高分七号卫星高精度控制技术与验证
2020-11-30陈超丁建钊王淑一刘洁
陈超,丁建钊,王淑一,2,刘洁,2
1. 北京控制工程研究所,北京 100094 2. 空间智能控制技术重点实验室,北京 100094
高分七号卫星(GF-7)是中国首颗1∶10000比例尺立体测绘卫星,并要求在具有无控制点的情况下实现大比例尺测绘。卫星采用降交点地方时为上午10:30的太阳同步回归轨道,轨道高度495 km,设计寿命8年。GF-7要求控制系统具有0.001°的姿态确定精度,三轴姿态稳定度要求实现10-4(°)/s;具有32°范围内快速侧摆机动能力;驱动翼板跟踪太阳,驱动对地数传天线跟踪地面站。与以往同类卫星相比[1-4],GF-7卫星对控制分系统姿态测量精度、姿态控制精度和稳定度、卫星机动能力、寿命、可靠性和地面验证方面都提出了更高的要求。
通过调研高精度测绘卫星控制系统设计[1,4-6]发现,根据不同的测绘体制[5],卫星控制系统的配置也相去甚远。具有异轨测绘体制的遥感卫星,包括早期的Quick_Bird,以及近年发射的WorldView-4,都配置CMG群,通过快速机动,实现异轨测绘或通过快速机动、凝视成像等技术满足立体测绘需求。在中国以外,同轨测绘以日本的ALOS-1卫星为代表,配置了动量轮实现同轨立体测绘。
纵观国外的测绘卫星,控制系统都配置了高精度的星敏感器进行姿态测量,满足高精度的姿态测量要求[7],其中美国测绘卫星指标最高,均采用了亚角秒级星敏感器。中国测绘卫星发展较晚,早期的民用测绘卫星以资源三号卫星(ZY-3)01、02星为代表,控制系统稳定度达到5×10-4(°)/s,惯性姿态测量精度实现了0.005°指标要求[8]。GF-7发射后经在轨评估,其控制指标达到了国内领先、国际先进的水平。指标比较如表1所示。
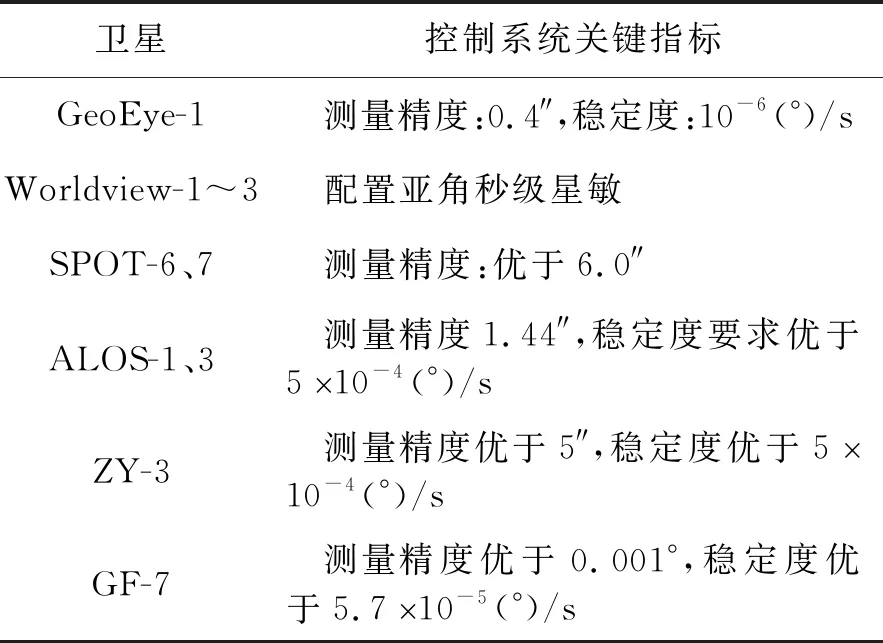
表1 主要测绘卫星控制指标比较
为了满足任务要求,GF-7控制分系统配置具有星图融合功能的甚高精度星敏感器和高平稳翼板驱动机构,采用优化的高精度校时、短延迟的3U控制器体系构架,并设计了星地大闭环姿态补偿算法,采用敏感器在轨参数标定技术,实现了卫星在轨高精度高稳定度运行。控制分系统基于系统配套全面、功能经典的设计特点,首次实现了在基于3U平台体系下的控制算法规范化、编程模块化、程序通用化的代码固件库,功能模块代码可以直接应用于其他卫星。采用硬件冗余和系统重构方案实现控制分系统8年长寿命设计,并对关键单机开展寿命验证。
1 控制系统设计
1.1 任务分析
早期的测绘卫星由于星敏感器存在几十角秒的低频噪声,并且当翼板驱动机构驱动挠性翼板时会引起姿态较大的波动,这些现状都成为GF-7实现高精度指标的瓶颈。
图1为ZY-3卫星在轨飞行期间星敏感器光轴夹角变化曲线。从图中不难发现,在轨道运行周期,星敏感器的夹角成周期性波动。最大波动范围约20″。

图1 ZY-3卫星星敏感器在轨夹角误差输出曲线Fig.1 Error curve of included angles between optical axises of star sensor in ZY-3 satellite
图2为ZY-3卫星在轨运行期间姿态角速度波动曲线。经分析,该波动主要由于具有挠性的翼板经步进式驱动电机驱动引起星体姿态抖动。
基于控制系统的任务需求分析,GF-7控制系统设计的重点在于克服姿态测量回路的低频噪声和抑制翼板转动引入的姿态抖动。在驱动翼板和对地数传天线运动过程中实现高精度指向和高稳定控制。飞行期间具有偏流角修正,同时在姿态机动后需要快速稳定。

图2 ZY-3卫星在轨期间三轴姿态角速度曲线Fig.2 Estimated rate curves of attitude angles for three axis on orbit of ZY-3 satellite
1.2 控制系统配置
在GF-7高精度姿态测量需求的牵引下,控制系统配置新研制的甚高精度星敏感器与三浮陀螺组合进行姿态测量。同时针对可靠性设计需求,测量系统中设计了红外地敏与陀螺构成中等精度姿态确定系统,实现姿态确定系统的异构备份。
在控制回路设计中,配置了动量轮和控制力矩陀螺(CMG),兼顾高稳定控制和姿态快速机动。配置推力器完成初始姿态捕获和轨道维持。
为了成像期间克服由于驱动翼板激起的挠性,配置了新研制的高平稳翼板驱动机构。
为了满足8年设计寿命的需求,不但对敏感器和执行机构通过冗余备份,控制器也都配置了主备份。控制系统采用具有短延迟、通用化的3U控制器[3],“3U”是控制计算机(CCU,含A、B机互为备份,以及异构的应急线路)、信息采集单元(ICU,含A、B机互为备份)和驱动控制单元(ACU,含A、B机互为备份)的统称,分别负责控制律计算、敏感器信号采集和执行机构驱动。控制系统配置图如图3所示。
1.3 控制系统主要工作模式
为了满足高精度控制任务要求,GF-7控制系统设计了多种工作模式,包括运行段飞行模式、姿态机动模式等。尤其相比于以往测绘卫星新增的陀螺标定模式,专门用于标定陀螺的安装矩阵,以提高姿态确定精度。

图3 GF-7姿态轨道控制系统构成逻辑示意Fig.3 Sketch of GF-7 AOCS architecture configuration
2 技术特点
2.1 高精度姿态确定技术
在GF-7控制系统设计中,为了实现0.001°姿态确定精度,一方面根据指标分解,在单机层面,通过采用星图融合算法及结构稳定设计技术,研制了短周期误差(LFE)更小的甚高精度星敏感器;另一方面,在系统设计中,采用多种抑制低频误差的方法进一步提高姿态确定精度。
由GF-7指标需求,国内首次提出亚角秒级短周期误差的精度要求,开展星敏感器单机技术攻关。为了提高姿态测量精度,对星敏感器的重量和功耗分别进行约束,满足与卫星相机载荷一体化安装的需求,从而减少星敏相对基准变化量。在系统层面,GF-7采用姿态参数补偿的方法,减少姿态的低频误差。该方法根据星敏感器误差分类[12],建立傅里叶多项级数误差模型[13]。
设计中针对星敏不同频次的误差项分别进行识别和补偿。GF-7针对星敏感器低频误差项,通过对带控制点的卫星相机图像数据进行事后处理,采用扩展卡尔曼滤波多项式拟和参数估计的方法辨识卫星姿态测量中的低频误差[14],并补偿到星体姿态测量系统中。补偿公式如下:

(1)
式中:φ、θ、ψ分别为滚动、俯仰和偏航方向的短周期误差角;ω为卫星运行角速度;t为时间;N为星敏低频误差建模的傅立叶级数的总阶数;aki、bki(i=x,y,z)为低频误差待确定的傅立叶级数的系数。图4为补偿前后的姿态估计误差仿真曲线。

图4 引入低频补偿后姿态估计误差曲线Fig.4 Estimated error curves of attitude angles based on low frequency compensation
此外,为了减小星敏感器安装基准偏差,GF-7专门设计了陀螺在轨参数标定模式,通过采用在轨陀螺参数辨识的方法,估计陀螺安装误差、刻度因子误差[9]。陀螺误差公式如下所示:

(2)

令

(3)


(4)

(5)

图5 引入陀螺标定计算的陀螺安装误差曲线Fig.5 Alignment error curves based on gyro calibration
2.2 高平稳度控制技术
为了克服翼板的挠性震动,GF-7控制系统采用分布式控制技术,通过单机和系统两个层面,开展挠性抑制设计,提高系统稳定度。分布控制原理框图如图6所示。
首先在单机层面,提出高平稳翼板驱动机构要实现5%相对稳定度的指标需求。单机通过安装在输出轴的反馈元件将翼板的挠性模态检测并反馈至驱动机构的控制器,通过设计相位补偿器实现了翼板扰动的主动控制和抑制。补偿器传递函数H1(s)如下:

(6)
式中:α为分度系数;T1为设计的时间常数。

图6 分布式控制示意Fig.6 Diagram of distributed control
在系统层面,设计了结构滤波器,进一步减少翼板挠性的影响。结构滤波器采用的结构形式如式(7)所示[15]。
依据翼板第一阶频率设计卫星三轴结构滤波器参数,三轴结构滤波器传递函数F(s)为:

(7)
式中:ωz、ωp分别为零、极点频率;ζz、ζp为阻尼比。结构滤波器的波特图如图7所示。

图7 结构滤波器波特图Fig.7 Band diagram of structure filter
2.3 高精度控制系统体系构架
在GF-7的高性能指标下为控制系统研制了新单机和新控制器构架,该构架包括高精度星敏感器、高平稳翼板驱动机构以及具有高时间同步机制的计算机体系结构,形成了可用于其他遥感卫星控制系统设计的基本型。
2.3.1 高时间同步体系
GF-7控制系统设计了具有高时间同步精度的控制器构架。时间同步信号连接示意图如图8所示。控制系统通过CCU接收整星提供的高稳时钟秒脉冲信号,分发给姿态测量敏感器和执行机构,同时校准控制系统内部的时间基准。

图8 GF-7控制系统时间同步信号 连接逻辑示意Fig.8 Logic diagram of time synchronization signal of GF-7 control system
为了进一步提高时间同步精度,除了采用常规时钟基准单元校时[16]外,相对早期测绘卫星还新增了均匀校时算法。
均匀校时公式如下:
Δt调=Δt调×k+(1-k)×Δnew
(8)
式中:Δt调为控制系统每个控制周期增加的时间,其中:
Δnew=(Tnew-Told)/1000000-1
(9)
式中:Tnew、Told分别为当前次和上次时间基准单元秒脉冲锁存的星时计数器值;k为滤波系数。
在下次高稳时钟单元的秒脉冲信号到来之前,系统引入1 s内星时均匀调整校时计算,即在剩余的控制周期内按照Δt调/n进行均匀校时,其中n为控制周期。
2.3.2 短延迟时序设计
在软件时序设计中,为了保持系统延迟最优设计,采用姿态测量与控制律计算分开运行的时序策略,将控制量快速输出,较优化前延迟时间缩短几十毫秒,进一步提高控制系统稳定度。
2.4 高精度姿态测量敏感器
在系统配置中,甚高精度星敏感器采用遮光罩、光学系统和探测器三级温控的方式,实现了0.3″/℃结构热变形指标。此外在中国首次研制基于星点融合的算法,姿态测量精度达到亚角秒级。
为了提高姿态测量精度,采用具有2 048×2 048像元的CMV4000探测器。为了实现星图快速处理,该产品为中国首次采用多核处理(CPU芯片型号:SOC2012)完成3个探头星点识别、星图融合、姿态计算等。实物照片如图9所示。SOC2012关键指标如表2所示。甚高精度星敏感器关键性能参数要求如表3所示。

图9 甚高精度星敏感器实物Fig.9 Picture of very high precision star sensor

表2 SOC2012处理器关键参数

表3 甚高精度星敏感器关键性能参数
2.5 高平稳翼板驱动机构
高平稳翼板驱动机构首次采用永磁同步电机直接驱动太阳翼板的驱动形式,该产品通过上位机控制与本机高带宽控制器形成分布式控制系统。在本体控制系统中,通过安装在输出轴的反馈元件对翼板的挠性模态进行检测并反馈至驱动机构的控制器,实现了翼板扰动的主动控制和抑制。实物照片如图10所示。单机实现的主要性能如表4所示。在地面开展性能验证,稳定度测试数据如表5所示。
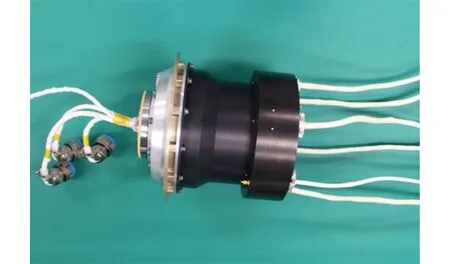
图10 高平稳翼板驱动机构实物图Fig.10 Picture of high-stability SADA

表4 高平稳翼板驱动机构关键性能参数

表5 高平稳翼板驱动机构的稳定度测试数据
3 在轨飞行验证
GF-7于2019年11月3日发射,控制系统按照飞行程序开展相应工作模式的验证。经过对在轨遥测数据分析,控制系统实现了各项要求的指标。其中,姿态稳定度达到10-5(°)/s量级,如图11所示。惯性姿态测量精度优于0.001°。星敏感器测量精度统计结果如表6所示。光轴夹角曲线如图12所示。图13描述了翼板驱动机构由开环控制模式转为闭环控制模式时稳定度明显提高的过程。图14为整星姿态角速度在翼板驱动机构由开环控制改为闭环控制时稳定度明显提高的过程。

图11 GF-7星敏感器在轨夹角误差输出曲线Fig.11 Error curve of included angles between star sensor′s optical axis of GF-7

表6 甚高精度星敏感器在轨性能统计结果

图12 引入转速闭环后的翼板驱动角速度曲线Fig.12 Angular rate curves of high stability SADA with closed-loop control

图13 引入转速闭环后的姿态角速度曲线Fig.13 Attitude angular rate curves after SADA′s closed-loop control
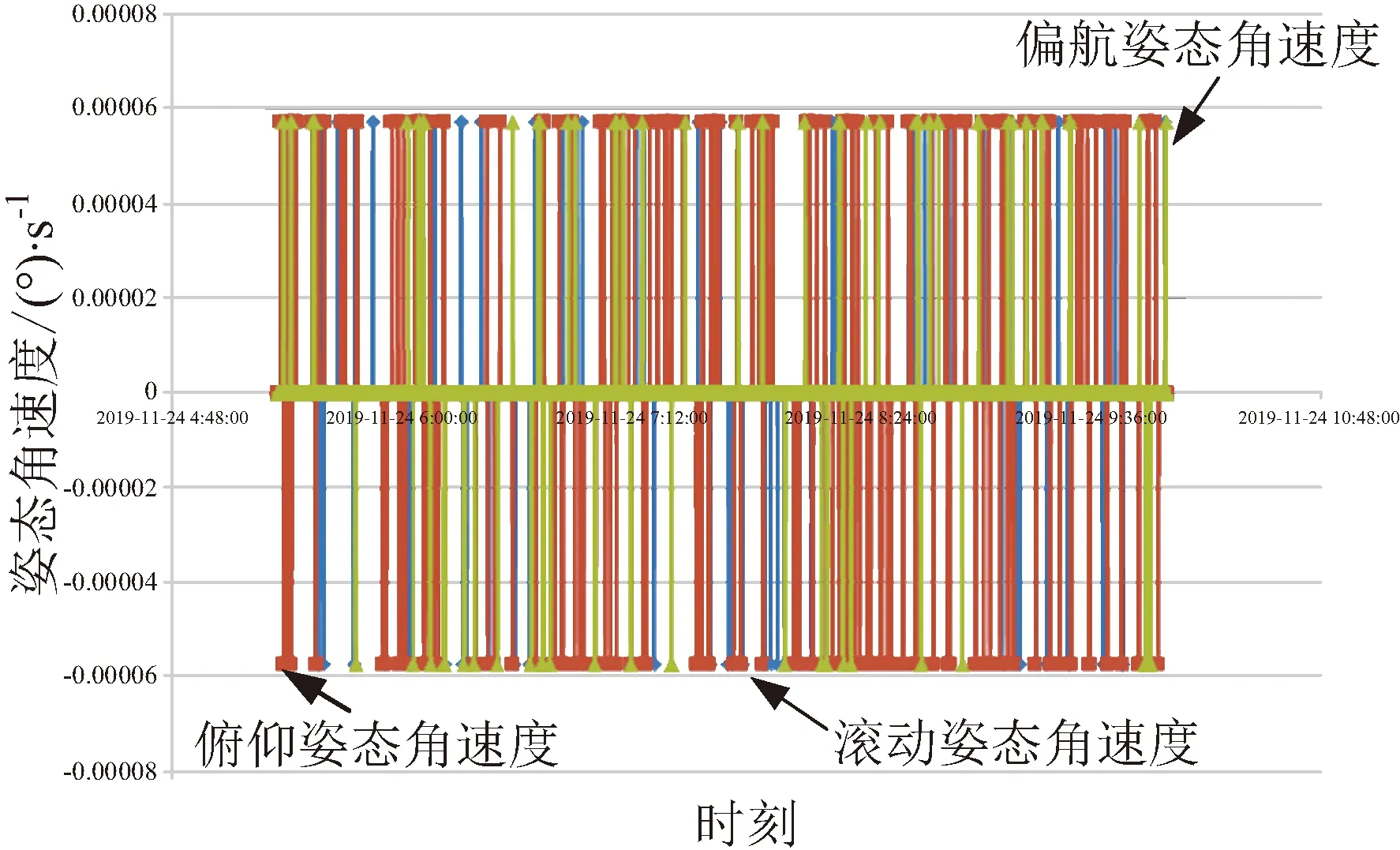
图14 引入转速闭环后的局部放大的 姿态角速度控制曲线Fig.14 Control curve of local enlarged attitude rate based on SADA closed loop control
4 结束语
经过在轨飞行验证,GF-7卫星控制系统实现了卫星提出的高精度指标要求,研制的甚高精度星敏感器、高平稳度翼板驱动机构性能满足设计指标,所形成的软件代码固件已经成功应用于其他卫星。在轨测试结果表明,控制系统采用的分布式控制技术有效地提高了稳定度指标,采用的甚高精度星敏感器有效改善了姿态测量中的短周期项波动。从在轨测试数据不难发现星敏感器依然存在呈轨道周期性的低频噪声项,后续将根据地面影像采用事后处理技术进一步提高定姿精度。
