基于倾斜摄影测量技术的城镇房产调查研究
2020-11-21高树孔
高树孔
(新疆维吾尔自治区第二测绘院,新疆 乌鲁木齐 830002)
1 引言
由于城市房地产调查时间紧、任务重,使用传统调查和野外测绘方法逐渐不能满足工作需求[1]。无人机倾斜摄影测量技术是近年来发展的一种全新技术,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点,可快速生成直观灵活的3D 模型,准确获取房屋的权属界线,能真实反映房屋和土地利用状况[2]。本文结合实际案例,利用无人机倾斜摄影技术开展测量,并对该技术进行房产测绘的流程进行了探讨。
2 无人机倾斜摄影
2.1 航摄仪
本文使用配有五镜头DM5-3600 航拍相机的DM-402H 旋翼无人机,进行多角度倾斜摄影获取图像数据。
2.2 航线设计
某城镇的房产研究区域总计6.65 平方公里,超过17000 个地块。航拍路线的规划基于其形状和范围,通常需要东西向部署,考虑到项目的独特位置,总共在南北方向部署了113 条路线,进行了31 次飞行,总共拍摄了109810 张航拍照片。
2.3 参数设计
2.3.1 航摄高度的确定
根据项目区域特点,通过对城市建筑物的高度和相关障碍物的情况进行现场分析,最终确定了倾斜摄影测量的相对飞行高度为100 m。地面分辨率和飞行高度之间存在以下几何关系[3]:

公式(1)中:f为焦距;H为飞行高度;u为像元大小;GSD为地面分辨率。根据公式(1),五个方向同时获取的图像分辨率为:垂直方向的图像为1.4 cm,前后视和左右视的分辨率则为1.0 cm。
2.3.2 航摄重叠度的设置
根据任务精度要求,将航向重叠设置为70%至80%,旁向重叠设置为60%至70%。
2.3.3 区域覆盖设计
航空摄影应覆盖整个项目区域。考虑到建模效果和区域边缘要素的精度,航空摄影必须在项目区域范围外增设3 ~4 条航线。
3 像控点及空中三角测量
3.1 像控点测量
3.1.1 像控点布设
航拍前对像控点采用主动设计法,根据调查区域的形状和摄影路线,网格间距为150 m。像控点一般选择在视野开阔的开放空间,避免特征遮挡,确保每个镜头图像可见,共布设247 个像控点,位置如图1 所示。
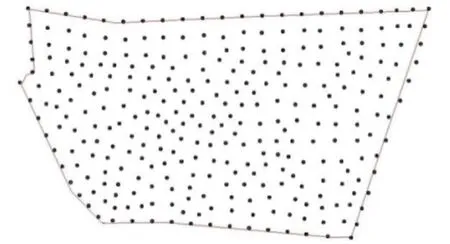
图1 像控点位置
像控点位置取决于站点,通常用制作的模具将徽标放置在现场,徽标为白色十字,中心点是直径5 cm的圆形黑色点。设置图像检查点徽标后,需从不同角度现场拍摄2 ~3 张照片,照片中应有明显参考对象。
3.1.2 像控点测量
使用省级综合卫星定位服务(CORS)系统测量图像控制点。根据GNSS RTK 图根级精度要求,使用网络RTK 测量方法。点位置误差不超过5 cm,进行两测回观测。测量时,将卫星保持在仰角15°以上高度,卫星数不少于6,PDOP 值小于4。观测前,平面收敛阈值的距离不超过2 cm,高度收敛的阈值不超过3 cm。测回观测时,仪器须在测回中初始化,测回之间的时间间隔超过60 s,须记录每个测量回合的观察值,在获得固定的RTK 解决方案后,收敛是稳定的。平面坐标分量小于2 cm,垂直坐标分量小于3 cm,将两个测回结果取平均值作为图像控制点测量的最终结果。
3.2 空中三角测量
空中三角测量根据计算机配置、航片数量和检查点位置等进行划分和计算。使用Context Capture 软件导入原始图像、相机参数和POS 文件,自动提取关键点并选择像对、初始化外部目标元素、自动匹配连接点、控制点参与光束平差、色彩均衡等。通过空中三角测量计算,地形平均分辨率为1.24cm。调整后图像控制点平均误差为0.53 像素,满足精度要求。
4 三维模型建立
采用多个高性能服务器进行集群式并行晕渲,使用Context Capture 软件,基于空三加密成果进行3D重建,经自动执行密集图像匹配、3D TIN 网格构建、白体3D 模型创建、自动纹理映射、纹理图集打包、LOD 生成经过处理后,以OSGB 格式生成实景三维模型。
5 数据采集
内业采用EPS 3D Survey 三维测图系统软件,将实景三维模型(OSGB)导入测图系统。根据实景三维模型数据采集房屋要素,采集时采用正射影像与三维模型窗口联动模式。该模式下,图2 左侧是正射影像窗口,右侧为实景三维模型窗口。图3 是人工采集形成的房地产数据图,清楚显示了房屋结构和楼层数,可大大提高房地产调查项目的生产率。

图2 数据采集窗口
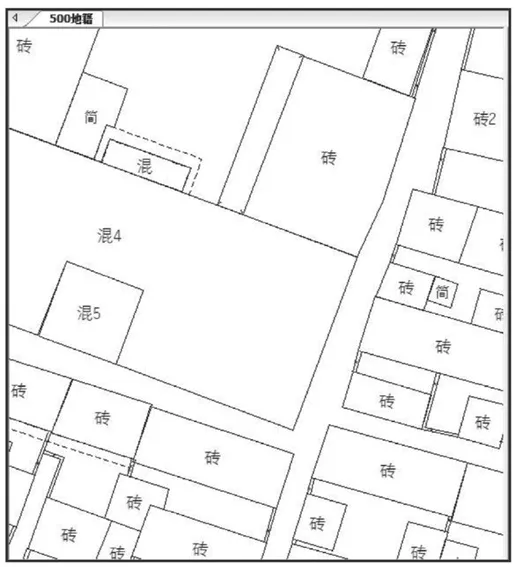
图3 房地产数据
6 精度分析
外业采用GPS-RTK 和全站仪,主要对房角点、围墙拐点等进行了全野外平面坐标采集,共采集外业检测点1029 个,与内业采集数据坐标进行了精度对比,统计情况如表1 所示。
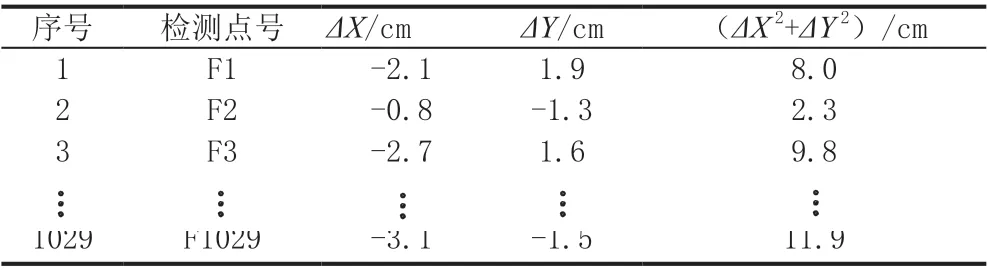
表1 精度统计
根据同精度检测时,中误差计算公式如下:

公式(2)中:n为检测点总数;Δi为较差。
根据表1 中外业检测点的情况,n=1029 个,Σ 总=23608.6 cm,计算结果最终检测点中误差为3.4 cm, 满足城镇房产调查精度5.0 cm 的要求。
7 结束语
本文结合实际案例,探索了无人机倾斜摄影应用于城镇房产调查测绘的方法和技术流程,计算得出检测点中误差为3.4 cm,满足城镇房产调查精度的要求,验证了该技术在城镇房产调查测绘中应用的可行性。
