基于无迹卡尔曼的分布式电动汽车状态估计
2020-11-23何昊文
何昊文


摘 要:为了较准确地获取分布式电动汽车的状态信息,满足汽车稳定性控制的要求,文章以三自由度车辆动力学模型为基础,建立了基于无迹卡尔曼滤波的分布式电动汽车状态观测器,对双移线工况下分布式汽车的纵横向车速、横摆角速度、质心侧偏角进行了预测估计。
关键词:分布式电动汽车;无迹卡尔曼;横摆角速度;质心侧偏角
中图分类号:U469.7 文献标识码:B 文章编号:1671-7988(2020)20-11-03
Abstract: In order to obtain the state information of distributed electric vehicles more accurately and meet the requirements of vehicle stability control, this paper builds a distributed electric vehicle state observer based on the unscented Kalman filter based on the three-degree-of-freedom vehicle dynamics model. The longitudinal and lateral vehicle speed, yaw rate and side slip angle of the distributed vehicle under the double-line shifting condition are predicted and estimated.
Keywords: Distributed electric vehicle; Unscented Kalman; Yaw rate; Slip angle
CLC NO.: U469.7 Document Code: B Article ID: 1671-7988(2020)20-11-03
前言
分布式驱动电动汽车作为电动汽车的重要类型,相比于传统集中式驱动电动汽车来说,其电机驱/制动力矩独立可控,且控制精度高,响应更加迅速,可以实现更好的主动安全控制[1]。
卡尔曼滤波观测器可以根据系统预测值和测量值相融合,实时估算观测器的反馈矩阵,并对噪声进行抑制或滤波。卡尔曼滤波算法主要有普通卡尔曼滤波(CKF)、扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)[2],CKF 仅适用于线性系统,EKF 通过对非线性系统进行离散化处理,将其转化为线性系统,UKF采用无迹变换的方式处理非线性系统,具有无需求解雅可比矩阵、计算精度高和稳定性好的优点。本文选用 UKF算法对分布式驱动汽车的状态信息进行预测估计。
1 车辆动力学模型
考虑车身的纵向、侧向、横摆运动的三自由度整车动力学模型,如图1所示:
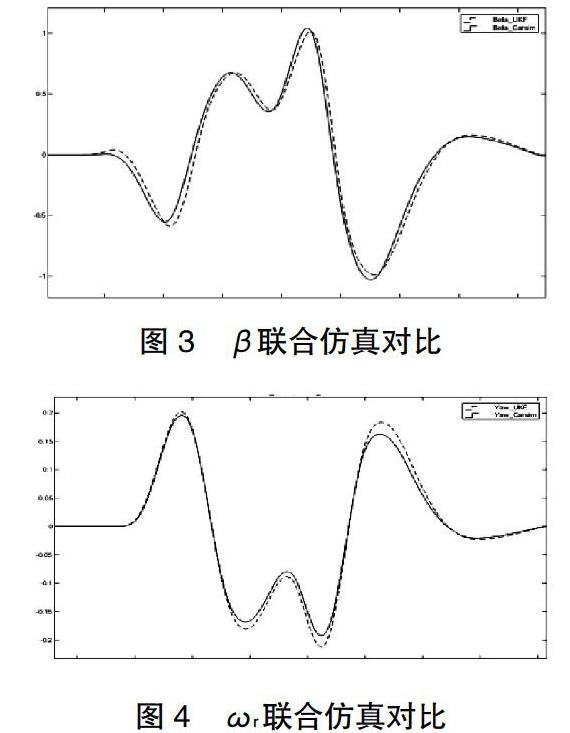
车辆从原地开始起步加速,7s时以60km/h的速度开始进入双移线工况,并且在双移线过程中保持继续加速,16s时双移线结束,此时车速为120km/h,整个双移线过程中质心侧偏角和横摆角速度均可以较好的跟随实际值,在较大的峰值处略大于实际值,这是由于忽略了悬架等其他部分的影响。
4 结论
本文基于三自由整车模型建立了基于UKF算法的分布式驱动電动汽车状态观测器,在已知车轮转矩和轮胎侧偏处于线性区域内能够较好的预测估计汽车的状态信息,为汽车的稳定性控制提供较好的基础。
参考文献
[1] 张一西,马建,赵轩,张凯,刘晓东.基于蚁狮算法的UKF车辆状态参数估计器.中国公路学报.
[2] 宋义彤,舒红宇,陈仙宝,靖长青,郭成.分布式电动汽车状态与参数无迹卡尔曼滤波估计[J/OL].机械工程学报.
[3] 王志威.分布式电驱动车辆状态及参数联合估算研究.浙江大学专业学位论文2020(4).
