科考船传感器安装位置及偏角测定方法
2020-11-20郝艳楠
郝艳楠
摘要:科考船是装配多种调查设备,集成多种传感器,实现实时观测和数据处理的水上移動测量平台。本文基于科考船船体结构特点,提出了构建船体坐标系的方法,便于使用全站仪等设备进行测量。
关键词:科考船;传感器;安装位置;偏角测定
随着越来越多的专业科考船在水运和海洋调查中投入使用,为实现高精度的测量成果,精确测定众多传感器在船体中以及相互之间的位置和偏角关系,是目前科考船行业中亟待解决的问题之一。目前各种传感器的测量精度越来越高,传感器在船体坐标系中安装位置和偏角的测量精度已成为制约最终测量成果精度的主要因素之一。
一、科考船的结构特点
综合科考船能够满足海洋工程、海道测量、海洋生物、地球物理和海洋地质等多学科测量需求。目前我国已有多艘现代化综合科考船相继下水,以“向阳红01”、“向阳红03”和“嘉庚”号等为代表,远赴极地和各大洋开展海洋调查工作。出于水上测量目的,与其他游轮和货轮不同,科考船在结构上往往具备以下共性:1)为满足拖曳设备或水底取样设备的收放,综合科考船均具备更大的前后甲板作业空间,且后作业甲板往往较低,距离吃水面较近;2)为保证各种天线的信号接收强度和避免天线之间的干扰,科考船往往具备更高的桅杆,且桅杆上装备有更多的天线和传感器;3)为满足部分设备室内、振动小、恒温等条件,科考船往往在靠近船体重心位置有专门的仪器室放置AHRS系统、姿态传感器和重力仪等设备;4)为保证船体有足够空间安装声学换能器阵列,科考船船底设计有专门的换能器区域,或具备导流罩或Gondola结构体,这些结构体下表面较大且平坦。
二、船载测量传感器类型
根据传感器的用途,可以将科考船上的传感器分为GNSS接收机、AHRS姿态传感器和声学换能器传感器3类。GNSS接收机装在船舶桅杆上,具有很好的对空通视条件。例如Veripos LD7,Seapath320等成对GNSS接收机经数据处理后还具备提供船舶首向功能,天线对之间基线越长,所提供的首向精度越高,前提是需要精确测定天线对方向和船首向之间的夹角关系。Veripos LD7标称测量精度如表1所示:姿态传感器体积小,一般安装在靠近船体重心且震动较小的位置,实时精确提roll,pitch和heave值。OCTANCE,PHINS和MRG等还可提供首向值Head-ing,经过精确测量确定姿态传感器单元首向和船体首向的安装偏差后,即可实时获得船体首向。声学换能器是海洋调查中非接触式探测的最常用传感器,多用于单波束、多波束测深仪、浅地层剖面仪、声学多普勒测流仪和鱼探仪等设备。
三、传感器安装位置和偏角测定
船舶在干船坞内进行传感器测量时可使用具备无棱镜反射的高精度全站仪观测,例如莱卡TS50等。
(一)位置测定方法
船坞周围应当有至少2个及以上相距大于100m的C级GPS网控制点,根据船体结构和船坞实地情况,在船舶周围和船上选择设站点,并做好标识,开展闭合导线或附合导线控制测量。经联测已知点或方位,平差计算后得到各设站点坐标。船舶内部结构复杂,位于船舱内的传感器往往无法在导线点上直接观测到,因此需要布设支导线进行坐标和方位传递。传感器自身测量中心有的位于传感器内部,需根据设备规格进行偏心测量,利用外部观测点和传感器内部测量中心的几何关系归算到传感器测量中心,有的设备测量中心位于传感器外表面,且有明确标识,对于安装在桅杆上且只需要测定船体坐标系中位置的GNSS天线,可使用全站仪无棱镜模式在多个导线点上多次观测,无需架设棱镜测量,因为无棱镜测量精度要远高于GNSS接收机的定位精度。对于能提供艏向的GNSS接收机对,若使用无棱镜模式观测,则经观测计算得到的天线对方位的精度应高于天线对自身提供的艏向精度。对于其他传感器,根据仪器测量精度选择是否使用无棱镜模式观测。
(二)安装偏角测定方法
传感器安装偏角分为Yaw,Roll和Pitch三种,这3种安装偏角均为欧拉角。不同传感器均有各自定义的测量坐标系,有的传感器坐标轴指向与船体坐标系指向有所不同,姿态传感器和声学换能器上均有明确标识。Yaw安装偏角指的是传感自身的首向所指的地理北方位和船舶首向(X轴)所指的地理北方位之间的偏差;Roll安装偏差指的是传感器在左右舷方向的坐标轴与船体坐标系Y轴之间的未对齐偏差;Pitch安装偏角指的是传感器在竖直方向的坐标轴与船体坐标系Z轴的未对齐偏差。
(1)PHINS/OCTANS安装偏角测定方法
PHINS和OCTANS不仅可以输出roll,pitch和heave等姿态数据,同时可以输出yaw首向数据。Yaw,roll和pitch的安装偏角测定流程如下:
1)首先在PHINS和HYDRINS的配置软件中,将所有的安装偏差设置为0;
2)使用全站仪测得FRO和A的坐标或在FRO和A架设RTK,进行RTK基线测量确定船体首向 ,同时记录PHINS和OCTANS的首向数据heading,观测一段时间后分别取平均值 ,2组数据平均值之差就是PHINS和HYDRINS的首向安装偏差: ;
3)测定FRO-A的方位 后,在过FRO且方位为( )的方向上找一标识点S,则向量FRO-S在XOY平面上的投影即为船体坐标系Y轴的方向向量;
4)将步骤2计算得到的 偏差 输入到PHINS和OCTANS的配置软件中,计算XOY平面沿着船首向 的倾角p,同时记录PHINS和OCTANCS输出的 姿态角,取一段观测时间的平均值 与p作差,即得到角安装偏差 ;
5)将步骤2和步骤3中得到的 和 输入到PHINS和OCTANCS的配置软件中。类似地,求得XOY平面沿Y轴的倾角r。测量过程中同时记录PHINS和OCTANS输出的roll数据,取一段观测时间的平均值 与r作差,即得到roll角安装偏差 ;
6)至此,完成PHINS和OCTANS的安装偏角测定,上述观测顺序不可更换。
(2)声学换能器安装偏角测定方法
声学换能器因尺寸较大,且设备规格书中严格定义了坐标轴向,可借助换能器安装支架和换能器边缘的螺杆作为参考点进行观测和计算。换能器安装偏角测量方法如下:
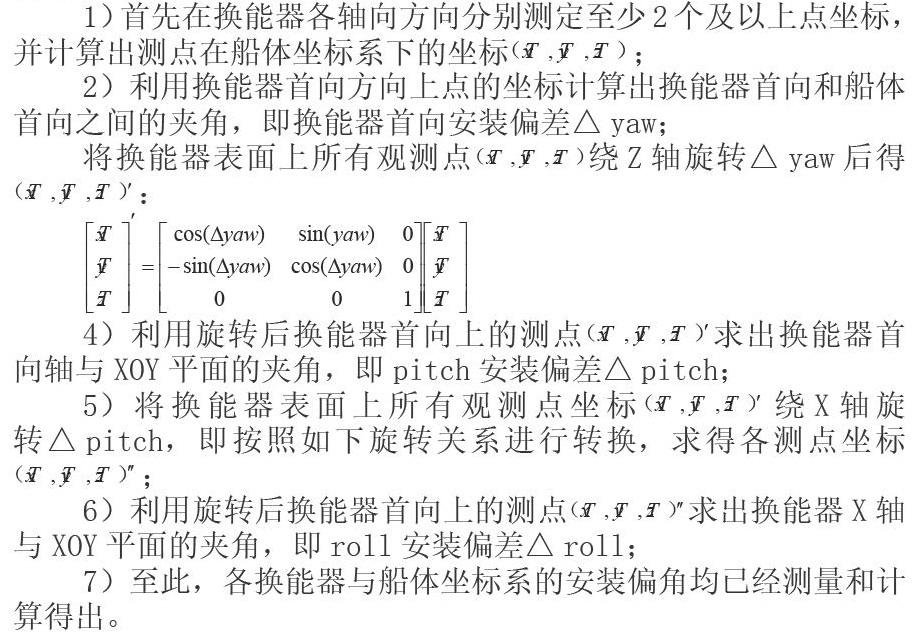
1)首先在换能器各轴向方向分别测定至少2个及以上点坐标,并计算出测点在船体坐标系下的坐标 ;
2)利用换能器首向方向上点的坐标计算出换能器首向和船体首向之间的夹角,即换能器首向安装偏差△yaw;
将换能器表面上所有观测点 绕Z轴旋转△yaw后得 :
4)利用旋转后换能器首向上的测点 求出换能器首向轴与XOY平面的夹角,即pitch安装偏差△pitch;
5)将换能器表面上所有观测点坐标 绕X轴旋转△pitch,即按照如下旋转关系进行转换,求得各测点坐标 ;
6)利用旋转后换能器首向上的测点 求出换能器X轴与XOY平面的夹角,即roll安装偏差△roll;
7)至此,各换能器与船体坐标系的安装偏角均已经测量和计算得出。
针对科考船上多种测量传感器的安装位置和安装偏角难以精确测定的问题,提出根据科考船的结构特点和各传感器类型特征构建船体坐标系的基本方法,给出使用高精度全站仪测定各传感器在船体坐标系中的安装位置和安装偏角的原理及流程,并对大型声学换能器阵列平整度的测量给出方法和具体实施方案。
参考文献
[1]于凯本,张晓波,杨志国,于盛齐,宗乐,李正光,刘保华.深海技术装备公共研发平台的建设与思考[J].海洋开发与管理,2019,36(01)
[2]李治远,张道建,王海员,周明,张海泉,周欣.海洋综合科考船调查装备的布局与优化[J].船舶,2017,28(S1)
