基于STM32的四轴飞行器设计
2020-11-23余亮项平平
余亮 项平平

摘 要: 设计一种四轴飞行器。该飞行器由四片桨叶提供飞行升力,调节电机转速控制飞行姿态与路径。采用PIXHAWK2.4.8核心开发板,STM32处理数据,陀螺仪解算姿态,电调驱动无刷电机,实现电机转速调节,控制飞行姿态,实现常规姿态飞行。
关键词: 飞行器;PIXHAWK;STM32;无刷电机
中图分类号: TP29-AD 文献标志码:A 文章编号
1 引言
四轴飞行器具有体积小、灵活度较高、操控简单等众多特点,应用前景广阔 [1]。其未来可能发展成为新概念交通工具,或者用于安保以及高危环境作业等,普遍走进人们的日常生活之中。
2 系统总体分析
本设计以单片机STM32F427开发板为核心器件,STM32F103C8T6为系统I/O口,配合电阻电容等器件,完成最小系统搭建。其余模块围绕PIXHAWK开发板核心部分工作。开发板中具有诸多传感器可供系统控制使用,主要包含128K非易失闪存FM25V01元器件,TXS0108通用电平驱动芯片,LTC4417电源管理芯片,MIC5332超低压降传感器,BQ24315电池管理芯片,TCA62724三色LED芯片,LT3469运放, M8N传感器,5V供电电源为等。硬件结构示意图如图1[2][3]。
3 硬件设计
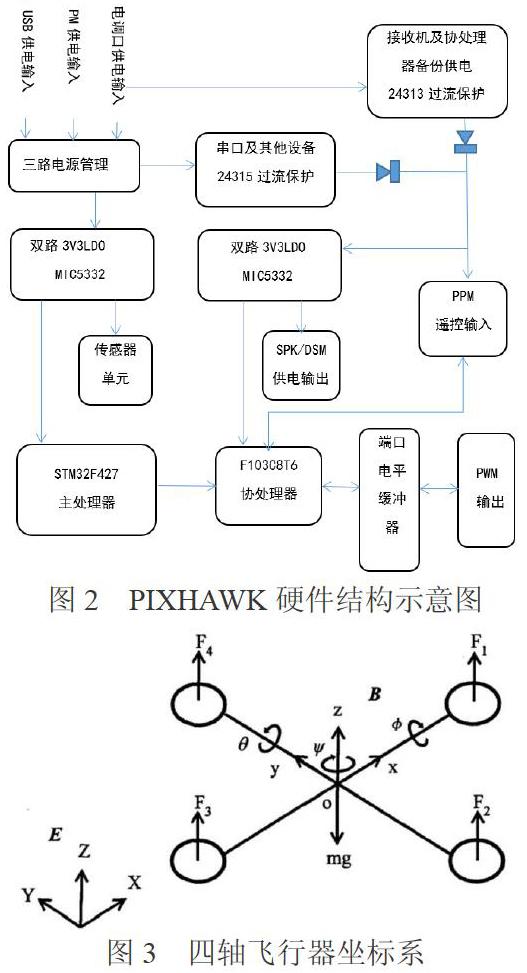
系统开发板上部分传感器已焊接完整,留有部分引脚以方便连接外设传感器。处理单元由STM32F427VIT6(168 Mhz工作频率、256KB RAM工作内存与2MB的flash闪存100Pin)与STM32F103C8T6故障保护协处理器构成,其具有四十八个引脚,用来控制输入信号采集与输出信号发射,其晶振频率为24MHz。开发板中带有多个传感器,包括16位陀螺仪STL3GD20为整个系统提供实时角速度数据;14位加速度计电子罗盘STLSM303D测量飞行器加速度以及方向;MEASMS5611气压高度计起到测量飞行器飞行高度的作用;InvenSence MPU6000三轴加速度计/陀螺仪采集姿态变化。开发板硬件结构图如图2。
4 软件设计
系统可由NuttX实时操作系统、中间件和飞行控制栈构成。NuttX操作系统可以完成对底层任务调度;中间件运行在操作系统上,操作系统为所有的设备驱动程序和uORB机制实现开发板内部异步通信。中间件的飞行控制栈可控制软件栈;飞行控制栈分为位置姿态估计和决策导航两部分,决策导航部分通过判断自身状态与接收机指令,确定自身的工作模式;位置姿态估计是通过传感器得到位置、姿态信息。据此控制部分才能既快又稳的达到期望位置姿态。执行控制器输出部分由MIXER、执行器和PWM组成[4]。图3是机体的两坐标系,左侧为惯性坐标系,右侧代表物体三维空间坐标。。
四轴飞行器的姿态控制是解决其自身坐标系与地球坐标系之间的相对位置问题。因为地球对于飞行器而言过大,所以地球坐标系固定不变。设北、东、上三个方向建立三维坐标系R,另一个r坐标系为飞行器自身。用欧拉角和四元数等算法解算两个坐标系之间的角位置关系。而姿态解算的欧拉角和四元数公式中的各个参数,都是由各个传感器实时提供,其解算数据来自陀螺仪、加速度计和电子罗盘,将所有数据分析处理后,可换算成飞行器的相对位置关系和实时空中姿态。比如陀螺仪中的三轴加速度参数就可以由四元数算法解得飞行器当下姿态参数中的三个角度,roll、pitch和yaw。加入三轴地磁和三轴的加速度后,就可以完成传感器实际过程中的零点漂移、温漂等数据补偿,再通过更深度的解算得到更加准确的姿態参数。
5 结语
通过对各类飞行器所需硬件搭建、软件编程开发,完成飞行器复杂飞行过程中模型仿真,通过调试,实现了对四轴飞行器电机的实时控制,完成飞行器各个姿态运动,实现了其基本飞行功能。
参考文献:
[1]程学功. 四轴飞行器的设计与研究[D].杭州电子科技大学,2013.
[2]祁芳超. 基于PIXHAWK的小型固定翼的飞行控制研究[D].沈阳航空航天大学,2017.
[3]于雅莉,孙枫,王元昔.基于多传感器的四旋翼飞行器硬件电路设计[J].传感器与微系统,2011,30(08):113-115+123.
[4]刘焕晔. 小型四旋翼飞行器飞行控制系统研究与设计[D].上海交通大学,2009.
基金项目:淮南师范学院2019年度“支持百名优秀学生课外科技实践创新活动基金”项目--基于STM32主控四轴智能飞行器自动定点投放快递的设计与应用
