三维激光扫描技术在地铁隧道检测中的精度分析
2020-11-21占晓明郑佳佳袁珊丽
占晓明 郑佳佳 袁珊丽
(浙江华东测绘与工程安全技术有限公司,浙江杭州310014)
1 引言
近年来,随着地铁建设的快速发展,地铁隧道灾害变得尤为突出,其安全隐患主要包括隧道结构的变形、渗水、脱落、裂缝等[1]。随着技术的发展,传统测量方法由于自身局限性,如全站仪检测方法采集密度低、速度慢、效率低,近景摄影测量对工作环境光线要求高,越来越难以满足隧道检测要求。
三维激光扫描技术发展于上世纪90 年代,作业方式具有非接触、高效率、高密度和数字化等特点,被称为继GNSS 导航定位技术之后测绘领域的又一次技术革命[2-3]。本文分别采用架站式三维激光扫描仪和移动式三维激光描仪采集数据,并以全站仪测量结果作为精度评定的标准,对三维激光扫描仪测量成果进行精度分析,验证了三维激光扫描技术的可用性。
2 三维激光扫描技术工作原理
2.1 架站式三维激光扫描原理
架站式三维激光扫描系统类似于传统测量中的全站仪,由激光扫描仪及控制系统、内置数码相机、后期处理软件等组成。在仪器内,通过两个同步反射镜快速旋转,将激光脉冲发射体发出的窄束激光脉冲依次扫过被测区域,通过测量时间或相位差计算距离,再根据脉冲激光发射角度,计算出被测点的三维坐标。
架站式三维激光扫描仪通常使用仪器内部自定义坐标系统,扫描仪的激光发射点为坐标点O,Y轴为激光束发射方向,Z轴竖直向上,X轴垂直于YOZ面。三维坐标测量原理如图1 所示。
公式(1)中,S是被测物体表面任意点P到扫描仪激光发射点O的斜距,水平角α是横向扫描角度值,竖直角β是纵向扫描角度值。因此,可根据距离值S、水平角度值α和竖直角度值β求出任意点P的三维坐标。
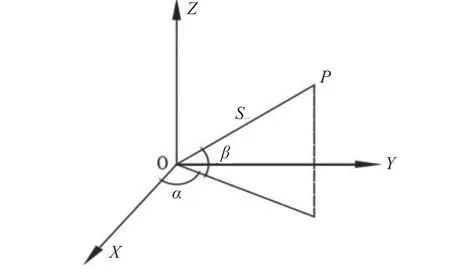
图1 三维坐标测量原理图

2.2 移动式三维激光扫描原理

将扫描点相对扫描中心的二维坐标与移动三维激光扫描系统位移数据绑定,即可得到扫描点三维坐标。
3 数据采集与处理
实验在杭州某运营地铁隧道中进行,在选定区间的地铁轨道两侧合适位置布置黑白棋盘靶标作为特征点,依次采用TM50 全站仪、FARO S70 架站式三维激光扫描仪、GRP5000 移动式三维激光扫描仪进行测量。
3.1 FARO S70 架站式三维激光扫描仪作业流程
FARO S70 架站式三维激光扫描仪扫描分辨率设置为1/4,质量精度为3 倍,扫描仪需严格执行调平设置,打开补偿器,现场测量禁止人员走动。扫描仪工作原理为单点测量,其中正交入射精度最高,测试中所有断面数据尽可能满足正交入射。实验所有测量数据不采取拼接形式,后处理数据直接在原始点云提取断面。
3.2 GRP5000 移动式三维激光扫描仪作业流程
分别采用50Hz、20000 点每圈和100Hz、10000 点每圈采集数据,一人推行小车采集数据,一人记录。GRP5000 移动式三维激光扫描仪按规定在选定区间采集三次同向数据,现场人员记录台账。采用最新版本RAIL 处理数据,数据断面严格按现场布置标志点提取。
4 精度分析
使用的仪器在数据采集时有各自的坐标系,统一坐标系会带来额外的工作量及坐标转换误差。因此,实验不采用直接对点坐标分析方法,而是将仪器自身坐标系统下获得的各靶标中心点间距作为最终成果进行分析。GRP5000 移动式三维激光扫描仪点云采集方式为线扫描模式,分别采用50Hz 和100Hz 扫描频率进行了10 次同向数据采集,并用白塞尔公式计算了误差,成果统计如表1 所示。50Hz 扫描频率下,测量成果最弱点中误差为±0.9 mm,100Hz 扫描频率下,最弱点中误差为±1.8 mm,50Hz 扫描频率测量成果精度更高。

表1 GRP5000移动式三维激光扫描仪在50Hz和100Hz下测量结果差值及各自中误差
各测量系统间差值比如表2 所示,TM50 全站仪与FARO S70 架站式三维激光扫描仪测量结果相仿,最大差值为1.8 mm,GRP5000 移动式三维激光扫描仪与TM50 全站仪、FARO S70 架站式三维激光扫描仪的较差较大,最大差值分别为4.6 mm 和4.7 mm。实验中FARO S70 架站式三维激光扫描仪只进行了单站扫描,因此没有点云拼接误差,数据后处理过程采用曲面拟合的方式自动提取靶标中心点,故精度较高。GRP5000 移动式三维激光扫描仪由人工提取靶标,所以误差产生原因除仪器本身精度和扫描频率外,也与人工识别靶标有关。
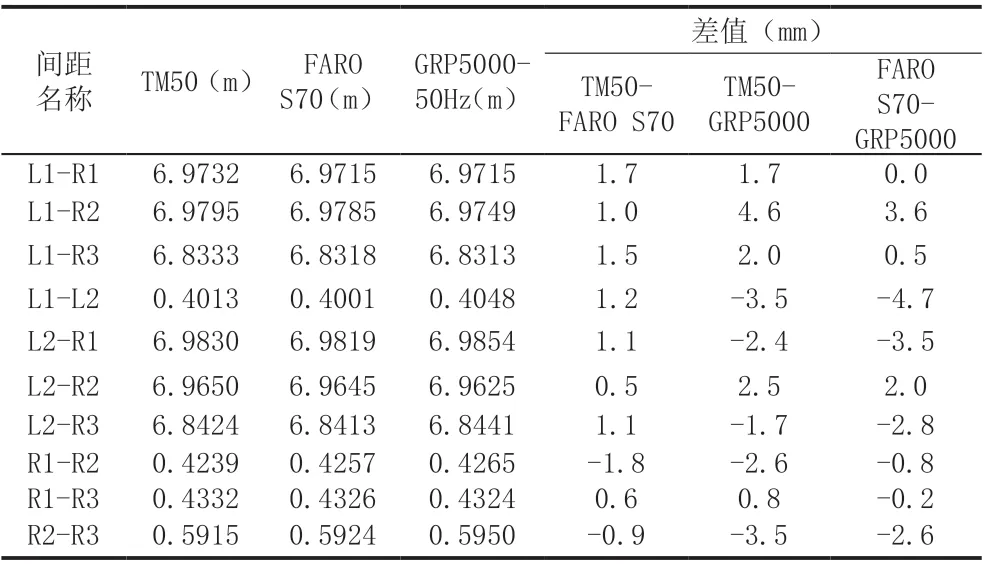
表2 各测量系统间差值对比
5 结论
本文通过在地铁隧道中分别使用三种测量仪器对所布设靶标中心进行提取计算并分析,得出以下结论:
(1)GRP5000 移动式三维激光扫描仪采用50Hz频率比100Hz 频率精度更高,但两者相差不大。与100Hz 扫描频率相比,采用50Hz 频率扫描作业时间更长,存储数据所需空间更大,数据处理时间更久,因此作业前可根据自身所需精度选择合适的扫描频率。
(2)FARO S70 架站式三维激光扫描仪达到TM50全站仪的精度,两者差值在2 mm 以内;GRP5000 移动式三维激光扫描仪精度稍差,与TM50 全站仪差值在5 mm 以内。
通过与传统测量方式的成果进行精度对比,实验证明了三维激光扫描技术在地铁隧道检测中的可用性,也为该技术的深入应用提供了依据。
