一种无人机光电吊舱目标定位计算与误差分析方法
2020-11-25任海波黄迟王水王大为任哲
任海波,黄迟,王水,王大为,任哲
(1.陕西省天然气股份有限公司,陕西 西安 710016;2.西安爱生无人机技术有限公司,陕西 西安 710065)
随着无人机技术的飞速发展,光电吊舱在军事侦察、目标定位、设备导航、空间遥感、灾害预报、资源探测等各方面发挥了越来越重要的作用。利用无人机光电吊舱进行目标定位是一种快速获取目标位置信息的有效技术手段。然而,民用无人机采用的各类传感器的测量精度较低,利用光电吊舱进行目标定位的定位精度受各项误差的影响。有关目标定位技术在学术界和工程应用领域引起了广泛关注,在光电平台目标自主定位与测量、飞行器飞行轨迹测量、航空吊舱目标定位、雷达侦察系统目标定位、星载SAR目标定位、小型无人机目标定位等方面提出了许多有效方法。本文阐述了一种利用无人机坐标、姿态角、航向角及光电吊舱俯仰角、方位角、激光测距值等参数进行目标定位的计算方法,分析了采用该方法进行目标定位计算的误差来源,在此基础上建立了误差计算式,进行了目标定位误差分析。此目标定位计算与误差分析方法可以为实际工程应用提供一定的参考。
1 目标定位原理
无人机载光电吊舱多采用两轴结构,可以实现在俯仰和方位上的转动;吊舱搭载的传感器大多包括可见光、红外、激光测距仪中的两种或三种类型。光电吊舱与无人机固连,在实时侦察作业中,可转动俯仰和方位角,获取目标相对于无人机的俯仰角、方位角和测距值。光电吊舱获取的目标参数与无人机飞行参数一起通过无人机载数据链设备发送给地面站;地面站可根据上述参数解算出目标位置。利用光电吊舱进行目标定位的方法较多,如垂直下视法、针对平坦地区的相对高度法等,本文所讨论的目标定位计算及误差分析方法仅针对具有激光测距功能的光电吊舱。
2 目标定位计算方法
目标定位计算本质上是一个坐标转换过程,无人机及光电吊舱获取的计算参数包括:无人机坐标(经纬度、大地高)、无人机姿态角(俯仰角、滚转角)、无人机航向角、吊舱相对于飞机的方位角、吊舱相对于飞机的俯仰角、吊舱相对于飞机的滚转角(针对两轴吊舱,滚转角为零)、激光测距值,需要求取的参数为目标的坐标(经纬度、大地高)。目标定位计算流程见图1。
2.1 目标点像空间辅助坐标系坐标

图1 目标定位计算流程
光电吊舱获取的实时视频可理解为一帧一帧的照片,建立像空间辅助坐标系见图1,像空间坐标系定义为左手系:原点位于像片中心,X轴指向像片顶部,Y轴指向像片右侧,Z轴向上。坐标系示意见图2,O1-X1Y1Z1。

图2 像空间辅助坐标系示意图
针对吊舱定位计算具体情况,激光测距值为Dis,目标点的像空间辅助坐标表示如下:

2.2 目标点机体坐标系坐标
机体坐标系定义为左手系,原点位于无人机质心,X轴指向机头,Y轴指向飞机右翼,Z轴向上。坐标系示意见图3,O2-X2Y2Z2。

图3 机体坐标系示意图
机体坐标系与像空间辅助坐标系之间的转换关系表示为:

式中,(X2,Y2,Z2)为目标点机体辅助坐标系坐标;(X1,Y1,Z1)为目标点像空间辅助坐标系坐标;(X0,Y0,Z0)为光电吊舱在机体坐标系中的坐标,此值由实际量测得到。A为旋转矩阵,计算式为:

式中,Yaw为吊舱相对于飞机机头的方位角,右偏为正;P为吊舱相对于飞机的俯仰角,抬头为正,低头为负。R为吊舱相对于飞机的滚转角,本文所述的光电吊舱为两轴吊舱,R等于零。K为吊舱安置角改正旋转矩阵。

式中,y为吊舱航向安置角,右偏为正;p为吊舱俯仰安置角,抬头为正,低头为负;r为吊舱滚转安置角,右侧抬高为正。
2.3 目标点站心地平坐标系
站心地平坐标系定义为左手系:原点位于无人机质心;X轴指向子午线方向,指向北为正;Z轴指向过原点的椭球法线方向,指向天顶为正;Y轴指向与XZ平面垂直,向东为正。坐标系示意见图4,O3-X3Y3Z3。
站心地平坐标系与机体坐标系的转换关系为:
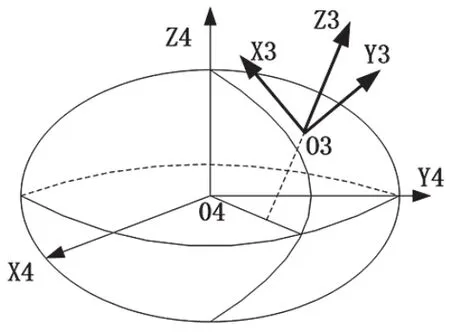
图4 站心地平坐标系与地心直角坐标系示意图
式中,(X3,Y3,Z3)为目标点站心地平坐标系坐标;(X2,Y2,Z2)为目标点机体坐标系坐标;θ为无人机航向角,为无人机俯仰角,为无人机滚转角。
2.4 目标点地心直角坐标系
地心直角坐标定义为右手系:以参考椭球中心为原点,起始子午面与赤道面交线为X轴,在赤道面上与X轴正交的方向为Y轴,椭球体的旋转轴为Z轴。坐标系示意见图4,O4-X4Y4Z4。
站心地平坐标系与地心直角坐标系的转换关系为:

式中,(X4,Y4,Z4)为目标点地心直角坐标系坐标;(X3,Y3,Z3)为目标点站心地平坐标系坐标;B为无人机纬度,L为无人机经度;(XA,YA,ZA)为无人机地心直角坐标,根据无人机纬度、经度、高度计算,由大地坐标系转换得到,此处不做赘述。
3 目标定位误差分析
3.1 误差来源
目标定位计算的主要误差来源表1。

表1 目标定位计算的主要误差来源
3.2 误差分析原理
表1所列举的误差为测量误差,本文对目标定位计算精度进行误差分析的假设前提是上述误差为相互独立的,且误差类型服从正态分布,按误差传播定律计算经坐标转换后的结果误差;另一方面,为了便于计算,在各个坐标转换过程中,不考虑转换结果之间的协方差,将转换结果视为相互独立的观测量,将其误差带入下一次坐标转换中进行计算。
3.3 目标点像空辅助坐标中误差计算
根据公式(1)得到目标点像空辅助坐标中误差的计算式如下:

式中:σX1,σY1,σZ1为目标点像空辅助坐标中误差,σDis为光电吊舱测距误差。
3.4 目标点机体坐标中误差计算
根据公式(2)得到目标点机体坐标中误差的计算式如下:

式中:σX2,σY2,σZ2为目标点机体坐标中误差,σX1,σY1,σZ1为目标点像空辅助坐标中误差,σX2/σX1表示X2对X1求偏导数,其他变量的含义见表1。
3.5 目标点站心地平坐标中误差计算
根据公式(5)得到目标点站心地平坐标中误差的计算式如下:

式中:σX3,σY3,σZ3为目标点站心地平坐标中误差,σX2,σY2,σZ2为目标点机体坐标中误差,σX3/σX2表示X3对X2求偏导数,其他变量的含义见表1。
3.6 目标点定位误差计算
目标点站心地平坐标中误差表示了目标点相对于飞机所在位置的中误差,进一步地,求取目标定位误差需要纳入飞机定位误差,目标点最终定位误差计算式如下:

式中:σXT,σYT,σZT为目标点定位中误差在北、东、高三个方向上的分量,σX,σY,σZ为无人机定位误差在北、东、高三个方向上的分量,σX3,σY3,σZ3为目标点站心地平坐标中误差。为了便于表达,利用目标点定位中误差在北、东计算目标定位平面误差,其计算式如下:

3.7 编程实现与实例计算结果
采用C#语言编程实现了本文所述的无人机光电吊舱目标定位计算与误差分析方法,程序运行界面见图5。

图5 光电吊舱目标定位误差分析程序界面
当各个误差项的中误差为确定值时,飞机俯仰角、滚转角、吊舱测距值与吊舱俯仰角对目标定位误差影响较大,考虑到实际飞行中飞机俯仰角、滚转角均在相对较小的范围内变化,本文只给出吊舱测距值与俯仰角变化时平面误差的计算值,见表2。表2中的计算值约束的参数条件如下:,,,,,,,飞机俯仰角=0°,飞机滚转角=0°,此参数条件具有较强的实际指导意义。
从表2中可以看出,激光测距值对吊舱定位平面误差的影响远大于吊舱俯仰角对平面误差的影响,适当地减小无人机与目标之间的距离,可有效提高定位精度。因此,在实际应用中,若要满足定位精度小于10m的要求,目标与无人机的距离需约束在300m以内(在本文所指的计算约束条件下)。
4 结语
本文阐述了一种利用无人机光电吊舱目标定位计算及误差分析方法,并对该方法进行了编程实现与实例分析。通过实例分析可知,激光测距值对吊舱定位平面误差的影响远大于吊舱俯仰角对平面误差的影响,适当地减小无人机与目标之间的距离可有效提高定位精度。本文定位计算与误差分析方法可为相关工程应用提供一定参考。值得指出的是,本文在误差分析的过程中,为了便于计算,未考虑转换结果之间的协方差,对定位精度计算的准确性具有一定影响,后续需要继续对其展开研究。

表2 吊舱俯仰角与测距值对平面误差的影响
