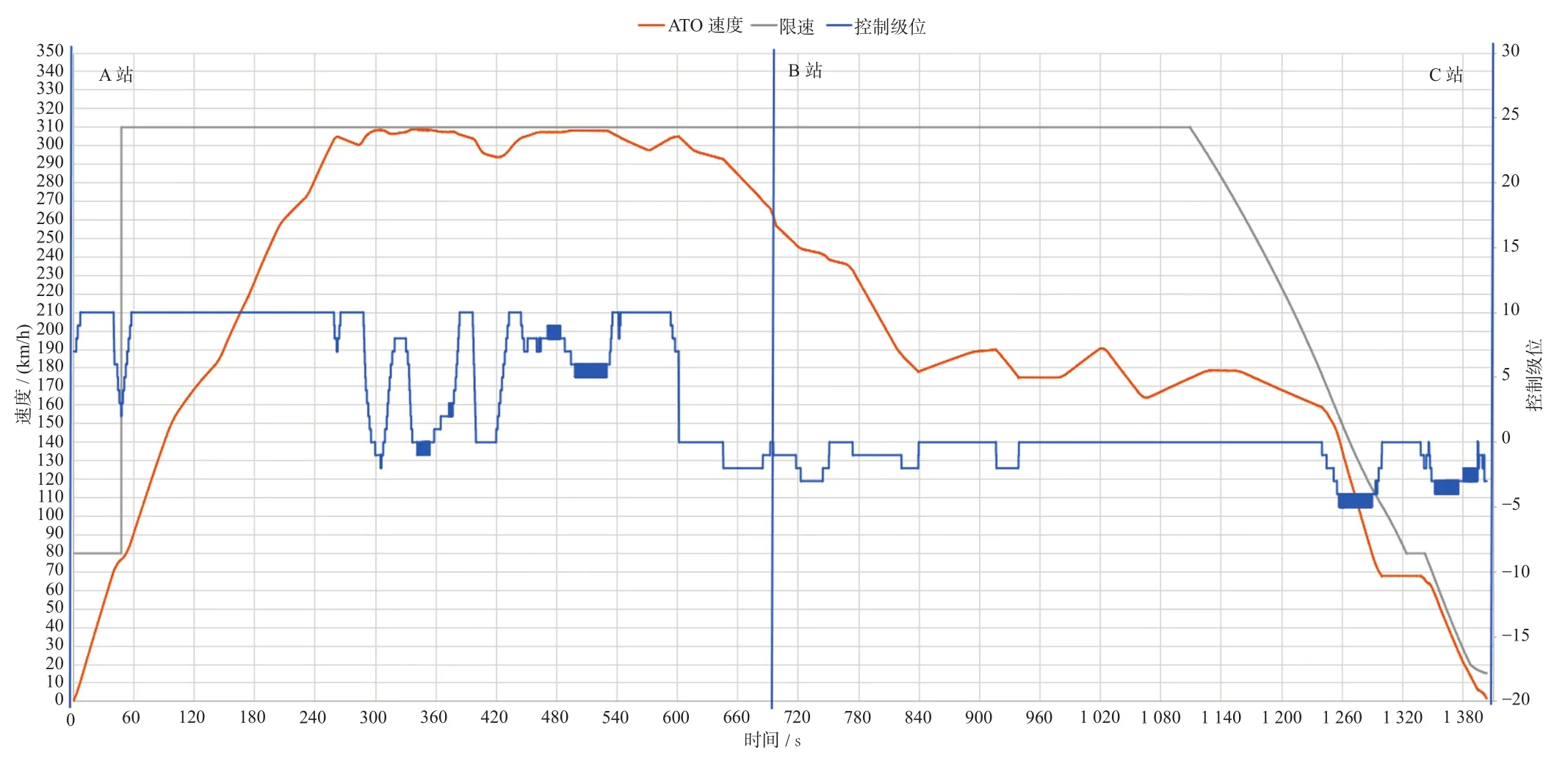
图6 优化后的ATO车载设备在A- > B- > C区间的运行情况Fig.6 ATO running scenario in A- > B- > C after optimization
