基于视频处理的电动平车导航驱动系统研究
2020-11-23张涛贾相武付杰
张涛 贾相武 付杰
摘要:基于视频处理的电动平车导航控制系统采用视频图像的分析处理进行路况分析,不需要铺设专用的轨道和磁极等辅助设施,在地面用油漆喷涂黑白相间的路线等符号,简化现场设施要求和降低平时保养的成本;可以安装普通的摄像头,检测地面标识;数据处理采用可靠的算法,简单有效,结合常用防撞设备,不需要额外的辅助导航配件,就可以分析判断轨道,进行跟踪导航,基于优化算法应用,进一步提高了系统的可靠性,比较适用于现代工厂在厂房内部大吨位、慢速度的搬运工作。
关键词:视频处理 ; 自动导航 ; 电动平车
前言:
无轨平车相比于有轨平车,不需要铺设轨道,机动性更强;对于原有的使用场地布局不需要做任何的改变,实用性更好。在使用过程中,因车辆可以直行也可以转弯,需要有专人进行操作,尤其是倒车行驶的时候,操作难度大,容易出现操作失误,造成刮擦等问题;本文提出一种基于视频处理的电动平车导航控制系统,不需要铺设专用的轨道和磁极等辅助设施,在地面用油漆喷涂黑白相间的路线等符号,简化现场设施要求和降低平时保养的成本;实现应用于无人控制,通过视频处理具有防撞等功能,大大减少驾驶平车时存在的安全隐患问题,为电动平车的使用提供了很大的便利[3-6]。
1.视频处理电动平车导航系统特点
厂房内的物品搬运,为使用方便,大量使用电动平车;电动平车体积大,吨位高,驾驶技术要求较高;当前也在开发各种带自动导航功能的电动平车;应用的导航方案主要有磁导航、红外导航、激光导航等方案;磁导航需要铺设专用的磁体轨道,在一些厂区里存在消磁的风险,并且轨道后续维护成本较高;红外导航轨道铺设成本较低,但光照变化较大,平车的体积也较大,红外导航干扰源很多,稳定性不够,一般作为辅助导航,当前研究较多的是激光导航,但激光传感器价格高昂,对安装位置也有很多要求。基于视频处理的电动平车导航控制系统装置,可以安装普通的摄像头,检测地面标识;數据处理采用可靠的算法,简单有效,结合常用防撞设备,不需要额外的辅助导航配件,就可以分析判断轨道,进行跟踪导航,基于优化算法应用,进一步提高了系统的可靠性,比较适用于现代工厂在厂房内部大吨位、慢速度的搬运工作。
2.基于视频处理导航系统的架构设计
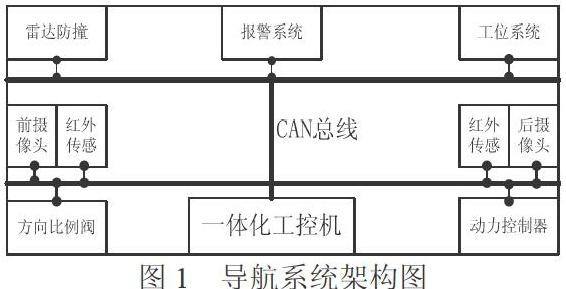
本文提出的基于视频处理的电动平车导航控制系统,可以实现电动搬运平车在厂区的自动运行,可以根据工位设定,自动寻轨,运行于设定好的工位,实现无人控制,并且具有防撞等功能。主要架构如图1所示,包括摄像头、红外传感器、控制板、驱动板、雷达防撞检测、地面路线和工位标识等设备。
摄像头主要拍摄地面路线和工位标识,转换成数字信号传递给控制板进行处理;由于电动平车的体积特别大,并且要满足前进和后退两个方向运动,所以采用前后双摄像头的方案,可以保障车辆稳定可靠的运行;
3.视频处理程序设计
视频导航的设计主题是车辆轨迹的图形识别技术;本系统采用一体机式的计算机,可以安装操作系统,便于视频的软件处理、轨道辨识。
3.1视频处理算法优化
视频运动目标的自动检测在视频分析、视频编码、视频检索以及视频监控等视频信号处理中起着极为重要的作用。视频运动目标的主要特征是与背景有着不一致的运动,因此,必须利用某些类型的运动信息:如光流场、变化检测或差分图像。基于光流场的检测算法对噪声非常敏感,并且光流场估算的计算量大,不适合实时应用。基于变化检测的算法通常假设镜头噪声符合高斯分布,由镜头噪声所引起的帧间差可用标准的高斯分布描述,而运动目标产生的帧间差经常非高斯分布,因此运动目标的检测相当于从高斯信号中检测非高斯信号,用基于假设检验的统计算法或高阶统计区分运动目标与背景区域。差分图像是用来检测帧间运动或变化的常用形式,可以是邻帧图像的差分,也可以是当前帧与建模背景图像的差分,分别称为帧间差和背景差。目前利用差分图像检测前景与背景的方法有阈值化法、基于假设检验的统计算法、高阶统计法等。
3.2二值化处理
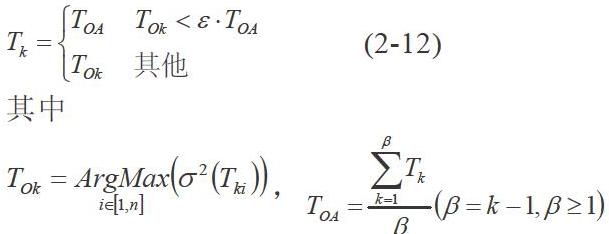
当前景与背景灰度差异不明显时,Otsu法阈值化的结果可能会导致误检测,故在Otsu法的基础上,本文采用初始值设定结合平均最优阈值的方法,获得最终的二值化阈值。设由常规Otsu法求得的当前背景差图像的最优二值化阈值为,定义改进后Otsu的最优二值化阈值为,则表示为:
即为前个值的非零最优二值化阈值的均值,当时,则值可选取适当的初始阈值。这里为一个权系数,可取经验值区间为[0.5,1]。为了进一步说明本节算法,本节对某一视频序列(共60帧)的背景差图像进行了自适应阈值化实验。
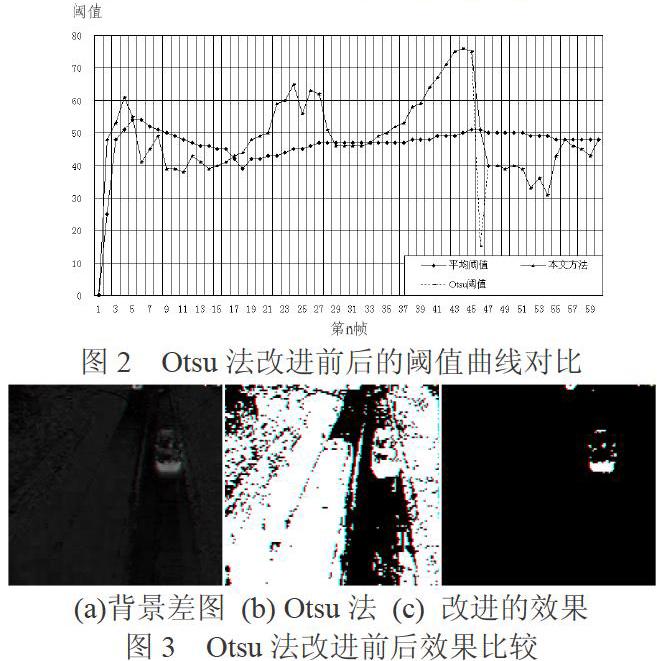
从图2可以看出,当采用原始的Otsu法对该视频测试序列的第46帧图像进行阈值化时,出现了阈值为15的失效值,改进后的算法选用平均阈值作为二值化阈值。图3(a)为第46帧所对应的背景差图,从图中可看出此时前景和背景的灰度差异不明显,此时,原Otsu法的阈值失效,如图3(b)所示。图3(c)示意了本节改进Otsu算法的阈值化效果,此时的阈值化结果较为合理。本节改进的Otsu算法适用于类似图3的场合。
4.实验结果
根据算法设计一套实验平车,行驶路线铺设黑白相间的油漆,便于摄像头的拍摄,摄像头采用常用的720P或1080P高清接口,摄像头拍摄轨道发送给小型工控机.。
视频处理采用优化算法计算,获得的轨迹图形如图4所示,有效应对阳光干扰、图形偏差等干扰进行处理。
采用视频处理的技术,试验10吨的电动搬运平车实验条件,实现10的运行效果,具体车辆和轨迹如图5所示。
5.结论
本文基于视频处理的电动平车导航控制系统装置,在车间铺设黑白相间的轨道,对光照和环境的抗扰度很好,成本较低;计算机算法也较简单,通过优化的Otsu算法可以提高系统二值化轨迹识别,具有结构简单、安全性高、成本较低的特点,非常适合电动平车的应用场合。
参考文献:
[1]王晨.无人驾驶智能车控制与规划系统的设计与实现[D].上海:上海交通大学.2009
[2]宣寒宇,刘宏哲,袁家政,李青,牛小宁.一种鲁棒性的多车道线检测算法[J].计算机科学.2017(11):305-313
[3] 梁朱冬,陈洪洋.全桥[J].汽车实用技术.2017(15):98-100
[4] 宋哲, 王友仁, 鲁世红, 王强.一种电动车用无刷直流电机混合回馈制动控制方法[J].电工技术学报.2016Vol. 31(6):74-80
[5] 张志锋.智能电动小车结构与驱动控制系统总体设计[D].成都:西南交通大学 2017
[6] 张剑锋,樊晓松,曹宝健,李卓阳,俞开元,吕成浩.一种试验车辆远程监控系统设计[J].工制计算机. 2009(08):33-34
[7] 姜福先.无人车远程指挥和监控系统软件设计[D].南京:南京理工大学 2009
[8] 张涛,朱小平.基于LLC变换器的电动汽车充电机设[J]电气技术.2016Vol. 17(6):97-100
作者简介:
张涛(1980-),男,硕士研究生,工程师, 主要从事电力电子与电力传动方面的研究。
浙江省教育厅科研计划项目(Y201635811)
