某型车载加榴炮行军固定器空间尺寸测量方法探究
2020-11-28李庆宇高伟
李庆宇 高伟
【摘要】车载加榴炮又称卡车炮,最先源自法国。它将加榴炮装到军用越野卡车上,通过一体化设计,使得炮、车巧妙地合二为一。[1]本文以某型车载加榴炮行军固定器生产过程中空间尺寸难于测量为背景,通过关节臂测量机的引入,数据处理技术的运用,为空间尺寸的测量提供了三種途径。对关节臂测量机、测量过程、数据处理过程进行介绍,并对三种方法进行对比。本文对今后的测量及验收工作具有一定的创新指导意义。
【关键词】车载加榴炮;行军固定器;关节臂测量机;空间尺寸测量
1引言
车载加榴炮是一种将传统牵引火炮、牵引车、自动供输弹系统、信息系统等有机集成为一体的新型炮兵压制武器系统。具有机动性强、反应快、射程远、威力大、成本低、自动化水平较高、系统扩展能力强等诸多优点。[2]行军固定器是保证车载加榴炮机动性的重要环节,其主要作用是行军过程中锁紧炮身,保持火力系统回转部分的稳定性,避免火炮行驶过程中由于颠簸造成回转、起落部分对座圈、方向机、高低机等部件的冲击损伤。
2问题分析
2.1行军固定器组成及作用
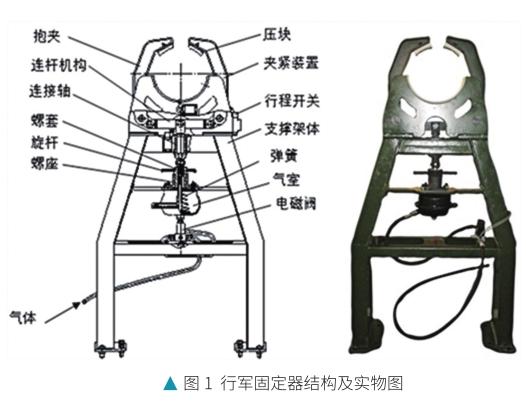
如图1所示,行军固定器主要由支撑架体、夹紧装置、气室、电磁阀、行程开关等组成。工作时,通过压缩气体驱动气室活塞杆控制抱夹的锁紧和解脱,从而起到支撑、锁紧炮身的作用。
2.2空间尺寸测量方法分析
为满足要求,抱夹几何中心到底平面距离需要控制到1235㎜(无公差要求)。如图2所示,抱夹几何中心并未存在于实体之上,传统的测量方式难于测量。为解决该问题,我们将结合关节臂测量机、数据处理等硬件、软件技术,为高效、精确测量该空间尺寸提供途径。
2.2.1关节臂测量机简介
如图3所示,HEXAGON ROMER绝对关节臂测量机7520型具有精度高、重量轻、使用简单等诸多优势,是目前ROMER 精度最高的关节臂。其技术参数见表1所示。
2.2.2测量过程
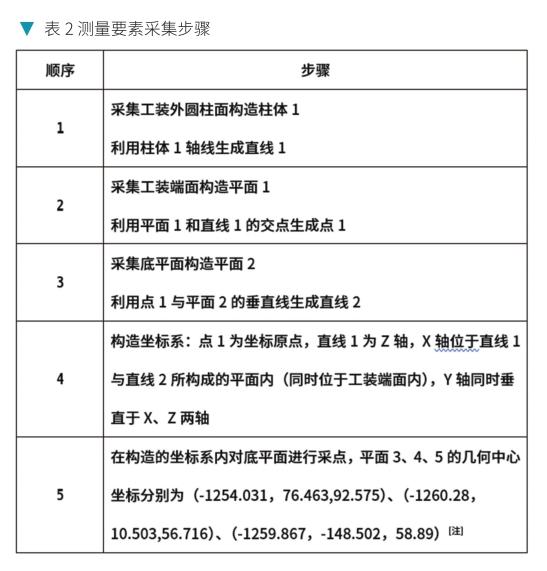
如图4所示,利用PC-DMIS CAD++测量软件,对测量要素进行采集,各要素与实物对照如图5所示,采集步骤见表2。
注:平面3、4、5均为面积很小的三角形,用其几何中心的坐标近似替代单点坐标误差更小。
2.3数据处理
对于采集到的数据,我们将采用三种方法处理以求解空间尺寸。
2.3.1相似三角形法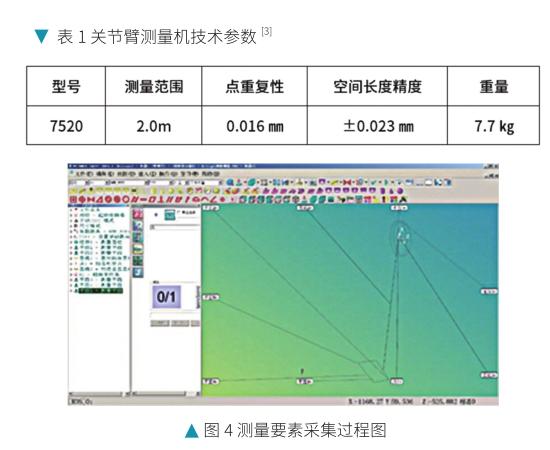
如图6所示,通过测量软件读取点1至平面2的距离为1251.416㎜,又由图纸可知,工装端面至抱夹对称面距离为62㎜,工装轴线与水平面夹角为8.5°。根据三角函数及相似三角形原理,可求解抱夹几何中心至平面2的距离(即空间尺寸)为1242.3㎜。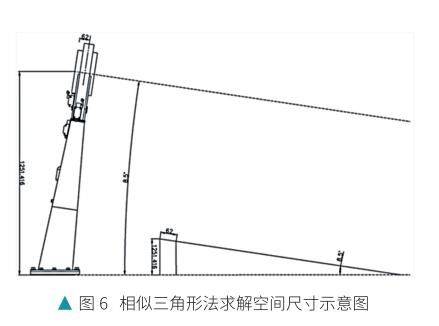
2.3.2解析几何法
式(1)为空间平面方程,式(2)为点到平面距离公式。根据平面3、4、5的几何中心坐标,可求得式(1)中的系数值,将其值代入式(2),其中(x0,y0,z0)为(0,0,62),利用Matlab软件编程求解空间尺寸d为1240.6㎜。
2.3.3三维建模法
利用PC-DMIS CAD++软件将测量要素以igs格式导出后,导入Solidworks软件中并建模,如图7所示,读取空间尺寸值为1242.7㎜。
3结论
三种方法对比来看,相似三角形法因为同时引入62㎜和8.5°两个尺寸,外部引入误差较大;解析几何法数据处理过程较复杂;三维建模法外部引入误差较小,同时数据处理过程简单,相对而言精度及效率更高。从实际结果来看,三维建模法的优势并未完全体现出来,主要原因在于:一是62㎜尺寸不是实测尺寸,引入误差可能较大;二是采点数量较少,样本量不足以减小系统误差,同时测量次数少,随机误差可能较大;三是测量过程未在平台上进行,振动等环境因素引起的误差可能较大。进一步的改进可以围绕上述三个方面进行。
本文以生产实际过程中空间尺寸难于测量为背景,运用先进测量手段,结合数据处理、三维建模等软件技术,为空间尺寸的高效、精确测量提供了新途径。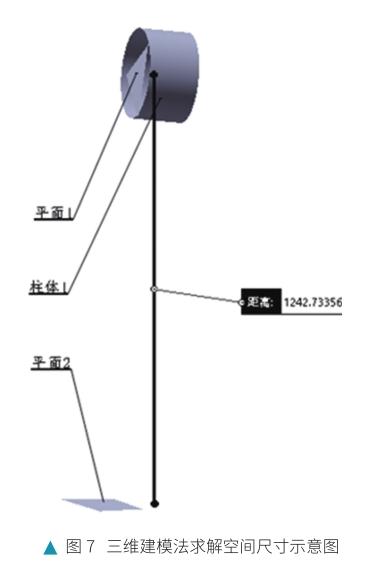
参考文献
[1]殷杰.从珠海航展看国产外贸155毫米车载加榴炮的进步[J].坦克装甲车辆,2019,(1):26-29.
[2]百度百科.155毫米车载火炮[EB/OL]. https://baike.baidu.com/item/155毫米车载火炮,2015-11-26/2018-07-09.
[3]HEXAGON METROLOGY.ROMER绝对关节臂测量机产品样册[M].青岛:海克斯康测量技术(青岛)有限公司,2015.9.
(作者简介:李庆宇:陆装沈阳军代局驻大连地区军代室,助理工程师;高伟:陆装沈阳军代局驻大连地区军代室,工程师)
