开放式载人月球车人机交互系统的人机工效学设计
2020-11-24邱新安段福伟王禺林
朱 博,周 震,邱新安,段福伟,陶 院,王禺林
(兰州空间技术物理研究所,真空技术与物理重点实验室,兰州730000)
0 引言
月球表面为真空环境,且温度变化范围极大(-180~150℃),表面崎岖起伏。大多数的月球探测研究需进行月面地质勘探,从不同地点采集月球岩石和土壤样本并带回登月舱[1]。而航天员穿着笨重的舱外航天服进行舱外作业时行动极为不便,如果能用月球车代步,将为月球探索工作提供便利、提高效率。开放式载人月球车具有体积小、重量轻等优点,可搭载航天员和设备进行中短距离移动,且对火箭运载能力和着陆舱容纳空间的要求较低。20世纪60年代美国“阿波罗”系列载人登月活动中就使用了此类月球车。
月球表面没有大气存在,开放式载人月球车将直接暴露在宇宙辐射之下,故航天员驾驶月球车的全过程必须穿着舱外航天服。而舱外航天服体积和质量很大,对航天员操控月球车的动作有很多约束和限制;另外面对月球未知地形,行驶环境的特殊性也会给航天员造成很大的困难[2]。因此,开放式载人月球车人机交互系统的优化设计必须充分考虑由月球表面特殊环境造成的复杂工况,并且提升月球车的驾驶便易性和安全性。
本文梳理出开放式月球车人机交互系统的功能需求,然后开展人机交互系统的方案设计,包括显示面板布局、灯光控制和操控设备的设计,最后给出设计验证结果。
1 人机交互系统功能需求分析
开放式载人月球车的人机交互系统主要包括信息显示、车辆操控、通信控制、照明控制[3]。同时由于月球车采用开放式结构,人机交互设备直接暴露于月球环境中,为保证产品安全性和可靠性,车载人机交互设备设计应达到较高防尘等级和碰撞防护等级要求。
1.1 显示需求分析
月球车上需要显示的信息主要包括车辆状态信息、车辆周边环境信息、工作区域月面形貌信息、车辆位置信息、目标位置信息、行驶状态信息、车辆驾驶模式、车辆控制模式等8个部分[4]。此外还应包括航天员的关键生理指标信息。
车辆的状态信息主要包括车载电池的实时剩余电量和健康状态(包括温度、最大容量、电压、电流)以换算出续航里程,车载传感器的健康状态(包括温度和受损程度),电机的健康状态(包括温度和受损程度),车辆灯光是否打开、是近光还是远光,车身的倾斜角度(包括左右方向的倾斜和前后方向的倾斜)。周边环境信息主要是针对较大的岩石、较深的月坑、路径的坡度,以图形加数字的形式向航天员做出提示[5]。位置信息包括月球车和目标地点相对着陆舱的极坐标位置。行驶状态信息显示速度和里程。
航天员出舱后,可以利用舱外航天服内的各种传感器来监控航天员的各项生理指标,包括航天员的脉搏、体温和血氧含量等,这些信息也需要显示。
1.2 操控需求分析
月球车开展月面巡视与勘察任务时,应具有一定的自主能力,包括自主导航、定位、路径规划与避障等功能。为此,月球车移动系统需要实现有人驾驶、远程遥控和自主导航共3种操控模式[6]。
有人驾驶操控模式时,月球车前进和后退的切换方式应简单可靠,避免引起误操作。传统的方向盘设计需要两只手操作实现方向控制,同时前进、后退、刹车等操作需要再单独设计其他装置来实现,不适用于身穿厚重航天服的航天员操作;而飞机式的控制手柄更适合借鉴以完成月球车的全电传控制,即,航天员通过对操作杆的推、拉、左拨、右拨等操作就可以控制月球车的前进、后退、左转和右转,实现车辆的运动操控[7]。
1.3 需求分析小结
基于上述功能需求分析,载人月球车人机交互系统的显示需求可以利用独立的显示面板来实现,而操控需求可以利用飞机式的控制手柄来实现。由于载人月球车的空间有限,而且航天员要身着厚重笨拙的舱外航天服上、下月球车,所以月球车必须无多余障碍结构,符合舱外航天服的人机工效学要求。因此本文的重点就是在考虑航天员上下车便捷性的前提下,进行人机交互系统的架构布局设计。
2 人机交互系统设计方案
2.1 系统设计方案
人机交互控制单元是载人月球车人机交互系统的核心部分,负责数据的计算与处理[8],外设有显示面板、车辆操控手柄、灯光控制系统、按键阵列(如图1所示)。

图1 月球车人机交互系统框架Fig.1 Frame work of human-computer interaction system of the lunar rover
2.2 显示面板
月球车显示面板采用整体布局、分块显示的设计思想,采用双屏拼凑设计,既提高了各显示内容的可靠度,又有效避开了单屏设计中“一损俱损”的缺点;采用可收纳、可对折式的布局方式,既充分考虑到月球车的结构,尽可能减少占用空间,又方便了航天员上下车。人机交互中控台位于正、副驾驶两个座椅之间,显示面板从两座椅之间转出。显示面板周围布置若干个实体按键,用于对面板上内容的选择。
显示面板安装在一套可伸缩的机械连杆上。发射前的初始状态下,显示面板和机械连杆一同被收纳在驾驶员座椅下方,此时两块显示面板呈展开状态,面朝车头方向(如图2所示)。月球车使用时,航天员站在车外即可手动打开显示面板锁紧装置;在涡卷簧作用下,曲柄带动两块显示面板从两座椅间转出;曲柄为可调节伸缩杆,沿曲柄轴向调节伸缩量即可调整显示面板高度,同时在角度限位器的作用下可调整显示面板可视角度(如图3所示);最佳高度和角度确定后,航天员手动将两块显示面板面对面折叠,以方便航天员从车辆两侧上车入座;航天员入座并将自身固定好后,再手动将显示面板展开。

图2 显示面板发射前固定位置Fig.2 Fixed position of the display and control panel before launching

图3 显示面板转出及伸缩过程Fig.3 Rotation and expansion process of the display and control panel
2.3 灯光控制
为满足月球车在月球表面各种不同环境工作的需求,月球车应具备健全的照明控制系统。该系统可对月球车照明灯光进行统一管理,并提供自动控制和手动控制选择。
自动控制状态下:光线传感器实现对环境光的检测,并通过对测量数据的分析实现光线亮度的调节;照明系统在车辆静止或低速行驶时切换为近光模式,在车辆运行过程中自动切换为远光模式(如图4所示)。在照明系统工作过程中,可通过控制面板按键进行自动/手动控制模式的切换,同时可通过面板按键和旋钮对照明亮度进行手动控制。
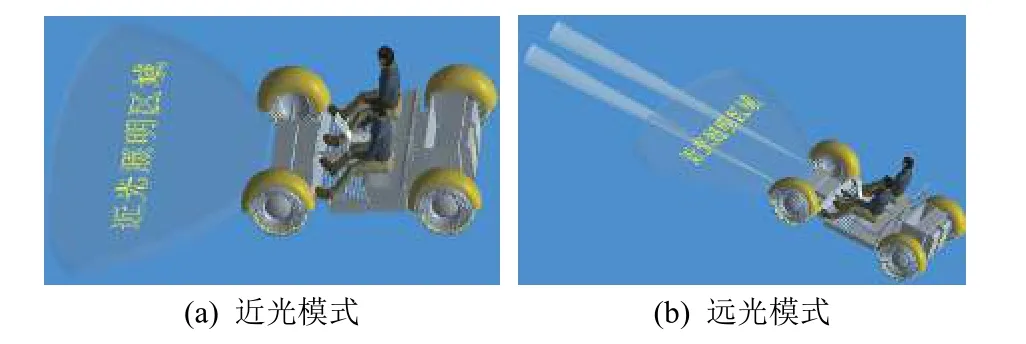
图4 照明模式示意Fig.4 Schematic diagram of lighting modes
2.4 操控设备
驾驶手柄是月球车移动的重要操控设备之一,可以控制4个驱动电机、2个转向电机和制动器;实现推杆前进、拉杆制动(切断驱动电机电源并同时启动机械制动器)和左右摆动转向,以及激活手柄上的反向开关实现倒档,完全拉回手柄就是手刹。
2.4.1手柄功能设计
手柄具有力反馈功能,可使航天员在控制月球车速度时感觉更直观,作为配合月球车速度显示的参考[9]。手柄的力反馈机构采用DELTA机构,该机构性能稳定可靠,可以满足发射过程中较大程度的振动冲击要求,同时满足月球车在崎岖路面行驶要求[10];另外该机构有效运动空间较大,通过设计限制其轴线方向的自由度,保留其另外两个方向上的平动自由度,利用力反馈算法提供实时有效的力反馈,能更好地满足航天员的操控需求[11]。
手柄还具备安全示警功能:当月球车距离基地距离超出航天员可步行安全返回基地的距离时,力反馈手柄可实现持续时间为5 s的连续抖动,为航天员提供感知示警[12]。
2.4.2手柄握持设计
驾驶手柄要考虑人体工效学要求。航天员身着加压、厚重的舱外航天服手套操作,需要很大的腕力实现加速和制动所需的细微动作。因此,宽大的T型手柄更适合操控。手柄材料采用非金属材料,手柄外缘设计光滑滚花状结构,增加航天员握持摩擦力,同且对航天服磨损较小;手柄两端设计圆滑过渡凸起,防止航天员操作时手从手柄两端滑脱。
根据航天员着着舱外航天服手套时的手部轮廓尺寸,手柄的抓握直径设计为20~30mm,抓握长度为150~200mm,手柄握持部分距安装面高度应≥65 mm。为便于航天员握持和操作,月球车驾驶手柄设计成椭圆形状,其短轴直径为22mm,长轴直径为26 mm,握持部分长度为170mm;手柄握持部分距离手柄安装面100 mm。
通过分析,提出了以下3种手柄设计方案,如图5所示。
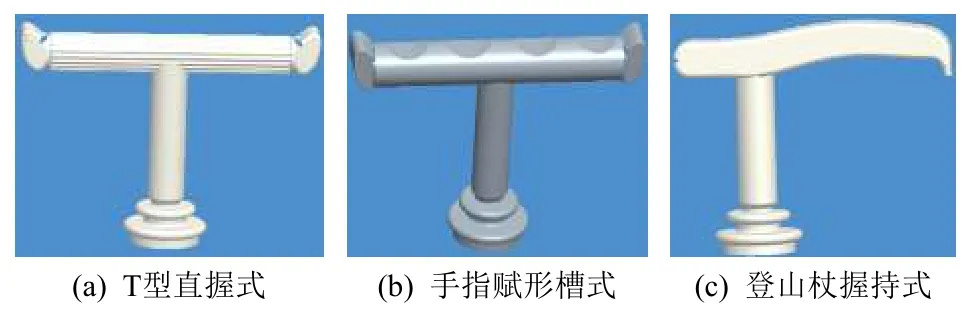
图5 3种手柄设计方案Fig.5 Three candidate typesof the handle
2.4.3手柄操控设计
月球车的操控手柄采用主备份设计,其中:主控手柄为力反馈手柄,可控制月球车的前进、后退、转向、刹车等[13];备份手柄为霍尔型设计,为副驾驶位置航天员提供操作月球车的前进、后退、转向、刹车等操作,可替代主控手柄,或与主控手柄协同完成月球车的运动控制[14](如图6所示)。
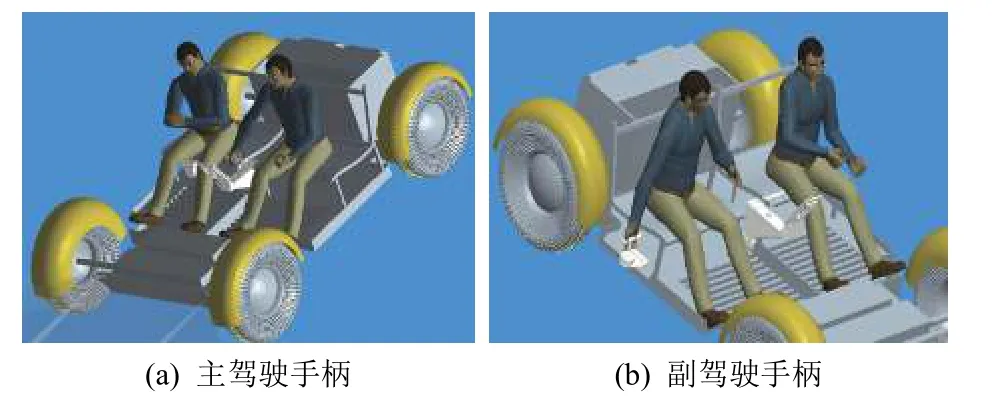
图6 手柄操控示意Fig.6 Sketch of the handle’soperation process
2.4.3.1前进模式
1)速度控制
当航天员向前推动操作手柄时,月球车前进,操作手柄在正前方向的移动距离控制月球车的前进速度。手柄前向运动0~3mm 为控制死区,当手柄在该区域内时,月球车速度为0;手柄前移20mm时,对应每个车轮驱动电机约50%的占空比,即月球车处于最高速度的50%;当手柄前移30mm 时,月球车前进速度最大。当航天员手脱离手柄后,月球车保持选定的速度前进。
以航天员着舱外航天服拨动小型开关的操作力为依据,设计手柄操作反馈力范围为3~15 N,可使航天员操作手柄时有明显的力反馈触觉,同时最大程度减轻航天员操作疲劳。
2)减速和刹车
航天员向后移动操作手柄时为对月球车进行减速和刹车制动,手柄反向移动距离在3~20mm范围内为月球车减速控制区域,手柄在该区域时可控制月球车逐渐降低速度;在20~30mm 范围内为刹车制动。减速和刹车制动时手柄的操作反馈力为15~30 N,该操作反馈力略大于操纵手柄前进时的反馈力,且满足航天员着舱外航天服操作力需求,可以为航天员的刹车速度提供有效的力反馈,避免月球重力环境下航天员刹车过快。
3)转向控制
航天员操作手柄向左或向右移动来控制月球车向左或向右转向,手柄移动距离按比例调节车轮转动角度:在0~3mm 为月球车转向控制死区;位移在3~20mm 操作反馈力随位移线性增加,当手柄向两侧移动位移约20mm 时,会遇到软停止,需增加一个5 N 的阶跃力,使手柄进一步向外移动以增加转向角。通过软停阶段后,手柄的操作反馈力随着手柄的位移线性增加,以使航天员更加合理控制月球车的转弯半径。
月球车的转向功能必须在车辆速度≤1 km/h时才能执行;当车速>1 km/h 执行转向功能,车辆则会自动制动。
2.4.3.2后退模式
航天员通过控制台上的模式转换开关实现月球车从前进模式到后退模式的切换。模式转换开关的形状和尺寸均按照航天员着舱外航天服时手部的尺寸和活动范围设计,便于航天员进行切换操作。
航天员完成模式切换后,通过向前推操作手柄控制月球车的后退速度,操作手柄的力反馈功能可以使航天员在不观察显示面板上的速度显示的情况下实现对月球车倒车速度的触觉感知。同时对月球车后退的最大速度加以限制,保证倒车过程中航天员人身安全。后退模式下的速度控制与前进模式下的相同。
3 人机工效验证
为验证开放式月球车的人机交互系统是否符合航天飞行人–系统标准[15]的人机工效学要求,对涉及到的人机交互项目进行了逐一复核,建立了指标符合性矩阵,如表1所示。验证结果表明,开放式月球车人机交互系统方案所涉及的人机交互项目均满足航天飞行人–系统标准中的相关要求,可以进一步开展人机交互系统的详细设计。
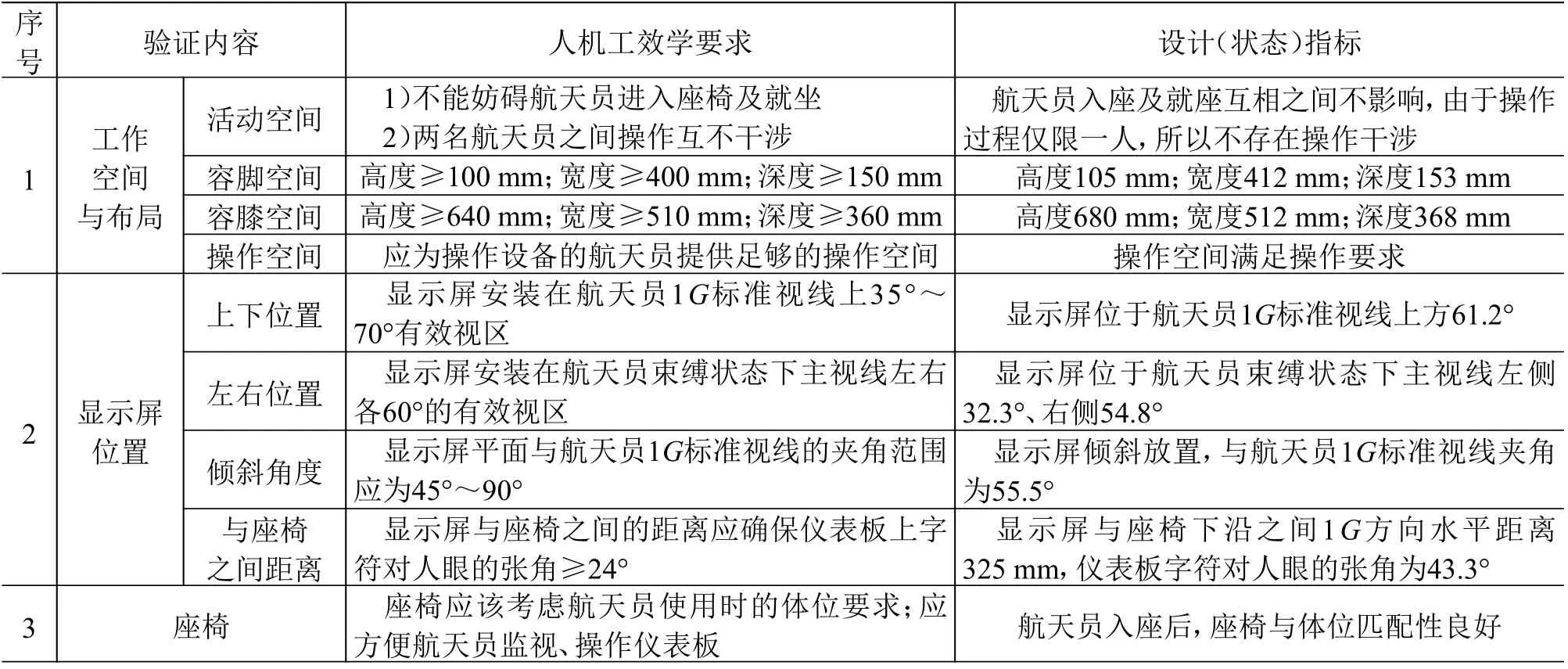
表1 开放式月球车人机交互系统人机工效学符合性验证表Table 1 Ergonomic compliance of the open-roof human-computer interaction system for the lunar rover
4 结束语
本文在总结国外月球车研制经验的基础上,分析了我国开放式载人月球车人机交互系统的功能需求,进而提出了“可收纳、可对折式”的显示面板布局方式,并从显示面板、灯光控制、操控设备等方面完成了人机交互系统的方案设计。由于开放式月球车上的人机交互仪表设备将直接暴露在月球表面的真空、剧烈冷热交变的极端环境中,因此下一步工作将重点开展面对真空低温环境应用的工效学设计。
