装配式建筑施工塔机通信系统及设计研究
2020-11-23余浩浩吴玉厚石怀涛
余浩浩,吴玉厚,石怀涛
(沈阳建筑大学 机械工程学院,辽宁 沈阳 110168)
现阶段我国工业化建筑发展十分迅速,国务院提出“力争10年时间左右,使装配式建筑占新建建筑的比例达到30%”。与传统建筑相比,建筑工业化通过标准化设计、预配件工厂化生产、机械化施工,不仅大大缩短了工期,而且极大程度地减少了施工人数,提高了劳动生产率,降低了劳动力成本。但目前在工业化建筑施工中,仍采用传统施工技术及装备,这样存在自动化程度低、劳动强度高、效率低、安全保障困难等问题,难以满足工业化建筑施工需求,已经成为制约工业化建筑发展的瓶颈之一。
随着我国大力推广装配式混凝土建筑,研发适用于装配式建筑施工的专用技术及系统,提高施工效率与安全,已成为我国建筑工业化发展的迫切需求。自动化施工中,需要利用传感设备从施工现场采集构件温度、变形、受力、设备运行及现场施工状况等,反映施工中各种施工生产要素及其状态的有用信息的数据。稳定高效的通信系统将施工所需数据准确及时地采集和传递,从而为项目决策和控制提供基础数据,以利于自动化施工和管理。
自动化施工过程涉及很多传感器数据通信环节,传统建筑施工通信系统主要通过有线方式,原理相对简单,技术比较成熟,但每个动作都需要有线电路和设备可靠连接。有线通信系统很多的电气辅助元件及引线增加了建设维护成本,相比较于无线通信系统,在功耗、功能等方面有很大的发展局限性。
在实际工程应用中,无线通信方式有Bluetooth、WiFi、Zigbee、NFC、LoRa技术等。采取3G/4G移动通信网络或者ZigBee网络通信技术,这种方式的通信系统中节点扩展不灵活、远距离传输干扰大等问题,在检测传感器数量大的时候成本也很高。根据实际需要及各个无线通信技术功耗与传输距离对比(如图1),通过工况环境的实地考察,针对以上情况,结合LoRa网络的远距离、低功耗、高性能,支持大规模组网特性,研究确立了使用LoRa系统作为现场数据传输的无线链路。
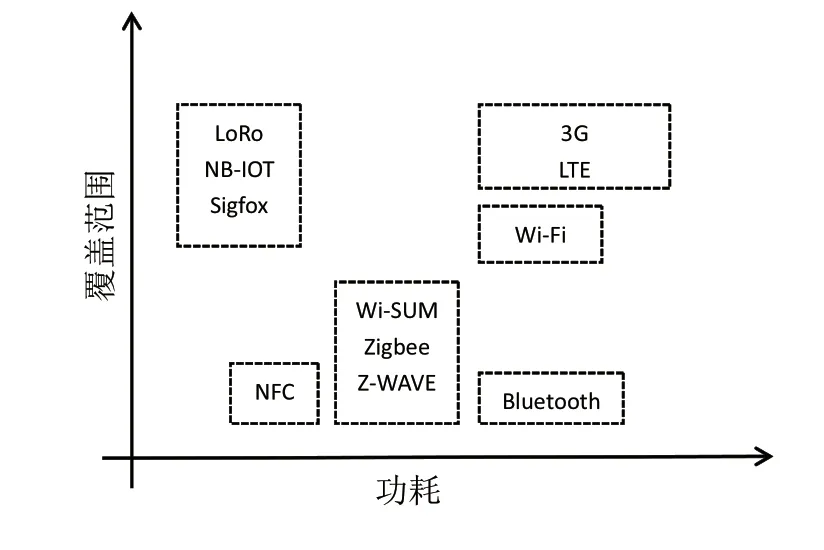
图1 各个无线通信技术功耗与传输距离对比
1 基于LoRa技术通信系统
基于LoRa的组网通信系统由数据终端、通信基站、集成通信模块的用户设备、具备通信功能的用户设备等组成,系统采用LoRa通信协议进行组网通信,实现命令或参数的下达,以及数据的采集与上传等功能。
本文设计一套基于LoRa的无线通信试验系统,模拟实现塔机施工过程中的通信功能,硬件搭建主要设备由主从LoRa、三菱FX3u型PLC、MCGS组态屏、电气线路、接线端子、VGA快转接头等组成。测试了通信系统数据丢包率、实现了塔机施工中各环节通信过无线收发、实时有效显示。
2 基于LoRa通信系统设计
以塔机施工环节为例,设计一套主从LoRa无线通信实验系统,塔机施工过程主要包括吊钩垂直方向的起升动作、水平方向的变幅和回转动作。上电工作时由位移传感器检测吊钩动作时的位置信息,塔机建筑施工基本构成环节及通信信息流程。首先是塔机从安全位置到物料现场区域调取物料,然后执行中间动作环节将物料吊送至施工现场区域卸载物料,最后一步塔机的吊钩提升到安全距离内准备下次的吊送施工过程。每个环节不同动作的操控,都涉及信息传输,选择LoRa设备搭建主从通信系统,以实现实时传输和信息的监看。
2.1 通信架构
本文设计的通信系统,由一套LoRa设备建立无线链路传输,首先设定通信系统的主从机和信道及目标地址,工控机作为上位机存储监控塔机工作状态。塔机的动作指令由PLC有线传输给LoRa从机,再经无线通信实现塔机的施工动作控制,系统组态MCGS关联施工变量和实时显示通信协议内容,无线架构如图2所示。
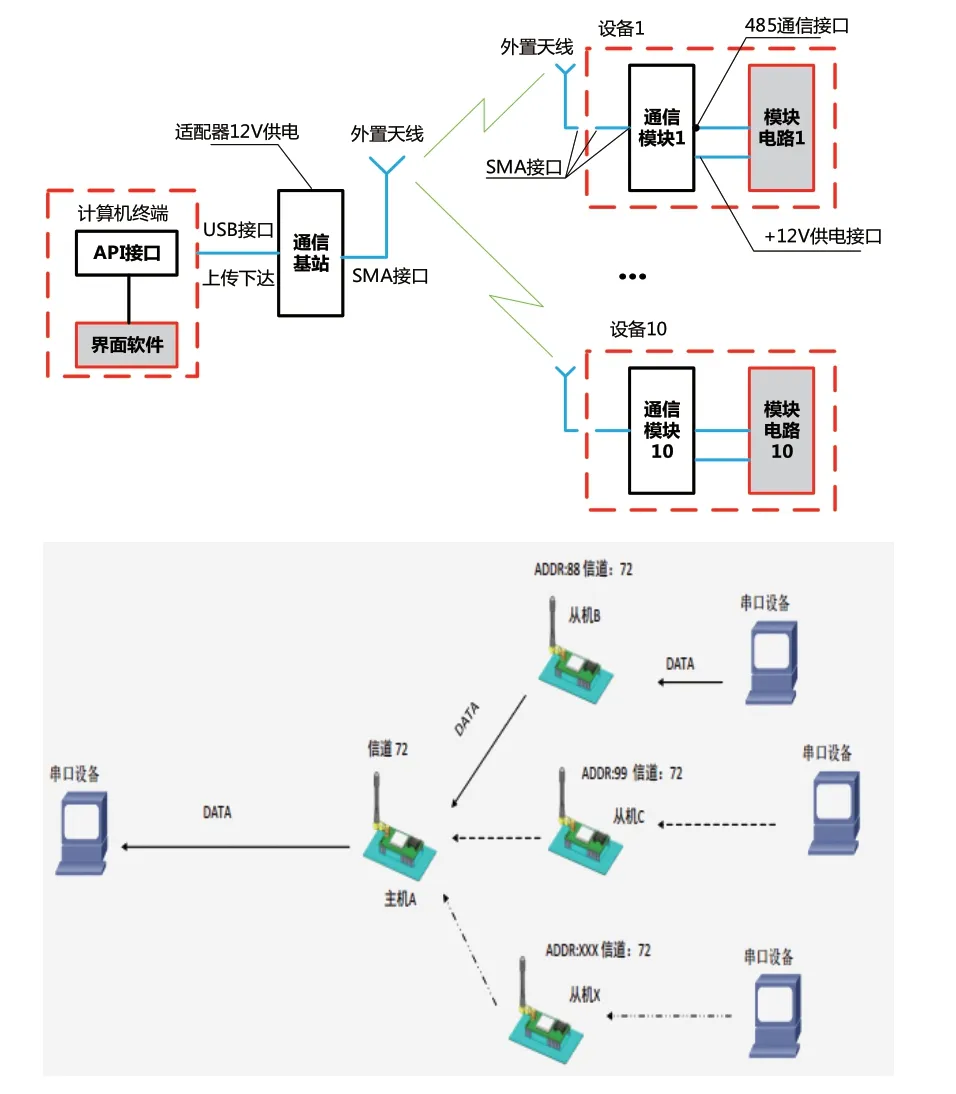
图2 LoRa无线系统的“无线架构”
LoRa无线系统的“无线架构”,采用的是星型网络,检查硬件线路连接正确后,给PLC设备和LoRa模块设备上电,下载主机和从机程序,调试实现了主机与多从机间的数据收发无线通信。
2.2 实验通信协议编制
本系统由无线LoRa和有线485进行组网通信,均采用MODBUS通信协议RTU通信方式。可进行点对点通信和点(基站)对多(模块)通信。塔机进行机械施工的过程中,塔机驾驶室工控机和地面远程无线通信,设计握手通信协议。如表1。
2.3 系统组成及功能
搭建测试平台进行链路通信实验,实验板面上,三档开关实现点动和常动控制的切换,左侧档位常动模式,右侧档位点动模式,中间档位无效。摇杆前/后动作,实现变幅电机正/反转控制;左/右动作,实现起升电机的正/反转控制。如图3。

表1 实验系统通信协议
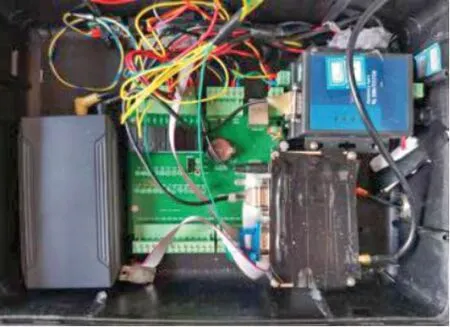
图3 搭建LoRa无线系统实物图
触摸屏MCGS组态界面,主要功能有:显示收发遥控数据,遥控器权限及选控电机指示,GPS定位信号指示及收发数据显示和按键透传,以太网相关参数读写。
2.4 MCGS组态设计
监控界面通过组态软件设计(如图4),系统添加输入输出设备模块及变量,可以实时显示收发数据和通过指示灯判定塔机动作的情况。组态界面有2个数据显示区,5个指示灯、1个模式选择区、12个关联按键。具体功能如下。
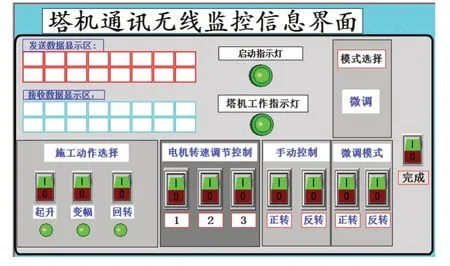
图4 实验系统MCGS组态设计
1)发送数据显示区 通信过程中,由从机LoRa发送给主机设备的协议数据信息。
2)接收数据显示区 通信过程中,由主机LoRa发送给从机设备接收的协议信息。
3)动作选择 根据现场工况,机械施工起升、变幅、回转动作的选择和状态指示,出现异常指示灯闪烁警告。
4)电机转速控制 搭建的模拟测试系统,对电机工作设定为3个操控档位进行测试,通过协议完成档位选择确认。
5)手动控制 塔机操控模式可以变换,直接由外接摇杆手动进行塔机动作。
6)模式选择 组态显示设计的3种操控模式,包括档位控制模式、手动控制模式、微调模式。
7)微调模式 设定一种就位微调电机转速,模拟实现就位时的微调动作。
8)启动指示灯 系统上电自检,指示系统状态情况,不正常及时检查维护。
9)塔机工作指示灯 在操作施工环节,显示工作状态是否正常。
10)完成按键 系统检测到吊钩复位到安全距离内,塔机施工完成后,关闭系统。
3 实验测试
在实验楼和室外塔机模型进行了多次实验检测,通过操控主机实现塔机的控制作用,将物料从指定取料位置吊运到指定施工位置,包括塔机的起升动作、变幅动作、回转动作的调控,远程通信效果良好、界面随动跟随流畅,平均数据丢包率0.05%,满足工程设定标准。如图5。
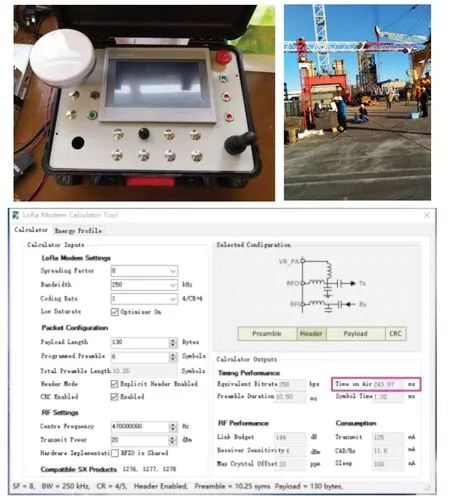
图5 实验测试图
为确保无线通信系统的可靠性,对无线通信系统进行多项测试,软件界面如图6,测试内容及结果如下。
3.1 测试1
测试调节LoRa无线通信系统主机与从机之间接收发送数据信息,测试结果表明任意数据在传输过程无丢失。

表2 测试2数据记录表

表3 测试3数据记录表
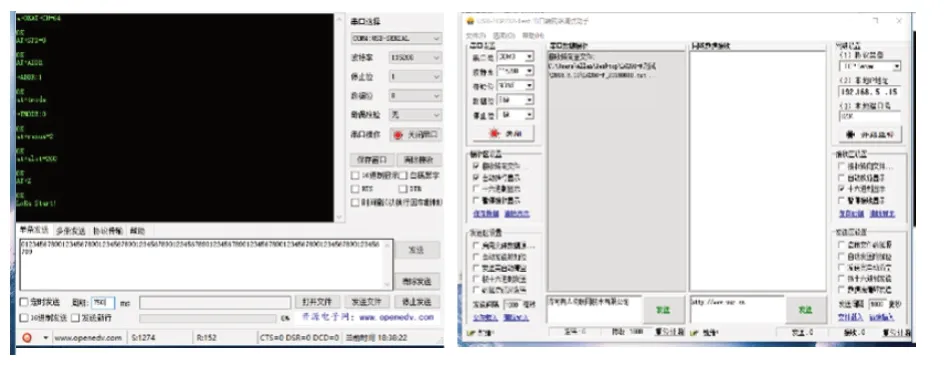
图6 发送(左)及接收(右)使用软件截图
3.2 测试2
电脑通过串口助手由LoRa1给LoRa2发送数据,通过电脑串口助手显示接收数据。每包126字节进行测试,多次测算丢包率情况丢包率在0.0285%以下。测试记录如表2。
3.3 测试3
测试结果表明LoRa无线通信系统主机与从机之前多组数据同时发送,丢包率为0,好于工业标准0.05%以下,测试记录如表3。
3.4 测试4
对LoRa无线通信系统进行了隔墙性能的测试,在有多重墙体的复杂室内环境下大约40m范围内,穿越9层实验楼墙体,可以实现稳定的主、从机数据无线通信。本测试均在信道72,每包126字节进行测试,丢包率万分之五以内,符合工程要求。测试场所:从实验楼隔教室进行穿透墙层实验。主要测试参数设置及测试结果如表4。
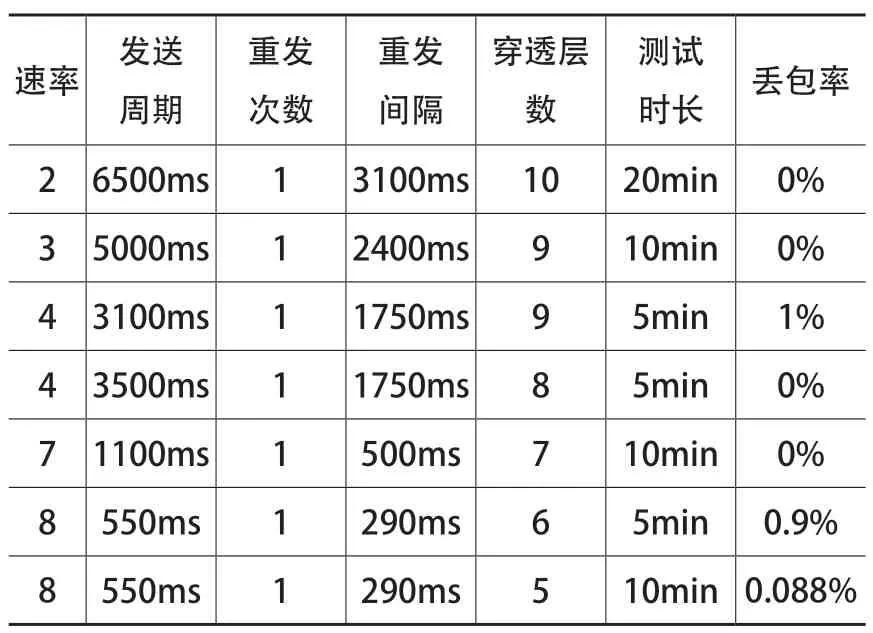
表4 测试4数据记录表
3.5 测试5
进行数据传输测试,电脑通过串口助手由LoRa1给LoRa2发送数据,通过电脑串口助手显示接收数据;电脑通过串口助手向PLC循环发送2个字节的数据,采取有线通信,无LoRa接入;电脑通过串口助手接从机LoRa向PLC主机LoRa发送数据,通过PLC显示接收数据。测试表明PLC和串口助手间,232通信和485通信实时有线通信测试,数据丢包率极小。PLC无线485通信准确及时,采用无线LoRa系统485通信数据传输,丢包率在万分之五以下,符合工程要求。
调试完成两套不同通信信道的LoRa无线系统,通信信道和波特率分别采用72、115200,82、19200。测试结果表明LoRa无线系统在波特率为19200,发送间隔为500ms的情况下丢包率最少。
3.6 测试6
LoRa置于密闭金属壳体内部穿透通信测试,测试结果表明将LoRa置于密闭金属壳体内部通信仍然可以实现稳定的主、从机数据无线通信,符合工程要求。
说明:重发间隔需大于发送所需时间加接收节点回复ack时间,即slot>=243.97ms(单次发送所需时间8)+10ms(接收方回复ack时间估计值)。发送频率>243.97(单次发送所需时间)+260ms×2(保证有两次重发时间)=763.97ms。
4 结语
本文研究了基于LoRa的装配式建筑施工通信过程,并搭建了一套基于LoRa的装配式建筑施工通信测试系统,在实验楼内和室外塔机模型完成重复性通信效果测试。
1)对大功率LoRa无线通信系统进行了隔墙性能的测试,在有多重墙体的复杂室内环境下大约100m范围内,穿越16层实验楼墙体,可以实现稳定的主、从机数据无线通信,符合工程要求。
2)实验测试分析可知通信过程中,数据丢包率符合工程需求且安全可靠,满足工程通信系统的安全性与稳定性。
3)通过实际的现场试点应用验证表明,本文中研究并设计的技术应用方案,试验效果良好,可以有效提高设备在线率并降低现场维护设备频次,提高工作效率,具有非常好的推广前景。
